

苏ICP备112451047180号-6
基于华中数控系统的数控原理实验平台研发
摘要
从整体上说,数控实训平台主要有两项设计功能:一是直观的展现典型数控设备的结构,二是可以模拟对典型数控设备的操作。结构展示功能是要构建典型的数控设备模型,直观的展现数控设备的物理结构、电气原理、信号通路、机械传动结构等内容;操作功能包括数控设备的功能性操作、设备组装操作和信号(数据)检测操作等项目。
项目设计的数控实训平台的硬件分包括三大部分:分别是数控系统电气控制操作台、铣床机械光机和机械运动检测仿真器。依据项目计划和申报材料,装置采用华中HNC-21M3数控装置作为目标数控系统的核心,采用三轴数控铣床(加工中心)作为数控实训目标模型,并采用型号为STM32F405ZG的ARM Cortex-M4处理器来设计信号检测和仿真装置。
数控系统电气控制操作台一方面包含完整的数控系统的全部功能,可以模拟对真实数控铣床(加工中心)的操作;另一方面可以反映真实数控铣床(加工中心)的电气控制系统结构,可以模拟组装调试数控设备的电气控制系统。铣床机械光机相当于一台铣床的模型,数控实训平台选用的铣床机械光机用于展示数控铣床的机械结构和运动过程;机械运动仿真器是与机械光机并行使用的设备,是机械光机功能的软件化、虚拟化设备。
关键词:数控系统,实训平台,电气控制操作台,机械光机
“基于华中数控系统的数控原理实验平台”可以协助高等院校和职业培训机构,加设数控故障诊断维修技术的相关课程,提高相关课程的教学质量。数控机床原理维修技术本身并不复杂,只是入门较困难,需要借助比较直观的教学工具。通过该平台,可以使学员较为全面、直观的了解数控机床的电气连接、机械机构和的运行原理。并以此为基础,得知数控机床的故障原因和维修方法。通过该平台开设数控故障诊断维修技术的相关课程,既可以培养专门的数控维修人员,更重要的是可以使数控加工操作人员也具备一定的数控故障维修常识和系统参数设置技能,可以做到平时用机床,坏时修机床。这样的人才一定更受企业欢迎。
2 数控系统分析
通常将数控设备电气控制系统中能够进行解析数控加工代码、进行数控插补运算、输出运动指令的电子装置称作数控系统,该装置是数控设备电气控制系统的核心;有时也将整个电气控制系统称为数控系统,数控系统包含能够进行数控运算的电子装置和进给驱动器、PLC和人机界面等。为了加以区分,下文将能够进行数控运算核心装置称作数控装置,将包含数控装置、驱动器、PLC、人机界面等装置的系统整体称作数控系统。
3 数控实训平台整体构成和功能设计
从整体上说,数控实训平台设计主要有两项功能:一是直观的展现典型数控设备的结构,二是可以模拟对典型数控设备的操作。结构展示功能是要构建典型的数控设备模型,直观的展现数控设备的物理结构、电气原理、信号通路、机械传动结构等内容;操作功能包括数控设备的功能性操作、设备组装操作和信号(数据)检测操作等项目。
项目设计的数控实训平台的硬件包括三大部分:分别是数控系统电气控制操作台、铣床机械光机和机械运动检测仿真器。
依据项目计划和申报材料,装置采用华中HNC-21M3数控装置作为目标数控系统的核心,采用三轴铣数控机床作为数控实训目标模型,并采用型号为STM32F405ZG的ARM Cortex-M4处理器来设计信号检测和仿真装置。
3.1 数控系统电气控制操作台
数控系统电气控制操作台一方面包含完整的数控系统的全部功能,可以模拟对真实数控铣床(加工中心)的操作,包括编写加工代码和PLC程序、模拟加工、进行系统设置等;另一方面可以反映真实数控铣床(加工中心)的电气控制系统结构,可以模拟组装调试数控设备的电气控制系统。构成数控系统电气控制操作台的主要元件有:一台华中HNC-21M3数控装置、三台华中HSV型伺服控制器、三台GK60401-6AF21-FE(FB)型永磁式交流同步电机、一台FR—E720—0.75K型(三菱)变频器、一台Y80M1-4异步电机,以及辅助电机和外围的电气开关(阀)元件等。
实训装置采用模块化设计,整体结构由安装在一个包含供电系统的台体框架上的各个功能模块构成,不同功能模块有相似的外形尺寸和安装孔,同种供电类型的功能模块可以互换。每台实训装置可以安装的功能模块有:一个数控装置模块、一个继电器交换模块、三个伺服进给模块、一个主轴模块、一个刀库模块、一个辅助设备模块。模块之间的连接线分为两类,一类是供电回路,另一类是信号回路;其中供电线路回路由模块与母体框架之间连接,模块之间不能互联;而信号线可在模块之间按照数控系统电气原理相互连接,构成连接关系清晰的数控电气控制系统。由于华中系统控制信号是开放的,故所有电源线和控制线都可由使用者在外部采用带连接器的导线连接(需要考虑差分信号和共地信号的信号质量)。
3.1.1 母体框架
台体框架内的供电系统应包含功能模块可能用到的多种电源,包括直接来自外部的三相380V交流电源、来自伺服变压器的三相220V交流电源、来自控制变压器的单相220V和24V交流电源,以及两个来自开关电源的24V直流电源。供电系统还包括每一路电源的支路开关和总开关。这些电源以总线的形式贯穿整个台体,分布在台体上的各个功能模块可以从合适的电源线上取电。
3.1.2 功能模块
共计划建造六种功能模块,分别是数控装置模块、继电器交换模块、伺服进给模块、主轴模块、刀库模块、辅助设备模块。
(1)数控装置模块
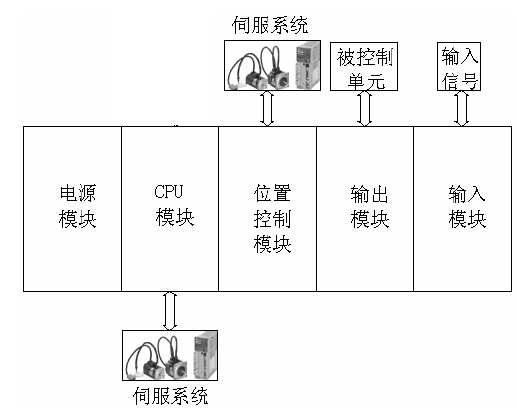
数控装置模块需要提供24V直流电源。数控装置模块内安装数控装置,数控装置模块正面是数控装置的LCD显示器、系统键盘和机床面板,方便在上面进行数控装置基本操作。数控装置背面是各种连接器,包括PLC端子、伺服接口、主轴接口等,也应从模块正面引出,方便用户进行系统连接。
(2)继电器交换模块
构成继电器交换模块的主要元件是继电器、接触器和LED指示灯。继电器交换模块的主要功能是将数控装置PLC输出点直流24V的开关量信号隔离并转换为各种负载的驱动电力,以及将各种输入信号转换为数控装置PLC输入点所能识别的24V直流开关量信号,并用指示灯指示这些信号。继电器交换模块需要供给24V交流电和除数控装置模块以外的另一个24V直流电。
(3)伺服进给模块
每个伺服进给模块包含一个伺服驱动器和一个对应的伺服电机。伺服进给模块需要供给三相220V交流电源和24V直流电源。伺服驱动器上的各个信号接口应从模块正面引出,方便用户进行系统连接。
(4)主轴模块
一般与华中HNC系统对应的数控机床主轴采用变频器和异步电机,也有采用伺服驱动器和同步电机。装置中每个主轴模块包含1个变频器和一个对应的异步电机。变频器的模拟电压控制信号端口和开关量控制端口从模块面板上引出,方便用户进行系统连接。
(5)刀库模块
为了模拟加工中心的工作过程,特在装置中设计了一个刀库模型,可模拟一个简单的旋转式刀库的工作过程,刀库由PLC输出点控制,并有位置检测元件,可向PLC输入反馈信号。刀库的控制信号端子和反馈信号端子都由面板上引出。
(6)辅助设备模块
为了与装置的第三部分机械运动检测仿真器连接,代替机械部分模拟机床的运动、换挡等过程,特设计辅助设备模块。辅助设备模块主要包括安装在主轴模块、伺服模块等部件的电机上的转动检测元件、转速显示器、与PLC连接的换挡信号输入点、传动比输入按键等,可以按照设置的传动比和换挡关系,模拟显示工作台和主轴的实际移动速度和位置,并且具有信号转换功能,可将采集自电机轴的信号转换为总线信号,方便与机械运动检测仿真器连接。
3.2 铣床机械光机
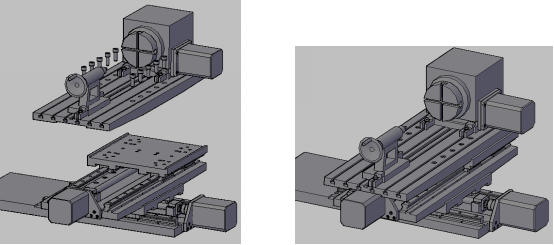
铣床机械光机相当于一台铣床的模型,数控实训平台选用的铣床机械光机用于展示数控铣床的机械结构和运动过程。一般的铣床机械结构相当复杂,但在数控铣床上由于大量采用了传动套件,结构相对较简单,提高了传动精度,并且方便展示运动过程。
铣床机械光机的构成分为支撑部件、传动部件、连接零件等几类。支撑部件有底座、立柱、工作台等,用于构成机床床身,安装各个传动部件;传动部件有直线传动部件、旋转传动部件、主轴部件等,直线传动部件用于驱动工作台做x、y、z向直线运动,旋转传动部件用于驱动工作台做A、B、C向回转运动,主轴部件用于支撑主轴和主轴传动;传动部件和支撑部件通过连接零件安装,连接零件包括各种连接标准件。
铣床机械光机由电机和各种电液动元件驱动,并通过各种检测元件向数控系统反馈信号,电机、电液动负载和检测元件是连接数控系统和机械光机的桥梁,其中电机受数控装置控制的伺服驱动器的驱动,开关量信号负载和检测元件通过开关元件与数控系统PLC连接。
铣床机械光机需要展示机床运动过程,与数控系统的输出信息相应正。为了简化结构,方便展示,光机应大量采用运动部件,总体尺寸较小,方便拆卸,并采用较小功率的伺服电机和主轴电机。光机上安装的电气动负载和走线也应清晰展示,并用指示灯指示开关量信号。
3.3 机械运动仿真器
机械运动仿真器是与机械光机并行使用的设备。机械运动仿真器包括铣床光机在内的多种机械光机的功能,是机械光机功能的软件化、虚拟化设备,同时又能精确显示这种虚拟运动的量值,以及模拟真实机床与数控装置交换的其他各种信号。
机械运动仿真器以ARM Cortex-M4处理器为核心,由电子线路及其内部运行的嵌入式软件构成。电子线路包含ARM处理器、7寸显示器、按键、输入输出接口、电机轴转动检测元件等。装置通过按键设置所仿真的机床类型、工作台尺寸、进给轴传动比、主轴传动比、主轴换挡信息以及其他开关量检测元件和负载的类型等,通过按键设置可将该装置虚拟为一台具体的机床;7寸显示器用于显示装置所虚拟的机床的具体形象,以及相关数值和参数、信号等;输入输出接口用于与数控装置PLC接口相连,虚拟数控装置所控制的刀库、限位开关、换挡电磁离合器等机床开关量元件或负载。电机轴转动检测元件用于检测进给电机和主轴电机的转角或转速,将进给电机实际转动信息输入装置,可虚拟出对应机床的工作台位置,并显示在液晶屏;同时得到主轴电机的转速转向也在液晶屏显示。另外为了扩大机械运动仿真器的应用范围,也可绕开实际电机,直接与数控装置的伺服轴接口和主轴接口连接,通过接收数控装置输出的伺服信号,结合预设的倍率信息,得到对应的虚拟机床工作台速度和位置;通过接收数控装置输出的主轴模拟控制信号,得到对应的虚拟机床的主轴转速和转向。
机械运动仿真器的主要功能有两个,一个是灵活演示与数控装置对应的机床运动,虚拟机床的工作过程;另一个功能是检测数控装置故障与信号质量,通过虚拟机床运动过程,检测数控装置输出信号的正确性。
4 数控实训平台电气控制系统设计
数控实训平台电气控制系统依照华中HNC-21数控装置的典型电气控制系统,采用模块化结构进行设计,既要实现数控电气装置基本功能,又能展示其基本结构和连接关系。本部分内容首先介绍华中HNC-21M数控装置的典型电气控制系统,再基于此系统,设计数控实训平台电气控制系统各模块电路,最后设计其机械结构。
4.1 基于华中HNC-21M数控装置的典型电气控制系统
这里将数控电气控制系统分为A电源回路、B主回路、C驱动器回路、D控制回路、E数控装置、F内装式PLC等六部分电路。
4.1.1 电源回路
电源回路负责为数控系统各模块和设备供电。整个系统中共有4种电源,分别是三相380V电源、三相220V电源、单相220V电源、直流24V电源。其中24V直流电源为数控装置本身和PLC输出端子供电,为了避免不同负载之间相互干扰,数控装置和PLC负载需要采用不同的直流24V电源供电,该电源通常为开关电源模块;单相220V电源由控制变压器产生,可为提供直流24V的开关电源供电,起到隔离作用,同时还可以为额定电压为220V的接触器线圈供电。有些场合也会使用单向110V交流电源,采用110V输入的开关电源和接触器;三相220V用于伺服驱动器供电,伺服驱动设备通常使用三相220V供电,由三相变压器外接380V三相电源产生,同时可以起到与外380V电源隔离的作用。三相变压器容量由伺服电机功率决定,变压比通常为1:1,输入采用星形接法,输出采用三角形接法,可由380V产生220V三相电源。三相380V电源由外部直接引入,为异步电机等负载供电,或为变频器供电。电源电路总、分开关采用低压断路器,干线和每个支线均采用断路器分隔。
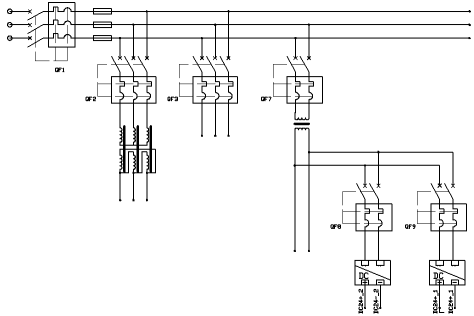
图4-1 电源回路

图4-2 主回路
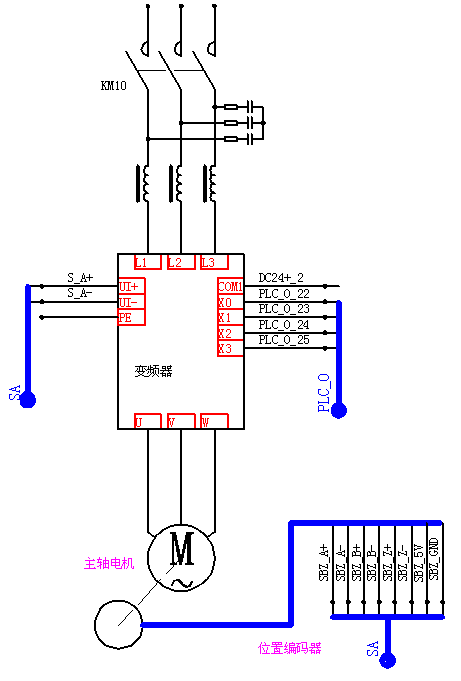
图4-3 主轴电机驱动电路
伺服电机驱动回路包括伺服驱动器和伺服电机。伺服电机类型、功率、速度反馈信号和反馈接口应与伺服驱动器一致。常见伺服驱动器为三相220V供电,供电由伺服变压器产生。电源与伺服驱动器之间接入接触器,保证在伺服未使用或故障时能够与电源断开。伺服驱动器输入端也要接入浪涌吸收器和电抗器,防止浪涌损坏伺服驱动器,也防止伺服驱动器干扰其他设备。伺服驱动器输出端连接伺服电机,电机速度反馈信号连接至伺服驱动器相应端口。伺服驱动器主要控制信号是速度控制脉冲和方向控制脉冲,速度控制脉冲频率决定伺服电机转速、方向控制脉冲决定伺服电机转向,这两个信号来自数控装置伺服控制端口,为了保证传输距离信号以差分形式传输,每个信号占用两根导线。除脉冲信号外,伺服驱动器还有一些输入输出开关量信号端子,依据伺服驱动器型号的不同,开关量输入信号有使能、电机轴锁定、释放等,开关量输出信号有状态、故障报警等,这些信号分别与数控装置PLC输出点和输入点相连,通过PLC程序控制伺服驱动器工作状态,并接收伺服驱动器状态反馈执行相应动作。若系统为全闭环控制,机床上安装有光栅尺等位置控制元件,则将光栅尺输出的脉冲信号(A、B、Z)连接至数控装置伺服控制端口(与该轴速度脉冲、方向脉冲在同一端口)。对于三轴数控铣床,则包含三个相同的伺服电机驱动回路,这三个伺服电机驱动回路共用同一个伺服变压器和接触器,但需要分别安装电抗器。
5 数控实训平台机械光机设计
数控实训平台中配套使用的光机,实际上是一台简化的机床模型。该装置能够清晰的展示机床的运动过程,观察电气控制装置输出的各种信号在光机上对应的运动过程,直观、定性的印证电气控制装置输出的信号的正确定,与电气控制装置配合使用,可以达到较好的教学、科研效果;同时机械光机也可以作为数控装置及系统的检测装置,验证数控装置输出信号的正确性,运动精度和驱动力等要素;光机若与装置整体的第三部分——机械运动仿真器结合使用,可以同时定量的显示这些要素,达到更好的使用效果。
这种机床模型的设计要点是:结构简洁、运动过程直观;运动精度需求较高;整体需求尺寸较小;结构尽量简单简单、零件数量较少,便于加工;光机上的电机及其他电气零件便于拆卸更换。
由于项目采用HNC-21M3铣数控装置设计电气控制装置,固在本章中设计三轴(第四轴可选)铣床机械光机。
1)着重研究分析了FANUC 0iD数控系统、SIEMENS 802D数控系统,和国产广数GSK983数控系统和华中HNC-21数控系统等几种常见数控系统,分析了这些数控系统的系统特点、拓补结构、关键部件、应用状况等情况。研究发现FANUC 0iD系统和SIEMENS 802D系统中各部件专用性较强,连接关系较为固定,硬件连接不灵活。这种系统可靠新较好,但缺乏互换性和元件通用型,基于这些系统研制硬件装配实训平台价值不大,且这类系统生产厂家售后服务系统较完善,基于使用者的装配修理技能的需求并不迫切。而广数GSK983数控装置和华中HNC-21数控装置为硬件开放的数控装置,数控装置对与之连接的其他元件并无限制,通信信号也是开放的。这类数控装置使用较灵活,可硬选配不同厂家不同性能的驱动装置和电机,数控系统电路构成较复杂,对使用者的装配修理技能的需求较迫切。故选用华中HNC-21数控装置为研究对象,研制数控实训装置。
2)研究分析了浙江天煌生产的THWLDH-1型华中数控车床实训平台,THWMDF-1型FANUC 0iC数控铣床实训平台,以及郑州控信生产FANUC 0iD数控实训平台等产品的设计要点。研究发现控信平台偏重软件设置,用户不能自由进行系统连接,而天煌平台偏重连接关系实验,但实验设施的特点过于明显,与现实中的数控电器柜的样式区别较大。经研究决定,应研制一种既能方便进行硬件装配和软件设置,又采用真实数控系统电气元件和布局的实训装置。
首先进行华中HNC-21系统的典型电气控制电路设计,这是该阶段的基础性工作,目的是为实训平台的设计和使用提供依据。这项工作以华中提供的连接说明书为主要参考,进行了大约1个月。实训装置电气部分的结构设计,进行了月三个月。根据前期设计要求,装置既要整体上具备真实机床电气柜的元件结构和形式,又要方便进行电气连接和软件设置实验,因此采用可互换的模块化设计,并花费了大量精力,在细节和感官效果上满足这些要求。之后是长达六个月具体设计,从整体结构到每个工模块的的结构设计,以及电路设计都一一完成,最终确定每一个电路元件的参数选型、每一个器件的安装尺寸,和每一个面板的丝印图样。光机设计工作也在另一个团队中同时进行,由于光机采用了大量传动套件,套件和零件选型十分重要,所以首先用时一个月进行铣床光机的主要元件选型,之后是长达六个月的光机详细结构设计和校核。实训装置电气部分和结构部分基本设计完成后,又花费了月三个月继续各项图纸的核对和整理。
(1)结构方面
数控实训装置既非传统的插线式电气实验设备的样式,又非真实数控机床上的电气柜样式,而是结合两者特点而成的模块插线式电气柜样式。传统的插线式电子电气试验台比较抽象,注重反映电路原理,缺乏电路元件和布局特点直观影响,而真实的机床电气柜难以进行连接试验;该数控实训装置结构上的创新点在于既有真实设备的样式,又能方便进行连接试验。为了实现这种设计,装置采用模块化结构,将数控电气系统的不同功能单元、以及相对固定的连接关系做成模块;将与软件、配置和功能实现有关的硬件连接,由使用者通过进行实验来完成。既能直观的、真实的反映数控电气系统结构,观察相对固定的电路原理,又能方便使用者练习、连接电路设计。
(2)功能方面
数控实训装置的功能的创新点在于综合性。基于模块化设计、采用真实元件构成、使用者自由连接等结构特点,装置可以作为一项多功能教学科研仪器,实现原理性教学、实践性教学、和数控故障检测仪器等三方面功能,涉及电气控制与PLC、数控电气原理、数控故障诊断维修等多门学科,以单一设备围绕“数控”这一中心概念而涵盖机电一体化专业大部分应用课程,同时还可以作为数控装置外围功能开发设备和数控装置以及外围器件故障诊断设备使用。
1)装置电气部分整体就是一套典型的(机床)电气控制系统,上面包含几乎全部常见低压元件,可以进行基本控制电路连接,用于电气控制与PLC课程的教学和实验;
2)装置电气部分可以搭建数控机床典型控制系统,反映数控电气控制原理,实现数控电气控制过程,同时结合机械光机部分,可以模拟数控机床运动过程。将能够应用于数控电气原理课程,实现电路、机械、数控参数、PLC编程、加工编程、数控机床操作等多方面实验功能。
3)装置电气部分可以在连接上模拟数控系统上多种不同故障,用于数控故障诊断维修课程的教学和实验,直观的了解不同故障对应的不同现象。
4)装置可以作为科研设备使用,开发数控装置外围电路。以装置上安装的数控装置为核心,试验搭建外围电路(如刀库控制),编写PLC程序,并在装置上试运行,并结合光机部分模拟整体运行,又避免在真实机床上进行测试的风险,开发数控装置外围电路和程序。
5) 由于装置采用模块化设计,可以将被测数控器件(如数控装置、伺服驱动器等)安装在相应模块上,搭建系统,利用装置上的其他正常的硬件进行故障判断和检测。
(3) 设计原理方面
数控实训装置的原理性创新在于对现有数控系统硬件结构的归纳总结,使依照此原理设计的装置具有更广泛的适用性。虽然不同的类型数控装置之间、同类型不同型号的数控装置之间、以及同型号数控装置在不同的应用场所之间都存在差异,但共性的部分是存在的。项目通过对不同数控装置、以及同种数控装置不同应用方式的研究,归纳出这些应用系统的共性,将其设计为数控实训装置电气部分的母体框架和固定线路;同时归纳出这些应用系统上个性化、参数化、软件化的部分由使用者自行搭建。所以通过该实训装置可以使用不同的数控装置,并设计出该数控装置的任意一种应用形式。
[2]《数控机床维修技师手册》编委会.数控机床维修技师手册[M].北京:机械工业出版社,2006.1
[3]杨雪翠.FANUC数控系统调试与维护[M].北京:国防工业出版社,2010.10
[4]张爱红.FANUC数控系统链接调试与维护[M].北京:人民邮电出版社,2010.7
[5]曹智军,肖龙.数控PMC编程与调试[M].北京:清华大学出版社,2010.8
[6]吴宗择.机械零件设计手册[M].北京:机械工业出版社,2003.11
[7]闻邦椿.机械设计手册(第5版)[M].北京:机械工业出版社,2010.1
[8]隋秀凛,高安邦.使用机床设计手册[M].北京:机械工业出版社,2010.1
[9]李宏胜,朱强,曹锦江.FANUC数控系统维护与维修[M].北京:高等教育出版社,2011.8
[10]黄广文,邵泽强,韩亚兰.FANUC数控系统连接与调试[M].北京:高等教育出版社,2011.5
[11]刘江,卢鹏程,许朝山 .FANUC数控系统PMC编程[M].北京:高等教育出版社,2011.8
[12]武汉华中数控股份有限公司.HNC-21M世纪星铣削数控装置操作说明书,2001.6
[13]武汉华中数控股份有限公司.HNC-21连接说明书,2001.6
[14]武汉华中数控股份有限公司.华中HNC-21T3M3数控装置连接与调试说明书,2010.11
[15]武汉华中数控股份有限公司.世纪星铣床数控系统编程说明书,2009.2
[16]郑州控信科技有限公司.多功能数控综合实训系统实训指导书,2011.6
[17]I1ANGUANG LI, Y1NGXUE YAO, JING WU.A Novel Training System for NC Machining[J].Computer applications in engineering education ,2011, 19(3)
[18]YINGXUE YAO, IIANGUANG LI, CHANGQING LIU.A Virtual Machining Based Training System For Numerically Controlled Machining[J].Computer applications in engineering education ,2007, 15(1)
[19]张志军,柳文灿.数控机床故障诊断与维修[M].北京:北京理工大学出版社,2010.7
[20]杨中力.数控机床故障诊断与维修[M].大连:大连理工大学出版社,2009.4
[21]向晓汉.电气控制与PLC技术[M].北京:人民邮电出版社,2012.9
[22]周文玉,等.数控加工技术[M].北京:高等教育出版社,2010.5
[23]尹昭辉,冯金冰.基于FANUC 0i Mate-TD系统数控维修实训台的设计与实现[J].机电工程技术,2013,10(42):34-36,83
[24]王建立,张孝三,杨小荣.基于不同伺服系统的数控实训装置的研发[J].机械设计与制造,2008(7):126-128
[25]李红,张秀红.数控系统原理及故障诊断综合实训系统的开发[J].机电一体化,2011(11):94-96
[26]汪彬,张龙.一种新型的数控维修实训设备的研制与开发[J].制造技术与机床,2010(12):71-74
[27] 曹健.实训中心数控机床社会化维修模式的探索与实践[J].制造技术与机床,2012(11):114-116

摘要
从整体上说,数控实训平台主要有两项设计功能:一是直观的展现典型数控设备的结构,二是可以模拟对典型数控设备的操作。结构展示功能是要构建典型的数控设备模型,直观的展现数控设备的物理结构、电气原理、信号通路、机械传动结构等内容;操作功能包括数控设备的功能性操作、设备组装操作和信号(数据)检测操作等项目。
项目设计的数控实训平台的硬件分包括三大部分:分别是数控系统电气控制操作台、铣床机械光机和机械运动检测仿真器。依据项目计划和申报材料,装置采用华中HNC-21M3数控装置作为目标数控系统的核心,采用三轴数控铣床(加工中心)作为数控实训目标模型,并采用型号为STM32F405ZG的ARM Cortex-M4处理器来设计信号检测和仿真装置。
数控系统电气控制操作台一方面包含完整的数控系统的全部功能,可以模拟对真实数控铣床(加工中心)的操作;另一方面可以反映真实数控铣床(加工中心)的电气控制系统结构,可以模拟组装调试数控设备的电气控制系统。铣床机械光机相当于一台铣床的模型,数控实训平台选用的铣床机械光机用于展示数控铣床的机械结构和运动过程;机械运动仿真器是与机械光机并行使用的设备,是机械光机功能的软件化、虚拟化设备。
关键词:数控系统,实训平台,电气控制操作台,机械光机
“基于华中数控系统的数控原理实验平台”可以协助高等院校和职业培训机构,加设数控故障诊断维修技术的相关课程,提高相关课程的教学质量。数控机床原理维修技术本身并不复杂,只是入门较困难,需要借助比较直观的教学工具。通过该平台,可以使学员较为全面、直观的了解数控机床的电气连接、机械机构和的运行原理。并以此为基础,得知数控机床的故障原因和维修方法。通过该平台开设数控故障诊断维修技术的相关课程,既可以培养专门的数控维修人员,更重要的是可以使数控加工操作人员也具备一定的数控故障维修常识和系统参数设置技能,可以做到平时用机床,坏时修机床。这样的人才一定更受企业欢迎。
2 数控系统分析
通常将数控设备电气控制系统中能够进行解析数控加工代码、进行数控插补运算、输出运动指令的电子装置称作数控系统,该装置是数控设备电气控制系统的核心;有时也将整个电气控制系统称为数控系统,数控系统包含能够进行数控运算的电子装置和进给驱动器、PLC和人机界面等。为了加以区分,下文将能够进行数控运算核心装置称作数控装置,将包含数控装置、驱动器、PLC、人机界面等装置的系统整体称作数控系统。
3 数控实训平台整体构成和功能设计
从整体上说,数控实训平台设计主要有两项功能:一是直观的展现典型数控设备的结构,二是可以模拟对典型数控设备的操作。结构展示功能是要构建典型的数控设备模型,直观的展现数控设备的物理结构、电气原理、信号通路、机械传动结构等内容;操作功能包括数控设备的功能性操作、设备组装操作和信号(数据)检测操作等项目。
项目设计的数控实训平台的硬件包括三大部分:分别是数控系统电气控制操作台、铣床机械光机和机械运动检测仿真器。
依据项目计划和申报材料,装置采用华中HNC-21M3数控装置作为目标数控系统的核心,采用三轴铣数控机床作为数控实训目标模型,并采用型号为STM32F405ZG的ARM Cortex-M4处理器来设计信号检测和仿真装置。
3.1 数控系统电气控制操作台
数控系统电气控制操作台一方面包含完整的数控系统的全部功能,可以模拟对真实数控铣床(加工中心)的操作,包括编写加工代码和PLC程序、模拟加工、进行系统设置等;另一方面可以反映真实数控铣床(加工中心)的电气控制系统结构,可以模拟组装调试数控设备的电气控制系统。构成数控系统电气控制操作台的主要元件有:一台华中HNC-21M3数控装置、三台华中HSV型伺服控制器、三台GK60401-6AF21-FE(FB)型永磁式交流同步电机、一台FR—E720—0.75K型(三菱)变频器、一台Y80M1-4异步电机,以及辅助电机和外围的电气开关(阀)元件等。
实训装置采用模块化设计,整体结构由安装在一个包含供电系统的台体框架上的各个功能模块构成,不同功能模块有相似的外形尺寸和安装孔,同种供电类型的功能模块可以互换。每台实训装置可以安装的功能模块有:一个数控装置模块、一个继电器交换模块、三个伺服进给模块、一个主轴模块、一个刀库模块、一个辅助设备模块。模块之间的连接线分为两类,一类是供电回路,另一类是信号回路;其中供电线路回路由模块与母体框架之间连接,模块之间不能互联;而信号线可在模块之间按照数控系统电气原理相互连接,构成连接关系清晰的数控电气控制系统。由于华中系统控制信号是开放的,故所有电源线和控制线都可由使用者在外部采用带连接器的导线连接(需要考虑差分信号和共地信号的信号质量)。
3.1.1 母体框架
台体框架内的供电系统应包含功能模块可能用到的多种电源,包括直接来自外部的三相380V交流电源、来自伺服变压器的三相220V交流电源、来自控制变压器的单相220V和24V交流电源,以及两个来自开关电源的24V直流电源。供电系统还包括每一路电源的支路开关和总开关。这些电源以总线的形式贯穿整个台体,分布在台体上的各个功能模块可以从合适的电源线上取电。
3.1.2 功能模块
共计划建造六种功能模块,分别是数控装置模块、继电器交换模块、伺服进给模块、主轴模块、刀库模块、辅助设备模块。
(1)数控装置模块
数控装置模块需要提供24V直流电源。数控装置模块内安装数控装置,数控装置模块正面是数控装置的LCD显示器、系统键盘和机床面板,方便在上面进行数控装置基本操作。数控装置背面是各种连接器,包括PLC端子、伺服接口、主轴接口等,也应从模块正面引出,方便用户进行系统连接。
(2)继电器交换模块
构成继电器交换模块的主要元件是继电器、接触器和LED指示灯。继电器交换模块的主要功能是将数控装置PLC输出点直流24V的开关量信号隔离并转换为各种负载的驱动电力,以及将各种输入信号转换为数控装置PLC输入点所能识别的24V直流开关量信号,并用指示灯指示这些信号。继电器交换模块需要供给24V交流电和除数控装置模块以外的另一个24V直流电。
(3)伺服进给模块
每个伺服进给模块包含一个伺服驱动器和一个对应的伺服电机。伺服进给模块需要供给三相220V交流电源和24V直流电源。伺服驱动器上的各个信号接口应从模块正面引出,方便用户进行系统连接。
(4)主轴模块
一般与华中HNC系统对应的数控机床主轴采用变频器和异步电机,也有采用伺服驱动器和同步电机。装置中每个主轴模块包含1个变频器和一个对应的异步电机。变频器的模拟电压控制信号端口和开关量控制端口从模块面板上引出,方便用户进行系统连接。
(5)刀库模块
为了模拟加工中心的工作过程,特在装置中设计了一个刀库模型,可模拟一个简单的旋转式刀库的工作过程,刀库由PLC输出点控制,并有位置检测元件,可向PLC输入反馈信号。刀库的控制信号端子和反馈信号端子都由面板上引出。
(6)辅助设备模块
为了与装置的第三部分机械运动检测仿真器连接,代替机械部分模拟机床的运动、换挡等过程,特设计辅助设备模块。辅助设备模块主要包括安装在主轴模块、伺服模块等部件的电机上的转动检测元件、转速显示器、与PLC连接的换挡信号输入点、传动比输入按键等,可以按照设置的传动比和换挡关系,模拟显示工作台和主轴的实际移动速度和位置,并且具有信号转换功能,可将采集自电机轴的信号转换为总线信号,方便与机械运动检测仿真器连接。
3.2 铣床机械光机
铣床机械光机相当于一台铣床的模型,数控实训平台选用的铣床机械光机用于展示数控铣床的机械结构和运动过程。一般的铣床机械结构相当复杂,但在数控铣床上由于大量采用了传动套件,结构相对较简单,提高了传动精度,并且方便展示运动过程。
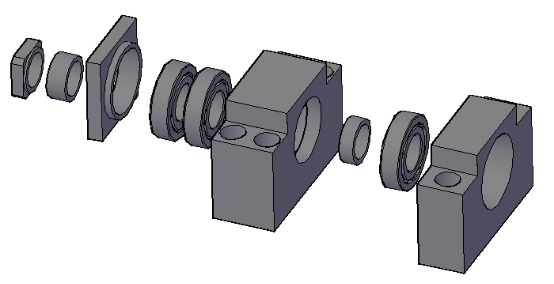
铣床机械光机的构成分为支撑部件、传动部件、连接零件等几类。支撑部件有底座、立柱、工作台等,用于构成机床床身,安装各个传动部件;传动部件有直线传动部件、旋转传动部件、主轴部件等,直线传动部件用于驱动工作台做x、y、z向直线运动,旋转传动部件用于驱动工作台做A、B、C向回转运动,主轴部件用于支撑主轴和主轴传动;传动部件和支撑部件通过连接零件安装,连接零件包括各种连接标准件。
铣床机械光机由电机和各种电液动元件驱动,并通过各种检测元件向数控系统反馈信号,电机、电液动负载和检测元件是连接数控系统和机械光机的桥梁,其中电机受数控装置控制的伺服驱动器的驱动,开关量信号负载和检测元件通过开关元件与数控系统PLC连接。
铣床机械光机需要展示机床运动过程,与数控系统的输出信息相应正。为了简化结构,方便展示,光机应大量采用运动部件,总体尺寸较小,方便拆卸,并采用较小功率的伺服电机和主轴电机。光机上安装的电气动负载和走线也应清晰展示,并用指示灯指示开关量信号。
3.3 机械运动仿真器
机械运动仿真器是与机械光机并行使用的设备。机械运动仿真器包括铣床光机在内的多种机械光机的功能,是机械光机功能的软件化、虚拟化设备,同时又能精确显示这种虚拟运动的量值,以及模拟真实机床与数控装置交换的其他各种信号。
机械运动仿真器以ARM Cortex-M4处理器为核心,由电子线路及其内部运行的嵌入式软件构成。电子线路包含ARM处理器、7寸显示器、按键、输入输出接口、电机轴转动检测元件等。装置通过按键设置所仿真的机床类型、工作台尺寸、进给轴传动比、主轴传动比、主轴换挡信息以及其他开关量检测元件和负载的类型等,通过按键设置可将该装置虚拟为一台具体的机床;7寸显示器用于显示装置所虚拟的机床的具体形象,以及相关数值和参数、信号等;输入输出接口用于与数控装置PLC接口相连,虚拟数控装置所控制的刀库、限位开关、换挡电磁离合器等机床开关量元件或负载。电机轴转动检测元件用于检测进给电机和主轴电机的转角或转速,将进给电机实际转动信息输入装置,可虚拟出对应机床的工作台位置,并显示在液晶屏;同时得到主轴电机的转速转向也在液晶屏显示。另外为了扩大机械运动仿真器的应用范围,也可绕开实际电机,直接与数控装置的伺服轴接口和主轴接口连接,通过接收数控装置输出的伺服信号,结合预设的倍率信息,得到对应的虚拟机床工作台速度和位置;通过接收数控装置输出的主轴模拟控制信号,得到对应的虚拟机床的主轴转速和转向。
机械运动仿真器的主要功能有两个,一个是灵活演示与数控装置对应的机床运动,虚拟机床的工作过程;另一个功能是检测数控装置故障与信号质量,通过虚拟机床运动过程,检测数控装置输出信号的正确性。
4 数控实训平台电气控制系统设计
数控实训平台电气控制系统依照华中HNC-21数控装置的典型电气控制系统,采用模块化结构进行设计,既要实现数控电气装置基本功能,又能展示其基本结构和连接关系。本部分内容首先介绍华中HNC-21M数控装置的典型电气控制系统,再基于此系统,设计数控实训平台电气控制系统各模块电路,最后设计其机械结构。
4.1 基于华中HNC-21M数控装置的典型电气控制系统
这里将数控电气控制系统分为A电源回路、B主回路、C驱动器回路、D控制回路、E数控装置、F内装式PLC等六部分电路。
4.1.1 电源回路
电源回路负责为数控系统各模块和设备供电。整个系统中共有4种电源,分别是三相380V电源、三相220V电源、单相220V电源、直流24V电源。其中24V直流电源为数控装置本身和PLC输出端子供电,为了避免不同负载之间相互干扰,数控装置和PLC负载需要采用不同的直流24V电源供电,该电源通常为开关电源模块;单相220V电源由控制变压器产生,可为提供直流24V的开关电源供电,起到隔离作用,同时还可以为额定电压为220V的接触器线圈供电。有些场合也会使用单向110V交流电源,采用110V输入的开关电源和接触器;三相220V用于伺服驱动器供电,伺服驱动设备通常使用三相220V供电,由三相变压器外接380V三相电源产生,同时可以起到与外380V电源隔离的作用。三相变压器容量由伺服电机功率决定,变压比通常为1:1,输入采用星形接法,输出采用三角形接法,可由380V产生220V三相电源。三相380V电源由外部直接引入,为异步电机等负载供电,或为变频器供电。电源电路总、分开关采用低压断路器,干线和每个支线均采用断路器分隔。
图4-1 电源回路
4.1.2 主回路
主回路包含除伺服电机和主轴电机之外的其他三相负载,一般为数控机床上的辅助电机,包括驱动刀库的电机、润滑电机、冷却电机等。其中驱动刀库电机需要正反转,采用双接触器控制,润滑电机和冷却电机只需单向转动,采用单接触器控制。接触器输出端采用浪涌吸收器吸收干路干扰,每个支路前端都加独立的断路器,方便故障排除和修理。图4-2 主回路
4.1.3 驱动器回路
驱动器回路包括主轴电机驱动回路和伺服电机驱动回路。其中主轴驱动器通常采用变频器,主轴电机采用异步电机。主轴供电电压依据变频器和电机的额定电压,通常是三相380V供电,变频器功率与电机容量一致。三相380V供电输入端连接接触器,保证在主轴未使用或有故障时能够与电源断开。变频器输入端连浪涌吸收器和电抗器,防止浪涌损坏变频器,也防止变频器干扰其他设备。变频器输出端连接主轴电机。变频器主要控制信号是模拟电压,模拟电压来自数控装置主轴控制端口,电压大小可通过变频器决定主轴转速,除模拟电压外,还有一些开关量控制信号,这些信号决定主轴启停、正反转、速度等级等。这些信号来自数控装置PLC输出端,由数控装置PLC程序控制,决定变频器工作状态。若主轴需要具有位置控制功能,如主轴准停等,则需要在主轴上安装旋转编码器等位置检测元件,旋转编码器输出的脉冲信号(A、B、Z)应连接至数控装置主轴控制端口(与模拟电压在同一端口),将主轴位置信息反馈至数控装置。图4-3 主轴电机驱动电路
伺服电机驱动回路包括伺服驱动器和伺服电机。伺服电机类型、功率、速度反馈信号和反馈接口应与伺服驱动器一致。常见伺服驱动器为三相220V供电,供电由伺服变压器产生。电源与伺服驱动器之间接入接触器,保证在伺服未使用或故障时能够与电源断开。伺服驱动器输入端也要接入浪涌吸收器和电抗器,防止浪涌损坏伺服驱动器,也防止伺服驱动器干扰其他设备。伺服驱动器输出端连接伺服电机,电机速度反馈信号连接至伺服驱动器相应端口。伺服驱动器主要控制信号是速度控制脉冲和方向控制脉冲,速度控制脉冲频率决定伺服电机转速、方向控制脉冲决定伺服电机转向,这两个信号来自数控装置伺服控制端口,为了保证传输距离信号以差分形式传输,每个信号占用两根导线。除脉冲信号外,伺服驱动器还有一些输入输出开关量信号端子,依据伺服驱动器型号的不同,开关量输入信号有使能、电机轴锁定、释放等,开关量输出信号有状态、故障报警等,这些信号分别与数控装置PLC输出点和输入点相连,通过PLC程序控制伺服驱动器工作状态,并接收伺服驱动器状态反馈执行相应动作。若系统为全闭环控制,机床上安装有光栅尺等位置控制元件,则将光栅尺输出的脉冲信号(A、B、Z)连接至数控装置伺服控制端口(与该轴速度脉冲、方向脉冲在同一端口)。对于三轴数控铣床,则包含三个相同的伺服电机驱动回路,这三个伺服电机驱动回路共用同一个伺服变压器和接触器,但需要分别安装电抗器。
5 数控实训平台机械光机设计
数控实训平台中配套使用的光机,实际上是一台简化的机床模型。该装置能够清晰的展示机床的运动过程,观察电气控制装置输出的各种信号在光机上对应的运动过程,直观、定性的印证电气控制装置输出的信号的正确定,与电气控制装置配合使用,可以达到较好的教学、科研效果;同时机械光机也可以作为数控装置及系统的检测装置,验证数控装置输出信号的正确性,运动精度和驱动力等要素;光机若与装置整体的第三部分——机械运动仿真器结合使用,可以同时定量的显示这些要素,达到更好的使用效果。
这种机床模型的设计要点是:结构简洁、运动过程直观;运动精度需求较高;整体需求尺寸较小;结构尽量简单简单、零件数量较少,便于加工;光机上的电机及其他电气零件便于拆卸更换。
由于项目采用HNC-21M3铣数控装置设计电气控制装置,固在本章中设计三轴(第四轴可选)铣床机械光机。
7 实施和结论
7.1 项目实施
数控实训平台的研制经过了三个阶段,分别是基础调研和选型阶段、设计定型阶段、施工测试阶段,整个过程历经两年。7.1.1 基础调研和选型阶段
经过2013年春季立项工作,确定研制一款用于数控系统实训的装置后,研究团队随即开始进行实训装置基础调研和数控装置选型。工作重点分别是:1、研究各种主流数控装置及其系统的特点,2、研究各大教学仪器生产厂家设计生产的数控系统实训。3、确定目标数控装置型号。这个阶段持续了6个月,从2013年的3月一直进行到2013年9月底。1)着重研究分析了FANUC 0iD数控系统、SIEMENS 802D数控系统,和国产广数GSK983数控系统和华中HNC-21数控系统等几种常见数控系统,分析了这些数控系统的系统特点、拓补结构、关键部件、应用状况等情况。研究发现FANUC 0iD系统和SIEMENS 802D系统中各部件专用性较强,连接关系较为固定,硬件连接不灵活。这种系统可靠新较好,但缺乏互换性和元件通用型,基于这些系统研制硬件装配实训平台价值不大,且这类系统生产厂家售后服务系统较完善,基于使用者的装配修理技能的需求并不迫切。而广数GSK983数控装置和华中HNC-21数控装置为硬件开放的数控装置,数控装置对与之连接的其他元件并无限制,通信信号也是开放的。这类数控装置使用较灵活,可硬选配不同厂家不同性能的驱动装置和电机,数控系统电路构成较复杂,对使用者的装配修理技能的需求较迫切。故选用华中HNC-21数控装置为研究对象,研制数控实训装置。
2)研究分析了浙江天煌生产的THWLDH-1型华中数控车床实训平台,THWMDF-1型FANUC 0iC数控铣床实训平台,以及郑州控信生产FANUC 0iD数控实训平台等产品的设计要点。研究发现控信平台偏重软件设置,用户不能自由进行系统连接,而天煌平台偏重连接关系实验,但实验设施的特点过于明显,与现实中的数控电器柜的样式区别较大。经研究决定,应研制一种既能方便进行硬件装配和软件设置,又采用真实数控系统电气元件和布局的实训装置。
7.1.2 设计定型阶段
设计定型阶段是项目研制的主要阶段,这个阶段进行了一年,从2013年9月一直持续到次年9月。主要的研究成果是:1、基于华中HNC-21系统的典型电气控制电路。2、数控实训装置电气控制系统的结构设计和定型;3、数控实训装置电气控制系统各模块的结构设计和电路设计;4、铣床光机的主要元件选型;5、铣床光机的结构设计和定型。首先进行华中HNC-21系统的典型电气控制电路设计,这是该阶段的基础性工作,目的是为实训平台的设计和使用提供依据。这项工作以华中提供的连接说明书为主要参考,进行了大约1个月。实训装置电气部分的结构设计,进行了月三个月。根据前期设计要求,装置既要整体上具备真实机床电气柜的元件结构和形式,又要方便进行电气连接和软件设置实验,因此采用可互换的模块化设计,并花费了大量精力,在细节和感官效果上满足这些要求。之后是长达六个月具体设计,从整体结构到每个工模块的的结构设计,以及电路设计都一一完成,最终确定每一个电路元件的参数选型、每一个器件的安装尺寸,和每一个面板的丝印图样。光机设计工作也在另一个团队中同时进行,由于光机采用了大量传动套件,套件和零件选型十分重要,所以首先用时一个月进行铣床光机的主要元件选型,之后是长达六个月的光机详细结构设计和校核。实训装置电气部分和结构部分基本设计完成后,又花费了月三个月继续各项图纸的核对和整理。
7.1.3 施工测试阶段
设计施工阶段从2014年6月,即实训装置电气部分设计基本完成时开始,一直进行到2015年年初。首先进行华中HNC-21数控装置和伺服驱动器、变频器、电机等外围期间的订购,并同时采购断路器、继电器、接触器、开关等电气元件。绘制工程图纸,定制实训装置电气柜台体框架、模块框架等结构件,丝印各模块面板。这个过程持续了约1个月。各项器材到位后,开始进行实训装置电气部分装配。首先装配各个功能模块,每个模块装配完成后后要单独进行通电调试。同时分配人员进行数控装置模块的参数调试和PLC程序调试。待所有模块调试完毕后,再进行总体装配调试和装置试运行,这个过程持续了约4个月。7.2 结论
7.2.1 项目创新点
项目实施过程中,在数控实训装置结构、功能和原理性设计等方面存在若干创新点。(1)结构方面
数控实训装置既非传统的插线式电气实验设备的样式,又非真实数控机床上的电气柜样式,而是结合两者特点而成的模块插线式电气柜样式。传统的插线式电子电气试验台比较抽象,注重反映电路原理,缺乏电路元件和布局特点直观影响,而真实的机床电气柜难以进行连接试验;该数控实训装置结构上的创新点在于既有真实设备的样式,又能方便进行连接试验。为了实现这种设计,装置采用模块化结构,将数控电气系统的不同功能单元、以及相对固定的连接关系做成模块;将与软件、配置和功能实现有关的硬件连接,由使用者通过进行实验来完成。既能直观的、真实的反映数控电气系统结构,观察相对固定的电路原理,又能方便使用者练习、连接电路设计。
(2)功能方面
数控实训装置的功能的创新点在于综合性。基于模块化设计、采用真实元件构成、使用者自由连接等结构特点,装置可以作为一项多功能教学科研仪器,实现原理性教学、实践性教学、和数控故障检测仪器等三方面功能,涉及电气控制与PLC、数控电气原理、数控故障诊断维修等多门学科,以单一设备围绕“数控”这一中心概念而涵盖机电一体化专业大部分应用课程,同时还可以作为数控装置外围功能开发设备和数控装置以及外围器件故障诊断设备使用。
1)装置电气部分整体就是一套典型的(机床)电气控制系统,上面包含几乎全部常见低压元件,可以进行基本控制电路连接,用于电气控制与PLC课程的教学和实验;
2)装置电气部分可以搭建数控机床典型控制系统,反映数控电气控制原理,实现数控电气控制过程,同时结合机械光机部分,可以模拟数控机床运动过程。将能够应用于数控电气原理课程,实现电路、机械、数控参数、PLC编程、加工编程、数控机床操作等多方面实验功能。
3)装置电气部分可以在连接上模拟数控系统上多种不同故障,用于数控故障诊断维修课程的教学和实验,直观的了解不同故障对应的不同现象。
4)装置可以作为科研设备使用,开发数控装置外围电路。以装置上安装的数控装置为核心,试验搭建外围电路(如刀库控制),编写PLC程序,并在装置上试运行,并结合光机部分模拟整体运行,又避免在真实机床上进行测试的风险,开发数控装置外围电路和程序。
5) 由于装置采用模块化设计,可以将被测数控器件(如数控装置、伺服驱动器等)安装在相应模块上,搭建系统,利用装置上的其他正常的硬件进行故障判断和检测。
(3) 设计原理方面
数控实训装置的原理性创新在于对现有数控系统硬件结构的归纳总结,使依照此原理设计的装置具有更广泛的适用性。虽然不同的类型数控装置之间、同类型不同型号的数控装置之间、以及同型号数控装置在不同的应用场所之间都存在差异,但共性的部分是存在的。项目通过对不同数控装置、以及同种数控装置不同应用方式的研究,归纳出这些应用系统的共性,将其设计为数控实训装置电气部分的母体框架和固定线路;同时归纳出这些应用系统上个性化、参数化、软件化的部分由使用者自行搭建。所以通过该实训装置可以使用不同的数控装置,并设计出该数控装置的任意一种应用形式。
7.2.2 改进升级
目前该数控实训装置分机械光机和电气试验台两部分,仅由硬件构成,缺乏计算机信息化元素,这在使用灵活性、深入扩展应用以及安全性上有一定的不足。未来可以引入第三部分——计算机虚拟实验辅助系统,实现电气实验台、机械光机和计算机虚拟实验辅助三部分并行运行。通过在机械光机、电气实验台电机轴以及重要开关器件上安装传感器,将传感器信号通过采集器引入计算机,通过编写运行计算机软件,虚拟机械光机和电气试验台工作状态,并起到连接提示、错误警示、运行状态显示等作用,可以直观的指导连接试验、故障检测试验,以及数控系统搭建的辅助设计作用。同时还可以通过计算机网络,实现远程实验的概念。参考文献
[1]李金伴.数控机床故障诊断与维修速查手册[M].北京:化学工业出版社,2008.12[2]《数控机床维修技师手册》编委会.数控机床维修技师手册[M].北京:机械工业出版社,2006.1
[3]杨雪翠.FANUC数控系统调试与维护[M].北京:国防工业出版社,2010.10
[4]张爱红.FANUC数控系统链接调试与维护[M].北京:人民邮电出版社,2010.7
[5]曹智军,肖龙.数控PMC编程与调试[M].北京:清华大学出版社,2010.8
[6]吴宗择.机械零件设计手册[M].北京:机械工业出版社,2003.11
[7]闻邦椿.机械设计手册(第5版)[M].北京:机械工业出版社,2010.1
[8]隋秀凛,高安邦.使用机床设计手册[M].北京:机械工业出版社,2010.1
[9]李宏胜,朱强,曹锦江.FANUC数控系统维护与维修[M].北京:高等教育出版社,2011.8
[10]黄广文,邵泽强,韩亚兰.FANUC数控系统连接与调试[M].北京:高等教育出版社,2011.5
[11]刘江,卢鹏程,许朝山 .FANUC数控系统PMC编程[M].北京:高等教育出版社,2011.8
[12]武汉华中数控股份有限公司.HNC-21M世纪星铣削数控装置操作说明书,2001.6
[13]武汉华中数控股份有限公司.HNC-21连接说明书,2001.6
[14]武汉华中数控股份有限公司.华中HNC-21T3M3数控装置连接与调试说明书,2010.11
[15]武汉华中数控股份有限公司.世纪星铣床数控系统编程说明书,2009.2
[16]郑州控信科技有限公司.多功能数控综合实训系统实训指导书,2011.6
[17]I1ANGUANG LI, Y1NGXUE YAO, JING WU.A Novel Training System for NC Machining[J].Computer applications in engineering education ,2011, 19(3)
[18]YINGXUE YAO, IIANGUANG LI, CHANGQING LIU.A Virtual Machining Based Training System For Numerically Controlled Machining[J].Computer applications in engineering education ,2007, 15(1)
[19]张志军,柳文灿.数控机床故障诊断与维修[M].北京:北京理工大学出版社,2010.7
[20]杨中力.数控机床故障诊断与维修[M].大连:大连理工大学出版社,2009.4
[21]向晓汉.电气控制与PLC技术[M].北京:人民邮电出版社,2012.9
[22]周文玉,等.数控加工技术[M].北京:高等教育出版社,2010.5
[23]尹昭辉,冯金冰.基于FANUC 0i Mate-TD系统数控维修实训台的设计与实现[J].机电工程技术,2013,10(42):34-36,83
[24]王建立,张孝三,杨小荣.基于不同伺服系统的数控实训装置的研发[J].机械设计与制造,2008(7):126-128
[25]李红,张秀红.数控系统原理及故障诊断综合实训系统的开发[J].机电一体化,2011(11):94-96
[26]汪彬,张龙.一种新型的数控维修实训设备的研制与开发[J].制造技术与机床,2010(12):71-74
[27] 曹健.实训中心数控机床社会化维修模式的探索与实践[J].制造技术与机床,2012(11):114-116
目录
目录 2
摘要 I
Abstract II
1绪论 1
1.1数控系统的应用现状 1
1.2数控设备的应用现状 2
1.3数控设备故障分析 3
1.4 数控设备故障诊断维修的教学和培训 3
2 数控系统分析 5
2.1 数控装置 5
2.1.1 硬件构成 5
2.1.2 功能 6
2.2 进给驱动器及电机 9
2.2.1 进给电机 9
2.2.2 进给驱动器 11
3 数控实训平台整体构成和功能设计 12
3.1 数控系统电气控制操作台 12
3.1.1 母体框架 13
3.1.2 功能模块 13
3.2 铣床机械光机 14
3.3 机械运动仿真器 15
4 数控实训平台电气控制系统设计 17
4.1 基于华中HNC-21M数控装置的典型电气控制系统 17
4.1.1 电源回路 17
4.1.2 主回路 18
4.1.3 驱动器回路 19
4.1.4 数控装置及其内装式PLC 21
4.1.5 控制回路 26
4.2 数控实训平台模块设计 27
4.2.1 电源模块和电源走线板 28
4.2.2数控装置模块 29
4.2.3继电器模块 31
4.2.4 进给模块 32
4.2.5 主轴模块 34
4.2.6 辅助设备模块 36
4.2.7 行程开关模块 37
4.3 整体安装和应用 38
5 数控实训平台机械光机设计 39
5.1 元件选型 39
5.1.1 进给电机 39
5.1.2 主轴电机 40
5.1.3 导轨滑块 40
5.1.4 滚珠丝杠螺母 41
5.1.5滚珠丝杠轴承座 41
5.1.6 主轴部件 42
5.1.7数控分度头 43
5.2铣床机械光机结构设计 44
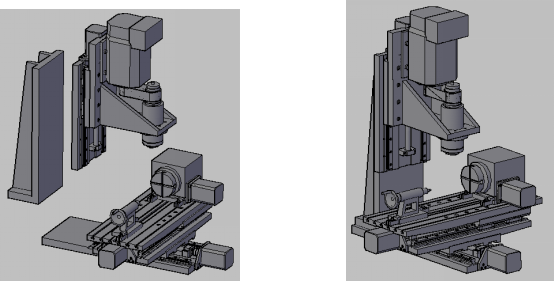
5.2.1 整体设计 44
5.2.2 Y直线传动部件 44
5.2.3 X直线传动部件 47
5.2.4 A回转传动部件 48
5.2.5 Z直线传动部件 49
5.2.6 主轴传动部件 49
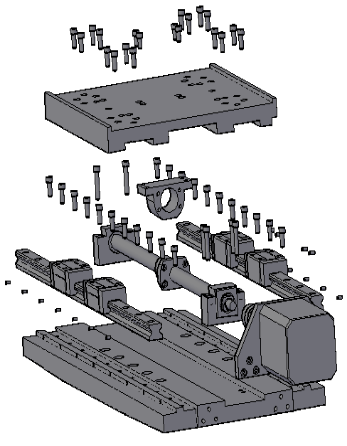
5.2.7 整体装配 50
6研究经费的使用与管理 53
6.1 研究经费的来源与主要开支范围 53
6.1.1 研究经费的来源 53
6.1.2 研究经费的主要开支范围 53
6.2 研究经费的预算与使用情况 54
6.2.1 研究经费的预算情况 54
6.2.2 研究经费的使用情况 55
6.3 研究经费的管理 56
7 实施和结论 57
7.1 项目实施 57
7.1.1 基础调研和选型阶段 57
7.1.2 设计定型阶段 58
7.1.3 施工测试阶段 58
7.2 结论 59
7.2.1 项目创新点 59
7.2.2 改进升级 60
参考文献 62