














苏ICP备112451047180号-6
基于PLC的成品分拣装置控制系统的设计与实现
一、选题简介、意义
社会在不停的进步,各种市场竞争日趋严重,使用落后工艺的会被淘汰,所以大家想改变工艺,提高效率。我们对于自动化系统研究的比较晚,大多使用人工,导致生产工作效率低,反而成本高,所以现在各企业更加青睐自动分拣。
相比人工去分拣,自动分拣优势巨大,效率高,而且不需要人力了,实现自动化。自动分拣的相比人工准确性较高。分拣机的操作部分是设备的核心控制单元,PLC的优点是非常显著它可以直接进行驱动,操作简单且修改容易稳定性抗干扰能力强,所以本课题采用PLC来设计分拣系统。
二、课题综述
1主要任务
构建模拟工业成品分拣装置系统
2解决的主要问题
正确分辨成品目标
可以将目标已送到指定地点
3预期目标
根据项目要求可以准确分拣目标
4研究步骤
第一阶段:查阅文献,市场调研、收集资料、确定课题方案,完成开题报告
第二阶段:完成系统构架,进行结构设计程序编写
第三阶段:进行论文书写
第四阶段:整理技术资料,完成毕业设计论文及答辩。
5工作方法及措施
工作方法:本课题主要采用实验法。
措施:基于课堂学期及每学期实训所获得的实践经验,在教师指导下,以PLC与传感器为基础,设计开发成品分拣装置。
目 录
一、绪论 2
1.1 本论文的背景和意义 2
1.2机械手在世界内的发展趋势 2
1.3 分拣系统国内外发展现状和趋势 2
二、总体方案的设计 4
2.1 总体规格与相关参数 4
2.2 驱动方法的种类和挑选 4
2.3 自动化生产线机械手及分拣系统的组成 5
2.3.1 机械手的设计方案 5
2.3.2 分拣系统设计方案 6
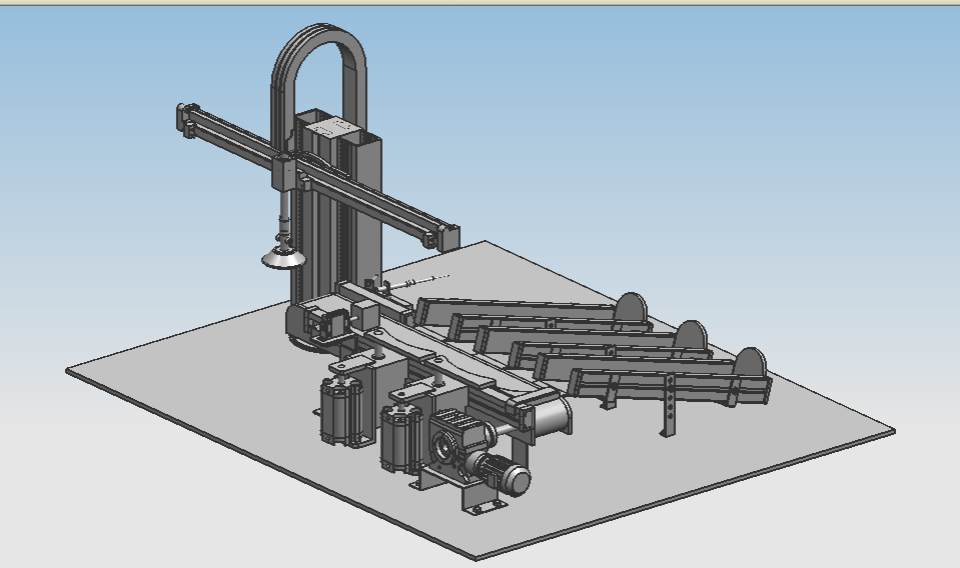
2.4 总体建模效果 6
三、分拣装置的设计 7
3.1机械手的选择 7
3.2手部的选择 7
3.3 气缸等关键部分的设计 9
3.3.1 机械手工作气缸的计算与选用 9
3.3.2 机械手横向无杆气缸的选择 16
四、分拣单元结构设计 19
4.1 分拣单元的主要组成部分及各自功能 19
4.2 输送部分设计 19
4.2.1驱动辊 19
4.2.2电动机的选定 20
4.2.3输送带的选定 20
4.3 传感器的选择 21
4.4 气缸的选用 21
4.5 滚珠丝杠螺母副的选取 22
4.6 滑槽的选择 23
五、控制系统的设计 25
5.1总体方法 25
5.1.1 PLC的简介 25
5.1.2 PLC的应用 25
5.1.3 PLC的特点 25
5.2气动控制系统的设计 26
5.2.1 机械手的动作过程 26
5.2.2 机械手的各种功能 26
5.2.3 机械手的I/O口分配 26
5.2.4 梯形图 30
5.3 分拣系统控制系统的设计 31
5.3.1 分拣系统需要完成的任务 31
5.3.2 分拣系统的I/O口分配以及PLC外部接线图 31
5.3.3 分拣系统的状态转移图 33
5.3.4 分拣系统梯形图 33
致 谢 37
参考文献 39
摘要:传统的人工分拣具有无可比拟的优势与自动材料分拣系统相比,如排序效率高,因为自动流水线操作,自动分拣系统不受气候影响,时间,人的力量和其他因素的限制可以连续运行,和单位时间排序的多,更重要的是不需要大量的劳动力来做排序工作,实现从劳动密集型转变为技术密集型生产线。同时,自动分类系统的分类错误率较低,主要取决于输入的准确性和排序信息,这也是输入机制的分类信息。携带识别设备和相关信息的载体材料中起着主导作用,这些年来在中国的应用过程中自动分拣系统,机械结构、控制方式和属性不断改进和完善。本文的设计项目完成分拣设备PLC控制系统设计和实现基于机械手自动生产线的基本要求和排序单元连接这两个单位有效。通过一系列传感器和气缸可以迅速、准确地完成任务的处理和排序。自动生产线的设计机械手和排序单元旨在通过模块的组合形式组装线的功能。
关键字:分拣装置;自动化生产线;分拣单元;分拣机械手;分拣系统;PLC控制
参考文献
[1] 王建明.自动线与工业机械手技术[M].天津:天津大学出版社.2009
[2] 郭洪红,贺继林等.工业机器人技术[M].西安:西安电子科技大学出版社.2006
[3] 王积伟,章宏甲等.液压与气压传动[M].第二版.北京:机械工业出版社.2010
[4] 成大先,王德夫,姬奎生等.机械设计手册(单行本).北京:化学工业出版社.2004
[5] 许洪基,雷光,王起龙:等.现代机械传动手册,北京:机械工业出版社,1995.
[6] 黄锡恺,郑文纬.机械原理[M],北京:高等教育出版社,1995.
[7] 郑明新.机械工程材料[M],北京:清华大学出版社,2001.
[8] 金清肃. 机械设计课程设计 [M]. 华中科技大学出版社, 2007,10.
[9] 刘鸿文.材料力学[M].第四版.北京:高等教育出版社.2004
[10] G.尼曼(德),H.温特尔(德)著.余梦生等译.机械零件[M].北京:机械工业出版社.1988
[11] 纪名刚. 机械设计 [M]. 高等教育出版社, 2006,5.
[12] 徐灏,邱宣怀,蔡春源等.机械设计手册,北京:机械工业出版社,1994
[13] 刘艳梅,陈震,李一波等编著.三菱PLC基础与系统设计[M].北京:机械工业出版社.2011
[14]Katsuhiko Ogata著,杨艳娟缩编.现代控制工程[M].第四版(英文版).北京:电子工业出版社.2007
[15] Festo. Manual_Handing & Manual_sorting[J/OL].2011.
[16] S.O. Reza Moheimani , Andrew J. Fleming. Piezoelectric Transducers for Vibration Control and Damping[DB/OL]. Springer,2006
[17] Haugen.E: Probabilistic Mechanical Design. John Wiley and Sons.1980
[18] Chin Pei Tang,Venkat Krovi.Manipulability-Based Configuration Evaluation of Cooperative Payload Transport by Mobile Robot Collectives[J/OL]. ASME Conf. Proc. IDETC/CIE2004 2004