














��ICP��112451047180��-6
���ڻ����˵��Ӿ��ּ�ϵͳ���
һ��ѡ���顢����
�������ǶԻ����˺��Ӿ����һ�廯������ʵ�ֽ��������ģ��ҷ��ֶ��ڹ�ҵ��������˵���ˡ��ּ������й����Ļ��������ۻ�����Ӧ������һ��ҵ�������漰�����˺ͷּ�������ǰ��������ҵ������Ŷ�“�˹��ɱ�����”����ս���������������˹�����������ҵ��Ϊ���ء����ͬʱ��һЩΣ���Եģ��������Ĺ���Ҳ��Ҫ���˵IJ��룬������μ���������Ͷ�룬���ͷ�Ʒ�ʣ�ѹ�������ɱ���������������Σ�����صȶ���Ϊ���ʱ������Ҫ“����”��
�������Ӿ�ϵͳ����������ϵIJ�Ʒ��������Ʒ�Ƿ��������Ҫ�����ݽ����������Ӧ���ź�������λ������һϵͳȡ���˿������˹��ļ�⣬�Ƚ�Լ�ɱ��������˼��Ŀɿ��ԣ���ʵ�ԣ�����Ƚ����˵��Ͷ�ǿ�ȣ����ڸ��ֻ�е�ӹ����Ͻ���Ӧ�ã������˸�Ч�ʡ����ܺĵ�����Ҫ��
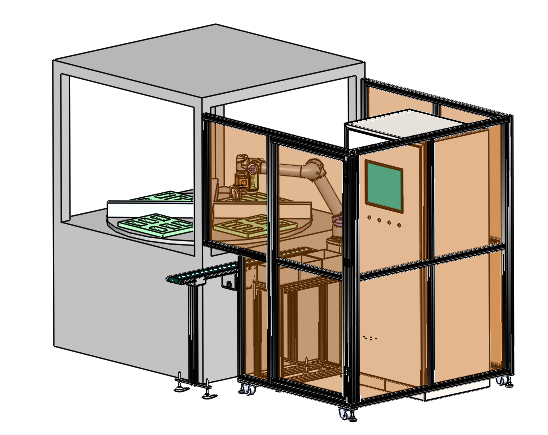
����д�Ļ��ڻ����˵��Ӿ��ּ�ϵͳ�����ƣ����ڼ������ɲ��Ƭ�ϵ��ɵ��������Ͻ��еġ�����������ǰ�������ڣ�������ҵ�ķ�չ�������Ÿ��ߵ��Զ�������չ�������Ҳ�ѡ������ƪ���ġ�
��ƪ���ķ�Ϊ�������ⲿ��:һ�ǻ����ˣ������ֱۣ��������Ӿ���ⲿ�֡���������ϵ��һ�����ͨ�������ӵ�S7-1500PLC�����������ڻ����˲��ֲ��õ����Ű��������ֱۣ��Ӿ���ⲿ���ǿ����ӵ�����ͼ������������������ɲ��Ƭ�ϵĵ�����Ȼ��ͨ��������ʶ��ģ���ô�ض�����Ϊ��Ϊ��ƣ�͵�ԭ����ɼ��������������ʧ�����ǣ�ͨ������Ƶķ�����������ļ����Ͷ����ͳɱ����Ӷ���������˹���Ч�ʣ�����Ϊ�㡣
�������������������о�����Ҫ�о������ݣ�Ҫ��������⣬Ԥ��Ŀ�꣬�о����衢��������ʩ�ȣ�
��һ����Ҫ����:
�ÿ�����Ҫ���о��������Ӿ��ּ�ϵͳ����ϵͳ��Ϊ�˺ܴ�̶ȵļ���������Ͷ�ʣ������˹��ɱ����û����˴����˹����Ӹ���IJ�������Ҳ�����˹���һЩΣ���ԵIJ�����������Ա�����������Ե����˹������Ѿ����㲻���������������Ҫ���Ӿ��������Ļ����������˹���
��������������Ҫ����:
1.�����˺��Ӿ���������ṹ��ƣ�
2.�����Ӳ�������밲װ��
3.������ϵͳ��������ƣ�
4.ͼֽ���ƣ�
5.�����˺�������������С�
������Ԥ��Ŀ��:
������Ŀ��������Ӿ��Զ���⣬�������Զ��ּ𣬽��õĺͲ��õ����ַ��á���֤������ˮ���˳�����У���֤����ȷ�ʵȡ�
���ģ��о�����
������Ĺ��������Ϊ�ĸ��Σ�
��һ�Σ��������ף��г����С��ռ����ϡ�ȷ�����ⷽ������ɿ��ⱨ�棻
�ڶ��Σ�����ϵͳʵ�ʿ���Ҫ��ȷ����ƻ���������
�����Σ����Ƶ���ԭ��ͼ��PLC����ͼ��
���ĽΣ������������ϣ���ɱ�ҵ������ļ���硣
���壩������������ʩ��
1���ο���������ֲ
2��ͨ�����磬���ĸ���������ϣ�
3������ƹ���������������ָ����ʦ��̣�ֱ��������⡣
Ŀ¼
��һ�� ���� 2
1.1 �����˵ļ��2
1.2�����˵ķ�չ��ʷ3
1.3�Ӿ�ϵͳ�ļ��ͷ�չ4
1.4�����о���������弰�����Ҫ4
�ڶ��»�е���ԭ������6
2.1�豸�������ά����ͼ6
2.1.1�豸����˵��6
2.2��е���ʾ��ͼ7
2.2.1�Ӿ����װ��7
2.2.2���ϻ����˼�����װ��8
2.2.3��������צ�̶�װ��9
�������Ӿ����ϵͳ��ȷ����������˵��10
3.1��ĿҪ��10
3.2���ϵͳ��Ӳ������10
3.2.1�Ӿ�Ӳ������10
3.2.2�Ӿ�Ӱ��10
3.3��������Ľ��ܺ��ͺŵ�ȷ��11
3.4���ڹ�Դ�ļ�������ȷ��15
3.5�������ͺŵ�ȷ����˵��18
3.5.1�������ֱ����18
3.5.2�Ű������˵Ŀ�����ʹ�����19
3.5.3�Ű������˲���21
�����µ���������ѡ�ͷ���23
4.1�������Ʋ���23
4.1.1������������23
4.1.2ϵͳ��������ͼ24
4.2 PLC����25
4.2.1 ���������I/O������� 25
4.2.2 ȷ��PLC��ѡ��25
4.3����ԭ��ͼ���� 28
4.3.1��������ͼ28
4.3.2����·ͼ29
4.3.3��Դģ��30
4.3.4 PLC����ģ��31
4.3.5 PLC���ģ��32
4.4PLC����˵��33
������ �ܽ����л40
����� 49
��¼ 50
�����
1.�����˸��ۣ����ƽ�����-��������е��ҵ�����磬2016
2. SIMATIC S7-1500�ɱ���������˵���飬 2016
3. PLCӦ�ü�����ʵ��������������-���������ӹ�ҵ�����磬2014,12
4. ���ڻ����Ӿ����ַ�ʶ�����о���ʯ����Ϸʹ�ҵ��ѧ˶ʿ���ġ�- 2006-05-01