














��ICP��112451047180��-6
����������PLC�������ɶ�Һѹ��е���������̬����
ժҪ
���Ŀǰ�����Ϲ��ڻ�еװ���Լ��ɱ�������������з������δ������ȷ�������ĵ��о�Ŀ���Dz���Һѹ������4�����ɶ�����µĻ�е�֡�
���������ֻ�е�ֵĴ��ʣ����Ʒ��㣬�ٶȿ���ص㣬���ڹ�ҵ�������еõ��ܴ���ƹ㡣����װ���Ƿdz���ȫ�Ļ���һ�廯�����ּ���ģʽ���õ���ѧ����Ҫ��Һѹ���Կ��Լ���е��Ƶ����ݡ�������������������������ʹ�õص��Լ���Ҫ�ṹ��Ȼ��������������Ҫ������Һѹϵͳ�����ۣ���Ҳ�ǹؼ��Ŀ��Ʋ���֮һ�����ֻ�еװ����Ҫ���ÿɱ�������������жԵ�ŷ��İѿأ������ܹ��������ֻ�еװ�õ�ÿһ���������ڵõ����ֻ�еװ�õ������Լ����������Ҫ���п���ϵͳ��ѡ�ͣ��Լ���ѡ����Ϣ�ռ����õ��ı�������ѡ���ؿɱ�����������ĵ�ַ������������ϵ�ĵ�·�����Լ��������ơ�
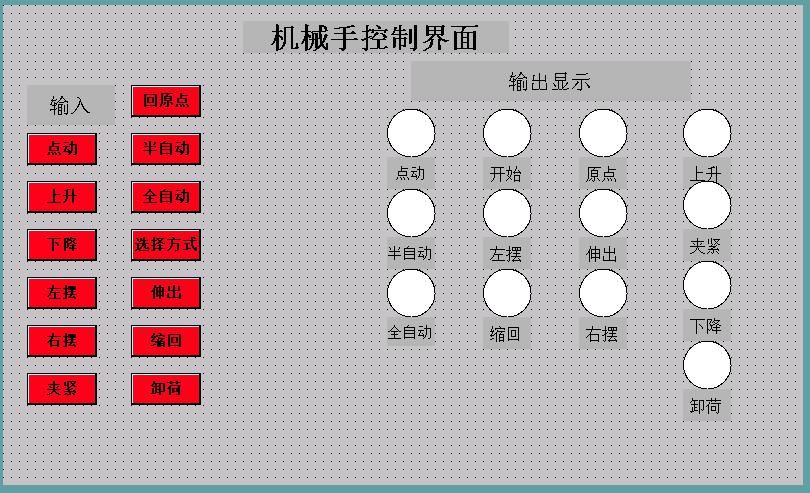
������ʹ�������ɶ�Һѹ��е����Ϊ������ò����ڵ¹�SIEMENS��˾�Ŀɱ�����������Լ���Ļ��ѡ����������� 7 MicroWIN V4.0 SP3��Wincc flexible 2008���ת�������������졢�����ȶ�����
�ؼ��ʣ���е�֣� PLC�� �������� �����������ƣ� ����
Ŀ¼
��һ������ 1
1.1��������������� 2
1.2 PLC��ѡ�� 2
�ڶ��»�е�ֻ�����Һѹϵͳ���� 3
2.1��е�ֹ����������� 3
2.2��е�ֻ������� 4
2.3��е��Һѹϵͳ���� 5
2.4��е�����ʱӦ���ǵļ������� 6
2.5������ 6
�����»�е�ֿ���ϵͳ��� 7
3.1��е�ֶ������� 9
3.2����ѡ�� 12
3.3PLC���Ƶ�·����� 18
3.4������ 21
������PLC����ϵͳ�������� 22
4.1�ܳ������� 22
4.2��ԭ��������� 23
4.3�㶯�������� 27
4.4�Զ��������� 28
4.5�������������� 30
4.6������ 31
������ ��������빦��ʵ�� 32
5.1������S7-200��ͨѶ 33
5.2 PLCͨ�� 33
������ �ܽ���չ�� 34
6.1�ܽ� 34
6.2չ�� 34
��л 35
����� 36
��¼ 51
1����
1.1���������������
Ӧ�ù�ҵ��Χ����Ļ�е����Ϊһ���������������Ѿ����ִ�������ı�־��֮һ�����ֻ�еװ�����ھ߱��dz��õĴٽ����ܣ��ܵ��dz�����˵Ĺ�ע����һ����е�������ܹ���ijЩ��������˹����ڶ������ݲ�ͬ�Ĺ����ص㣬��ɲ�ͬ������ʱ�ͻ������ܹ����Ź����ı仯���仯������ܹ������˹����һЩ����ɵĹ�����
ͨ����������������Ƿ������ֻ�еװ���ܹ���߹���Ч�ʣ������˹��ɱ������ƹ�����������߹�ҵ�����Ļ�е���̶ȡ��ڹ�ҵ��չ�dz�ǿʢ�Ĺ��ң���ҵ��еװ�õ�Ӧ�÷dz��㷺���������ڹ��������ر���ӵĻ����£����¶Ⱥܸߡ�ѹ���ܸߡ������ܴ�ȡ�
���ڹ�ҵ���̶ȵIJ��ϸ��£��ִ����Ĺ�ҵ�����Ѿ����뵽�쳵������е����װ�õ�Ӧ��ҲԽ��ԽƵ��������Ŀ��Ʒ�������̵����ķ�ʽ����������ܶ����Կ��Ƶ����⣬��ṹ���ӡ���ȫ�Բ��á���·���ҡ����׳����ȡ���������������������Ǽ���һ�ְ�ȫ�ɿ���ȷ��Ч�Ŀ�����ϵ�������ֱ����£��ɱ����������Ӧ�˶���������������������⣬����ά�������ù���Ч���������£�1����
Ȼ�������һ��ʱ�䣬�DZ������ʹ�����Ԫ��Ϊ��ӵ�еĹ�����Ҫ���������ѧ���㡢����Ԥ�⡢������ϵ����ʵ��ȷ�ı����Ǹ��˵��ԡ�������������������˵��ԣ���֮ΪPLC��
PLC����������Ҫ�ŵ㣺
��1��Ӧ�÷��㣬��Ӧ��ǿ
����Ҫ���п��Ʊ仯��ʱ��ֻҪ���г����Լ�����ȥ��ɡ�
��2����ȫ��Ч���ȶ�ȷ
����Ӳ��������棬�ʹ��������ò��ýӴ��ķ�ʽ���е�·��ƣ����ð뵼���Լ����ģ�ļ���ʽ����Щ���͵�·��������ɡ����������봦�������ڽ������������ʱ����Ҫ���з��룬��Ҫ���ù����뼼��ȥʵ�֡�
��������������棬������Ʊ����ļ���������ܹ�ʵ�ֿ����Ų�ѯ�Լ�����Ӱ�����ص��Ų顣������ֹ��ϣ����Ὣ״̬���浽�ڴ沢�ر����Խ�������ά����������ʵʱ�鿴��Ҳ���dz�˵�Ķ�ʱ����ͬʱ��ѯ�����Ƿ����������ڵ������Խ�������������ʱ�������ʾ�����������IJ�ѯ��һ�����ִ����ʱ�ͻ�����Ļ�ϳ�����ʾ��Ϣ��ͬʱ�Զ���ֹ����
��3��Ӧ�÷���
Ӧ�õij��������dz��������ͼ���ԣ����ַ������ص����������֣��ķ��㡣���������뷽�棬����������棬���ܹ�ͬ��һ�����豸�ӿڽ������ӣ����������dz���ݡ�
��4������ǿ�����С
������ȫ����������ָ�����Ҫ��ͬʱ�ܹ�����ģ�����㣬����ģ��/���֣�����/ģ��ת�������ֲ��������ɽ���������ݵĴ��������ּ�����ȫ�ܹ��Զ������ͬʱ�������ܹ�������ߵ�Զ�̴�����ͬʱ��Ӳ��������С������㣬��װ�ܱ�ݡ�
������ʹ�ü����Լ���Ļ��ʾ�������л�еװ���ڹ���ʱ�IJ������ܹ�ȷ������ʱ�İ�ȫ��Ч�������˹���ʱ����߹���Ч�ʣ��������̣��߱���ǿ����ʵ���á�
�����
[1]��ΰ ������.��е��PLC����ϵͳ�����[J] .2008��
[2]����.����������PLCԭ����Ӧ)4J[M].���ӹ�ҵ������.2006��
[3]������.��:ҵ��е�����[M].���Ӱ�
[4]�½�.�ִ�PLC���Ƽ����뷢չ[J].2004��
[5]�½�.�¼���������PLC�ķ�չǰ��[J].2004��
[6]����ΰ.Һѹ����[M].2006��
[7]�����i.�ɱ�̿�����ԭ����Ӧ��[M].�����ʵ������.2002��
[8]������.PLCѡ��ʱ��������Բ�[J].�Ϻ���ѧ
[9] ������S7-200�����ֲ�
[10] ������PLC����ֲ�