
苏ICP备112451047180号-6
小球滚动控制系统设计
摘 要
研究小球滚动控制系统对于工业控制中的平衡控制以及工业控制的精度控制有着一定影响,平衡控制主要在于根据被控对象的转动角度和我们设定目标角度之间的差值;由比较器比较出大小,算出差值,平衡控制进而引出电机测控系统中的电机控制,采用一定的PID算法,通过PID控制器对于差值的比例、积分、微分运算,对电机的转速和电机的转动方向进行控制,本论文主要研究了对于小球滚动控制系统所需要的模块,元器件和类型,控制原理等。
在介绍了悬浮球控制系统的组成和工作原理的基础上,通过理论和实验的方法建立了磁悬浮系统的模型,并通过在平衡点附近线性化建立了对应的磁悬浮线性系统模型,得到了系统的传递函数。在此基础上,分析了系统的稳定性,设计了系统的PID控制器并采用MATLAB软件进行了仿真。在获得PID参数后用c语言对单片机编程,程序分为DAVE辅助编程软件生成的程序和手动编写的程序,主要包括IO初始化模块,AD模块,PID算法模块,CCU6调制波输出模块以及一个死循环的主程序,以实现对磁悬浮球的实时控制。在最后系统的调试中,PID参数需要进一步修改已达到控制效果最佳。
关键词:XC164CM;IR2110; PID控制;
ABSTRACT
Magnetic suspension technology make a set of electromagnetics, electronic technology, control engineering, signal processing, mechanics, dynamics as one ,which is a typical electromechanical integration technology, it has very important theoretical and practical significance. The corresponding maglev system is a kind of unstable and nonlinear system, in which the controller design is very important, the design of controller based on XC164CM single chip. In the hardware design of the system is introduced the composition, structure, circuit design. Success in building the single-chip microprocessor control circuit of silicon photovoltaic cells, the linearity of the measurement, and then use ICL7650design choice amplifying circuit, chip built in IR2110driving circuit.
After the introduction of the floating ball control system composition and working principle of the basis, through the theoretical and experimental methods to establish a magnetic suspension system model, and through the near the equilibrium point linearization establishes corresponding maglev linear system model, get the system transfer function. On the basis of this, analyze the stability of the system, design of the system with PID controller and using MATLAB software simulation. In the PID parameters by using C language programming, the program is divided into DAVE auxiliary programming software for generating program and manual prepared by the procedures, including IO initialization module, AD module, PID algorithm module, CCU6 modulated wave output module and a closed loop of the main program,
Key words: Magnetic levitation; XC164CM; IR2110; PID control;
摘 要
研究小球滚动控制系统对于工业控制中的平衡控制以及工业控制的精度控制有着一定影响,平衡控制主要在于根据被控对象的转动角度和我们设定目标角度之间的差值;由比较器比较出大小,算出差值,平衡控制进而引出电机测控系统中的电机控制,采用一定的PID算法,通过PID控制器对于差值的比例、积分、微分运算,对电机的转速和电机的转动方向进行控制,本论文主要研究了对于小球滚动控制系统所需要的模块,元器件和类型,控制原理等。
在介绍了悬浮球控制系统的组成和工作原理的基础上,通过理论和实验的方法建立了磁悬浮系统的模型,并通过在平衡点附近线性化建立了对应的磁悬浮线性系统模型,得到了系统的传递函数。在此基础上,分析了系统的稳定性,设计了系统的PID控制器并采用MATLAB软件进行了仿真。在获得PID参数后用c语言对单片机编程,程序分为DAVE辅助编程软件生成的程序和手动编写的程序,主要包括IO初始化模块,AD模块,PID算法模块,CCU6调制波输出模块以及一个死循环的主程序,以实现对磁悬浮球的实时控制。在最后系统的调试中,PID参数需要进一步修改已达到控制效果最佳。
关键词:XC164CM;IR2110; PID控制;
ABSTRACT
Magnetic suspension technology make a set of electromagnetics, electronic technology, control engineering, signal processing, mechanics, dynamics as one ,which is a typical electromechanical integration technology, it has very important theoretical and practical significance. The corresponding maglev system is a kind of unstable and nonlinear system, in which the controller design is very important, the design of controller based on XC164CM single chip. In the hardware design of the system is introduced the composition, structure, circuit design. Success in building the single-chip microprocessor control circuit of silicon photovoltaic cells, the linearity of the measurement, and then use ICL7650design choice amplifying circuit, chip built in IR2110driving circuit.
After the introduction of the floating ball control system composition and working principle of the basis, through the theoretical and experimental methods to establish a magnetic suspension system model, and through the near the equilibrium point linearization establishes corresponding maglev linear system model, get the system transfer function. On the basis of this, analyze the stability of the system, design of the system with PID controller and using MATLAB software simulation. In the PID parameters by using C language programming, the program is divided into DAVE auxiliary programming software for generating program and manual prepared by the procedures, including IO initialization module, AD module, PID algorithm module, CCU6 modulated wave output module and a closed loop of the main program,
Key words: Magnetic levitation; XC164CM; IR2110; PID control;
目 录
目 录 1
第1章 绪论 1
1.1 论文的研究背景目的及意义 1
1.2 国内外发展状况 2
1.3 研究方法与实验设计 4
1.4 论文研究的主要内容 6
第2章 系统的总体设计方案 7
2.1 系统结构及控制原理 7
2.2 系统硬件设计 9
2.3 系统软件实现 10
2.4本章小结 14
第3章 硬件系统的设计与实现 15
3.1 测量元件 15
3.1.1 硅光电池的工作原理及其特性 15
3.1.2 利用ICL7560设计放大电路 19
3.1.3 传感器标定试验 22
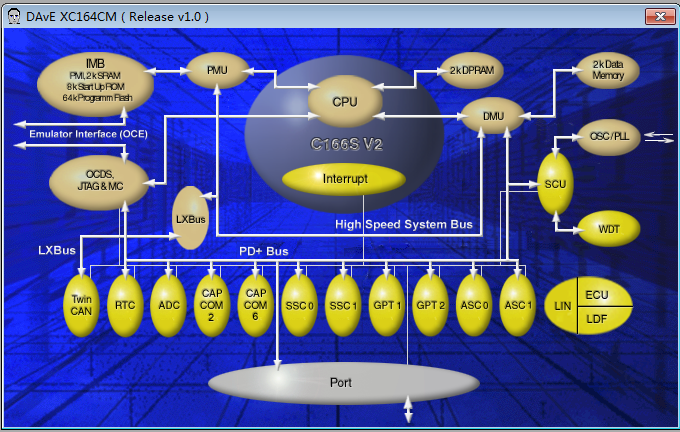
3.2 XC164CM控制电路片上资源 24
3.2.1 片上系统资源总括 25
3.2.2 片上外设资源 26
3.2.3 时钟信号的产生 26
3.3 硬件电路系统的实现 28
3.3.1 A/D转换器 28
3.3.2 PWM产生原理 29
3.3.3 桥式电路的设计 31
3.3.4 功率驱动电路 32
3.3.5 XC164CM单片机电路 34
3.4 本章小结 37
第4章 系统数学模型的建立 38
4.1 微分方程的推导 38
4.1.1.1 控制对象的动力学方程 38
4.1.1.2 系统的电磁力模型 39
4.1.1.3 电磁铁中控制电压与和电流的模型 41
4.1.1.4 功率放大器模型 43
4.1.1.5 系统平衡的边界条件 43
4.1.1.6 系统方程的描述 43
4.2 系统模型线性化处理 44
4.2.1 线性化理论基础 44
4.2.2 系统模型线性化处理 46
4.3 系统控制模型的建立 47
4.4 系统实际模型 49
4.4.1 系统物理参数 49
4.4.2 实际模型的建立 49
4.5 PID参数的确定PID 50
4.6 本章小结 54
第5章 软件设计 55
5.1 Dave的使用 55
5.2 软件系统简介 56
5.2 核心程序介绍 58
5.2.1 主程序 58
5.2.2 AD采样 59
5.2.3 PID算法的实现 61
5.2.4 CCU6输出 63
5.3 本章小结 64
结论 65
参考文献 67
致谢 69
附录 70
研究方法与实验设计
本设计在单片机的基础上采用PID算法,在过去的几十年里,PID控制器在工业控制中得到了广泛的应用.在控制理论和技术飞速发展的今天,工业过程控制中,95%以上的控制回路都具有PID结构,并且许多高级控制也都是以PID控制为基础的.
从频域角度上分析,PID控制是通过积分作用于系统的低频段,以提供系统的稳态性能;而微分作用于系统的中频段,以改善系统的动态性能。因此,PID控制器的参数整定是控制系统设计的核心内容,它应该根据被控对象的特性,来确定PID控制器的比例系数、积分时间常数和微分时间常数。
PID控制器参数整定的方法有很多,概括起来有两大类:
1、理论计算整定法,主要依据系统的数学模型,经过理论计算或计算机仿真来确定控制器的参数。这种方法所得到的计算数据未必可以直接使用,还必须通过工程实际进行调整和修改,但它可以作为参数整定的参考依据。
2、工程整定方法,主要有Ziegler--Nichols整定法、临界比例度法、衰减曲线法。这三种方法各有特点,其共同点都是通过试验然后按照工程经验公式对控制器参数进行整定。但无论采用哪一种方法所得到的控制器参数,都需要在实际运行中进行最后的调整与完善。工程整定法的基本特点是:不需要事先知道被控对象的数学模型,而直接在控制系统中进行现场整定,方法简单,计算方便,容易掌握。
PID控制器具有以下优点:
(1)原理简单,使用方便,PID参数可以根据过程动态特性及时调整。如果过程的动态特性发生变化,如对负载变化引起的系统动态特性变化,PID参数就可以重新进行调整与设定。
(2)适应性强,应用范围广。虽然很多工业工程是非线性或时变的,但通
过适当简化,可以将其变成基本线性和动态特性不随时间变化的系统,这样就可以通过PID控制了。
(3)鲁棒性强,即其控制品质对被控对象特性的变化不太敏感。
当然,PID控制器也有其固有的缺点。它在控制非线性、时变、耦合及参数和结构不确定的复杂过程时,效果不是太好。虽然有这些缺点,但PID控制器仍因其自身的优点而得到了最广泛的应用[7]。
由于PID控制器的用途广泛,使用灵活,已有系列化产品,在使用中只需设定三个参数即可。而且在很多情况下,并不一定都需要三个单元,可以只取其中的一个或者两个单元,不过比例控制单元是必不可少的,因为它是PID控制器的主体部分,起着主要的控制作用。
论文研究的主要内容
本设计采用XC164CM单片机作为控制器,运用经典的PID对磁悬浮球进行控制。
(1)介绍论文的研究背景和选题的目的和意义。综述了国内外的研究现状,概括地介绍论文的设计内容。
(2)的硬件电路的设计,介绍系统主要硬件电路的设计,主要包括三部分电路的设计,利用IR2110以及IRF540设计电磁铁驱动电路,利用XC164CM设计控制电路,还需搭建一个ICL7650的放大电路。
(3) 程序辅助软件Dave的应用说明,对PID算法进行说明,并对程序进行分块编程。
(4) 说明系统调试过程和在整个硬件制作软件调试过程中出现的问题以及解决的方法。
参考文献
[1] 戴政. 磁悬浮技术综述. 中小型电机[J]. 2000,27(2):1~2
[l]张士勇.磁悬浮技术的应用现状与展望[J].工业仪表与自动化装置,2003(3):2~3
[3] 刘少克, 常文森,尹力明. 日本磁悬浮列车 HSST-100 运行试验综述. 机车电传动,1997,6:4~5
[4] 王希平. 磁悬浮在工程中的应用和发展. 机电工程,1993,3:4~5
[5] 程剑锋,苏晓峰. 磁悬浮列车的发展及应用. 铁道车辆,2003,11:8~9
[6] 王天录. 我国磁悬浮铁路的发展概况. 电气化铁道,2002,2:8~9
[7] 陆新江,段吉安,李群明. 自调整 PID 控制算法及其在磁悬浮平台中的应用.工业仪表与自动化装置,2005(3):6~7
[8] 宋文荣,于国飞,王延风,何惠阳,田兴志. 六维磁悬浮纳米级精密工件台的研究. 微细加工技术,2003,3:13~16
[9] 何勇,王生泽.光电传感器及其应用[M].化学工业出版社,2004.17~19
[10] 陈杰,黄鸿.传感器与检测技术[M].高等教育出版社,2002.22~23
[11] 赖传成,尹力明.基于DSP磁悬浮球数字数字控制的设计川.长沙大学学报,2003,17(4):25~27
[12] 刘洋,范瑜.一种基于DSP的磁悬浮模糊控制系统的研究明.仪器仪表标准化与计量,2003:29~31
[13] William G Hurley and Werner H W61fle.ElectromagneticDesignof aMagnetic SuspensionSystem[J].IEEE Traus.Educ.,v01.40,NO.2,MAY1997.33~35
[14] William Gerard Hurley,Martin Hynes,Wemer HugoW61fle.PWM Control of aMagneticSuspension System.[J].IEEE Trans.Educ.voL,47,NO.2,MAY 2004.35~37
[15] 刘豹,唐万生.现代控制理论.机械工业出版社,2006.37~40
[16] 罗抟翼,程桂芬等.控制工程与信号处理[M].化学工业出版社,2004.38~44
[17] 钟庆昌,谢剑英,李辉. 变参数 PID 控制器的设计. 信息与控制,1999,28(4):44~46
[18] 朱建公,张俊俊. 变参数 PID 控制器设计. 西北大学学报,2003,33(4):50~52
[19] 曹路,李海峰,戴先中等. 用于 TCSC 阻抗控制的变参数 PID 方法. 电力系统自动化,1999,23(24):51~53
[20] 王正林,王胜开等.MATLAB/Simulink与控制系统仿真口阅.电子工业出版社,2005.50~54

研究方法与实验设计
本设计在单片机的基础上采用PID算法,在过去的几十年里,PID控制器在工业控制中得到了广泛的应用.在控制理论和技术飞速发展的今天,工业过程控制中,95%以上的控制回路都具有PID结构,并且许多高级控制也都是以PID控制为基础的.
从频域角度上分析,PID控制是通过积分作用于系统的低频段,以提供系统的稳态性能;而微分作用于系统的中频段,以改善系统的动态性能。因此,PID控制器的参数整定是控制系统设计的核心内容,它应该根据被控对象的特性,来确定PID控制器的比例系数、积分时间常数和微分时间常数。
PID控制器参数整定的方法有很多,概括起来有两大类:
1、理论计算整定法,主要依据系统的数学模型,经过理论计算或计算机仿真来确定控制器的参数。这种方法所得到的计算数据未必可以直接使用,还必须通过工程实际进行调整和修改,但它可以作为参数整定的参考依据。
2、工程整定方法,主要有Ziegler--Nichols整定法、临界比例度法、衰减曲线法。这三种方法各有特点,其共同点都是通过试验然后按照工程经验公式对控制器参数进行整定。但无论采用哪一种方法所得到的控制器参数,都需要在实际运行中进行最后的调整与完善。工程整定法的基本特点是:不需要事先知道被控对象的数学模型,而直接在控制系统中进行现场整定,方法简单,计算方便,容易掌握。
PID控制器具有以下优点:
(1)原理简单,使用方便,PID参数可以根据过程动态特性及时调整。如果过程的动态特性发生变化,如对负载变化引起的系统动态特性变化,PID参数就可以重新进行调整与设定。
(2)适应性强,应用范围广。虽然很多工业工程是非线性或时变的,但通
过适当简化,可以将其变成基本线性和动态特性不随时间变化的系统,这样就可以通过PID控制了。
(3)鲁棒性强,即其控制品质对被控对象特性的变化不太敏感。
当然,PID控制器也有其固有的缺点。它在控制非线性、时变、耦合及参数和结构不确定的复杂过程时,效果不是太好。虽然有这些缺点,但PID控制器仍因其自身的优点而得到了最广泛的应用[7]。
由于PID控制器的用途广泛,使用灵活,已有系列化产品,在使用中只需设定三个参数即可。而且在很多情况下,并不一定都需要三个单元,可以只取其中的一个或者两个单元,不过比例控制单元是必不可少的,因为它是PID控制器的主体部分,起着主要的控制作用。
论文研究的主要内容
本设计采用XC164CM单片机作为控制器,运用经典的PID对磁悬浮球进行控制。
(1)介绍论文的研究背景和选题的目的和意义。综述了国内外的研究现状,概括地介绍论文的设计内容。
(2)的硬件电路的设计,介绍系统主要硬件电路的设计,主要包括三部分电路的设计,利用IR2110以及IRF540设计电磁铁驱动电路,利用XC164CM设计控制电路,还需搭建一个ICL7650的放大电路。
(3) 程序辅助软件Dave的应用说明,对PID算法进行说明,并对程序进行分块编程。
(4) 说明系统调试过程和在整个硬件制作软件调试过程中出现的问题以及解决的方法。
参考文献
[1] 戴政. 磁悬浮技术综述. 中小型电机[J]. 2000,27(2):1~2
[l]张士勇.磁悬浮技术的应用现状与展望[J].工业仪表与自动化装置,2003(3):2~3
[3] 刘少克, 常文森,尹力明. 日本磁悬浮列车 HSST-100 运行试验综述. 机车电传动,1997,6:4~5
[4] 王希平. 磁悬浮在工程中的应用和发展. 机电工程,1993,3:4~5
[5] 程剑锋,苏晓峰. 磁悬浮列车的发展及应用. 铁道车辆,2003,11:8~9
[6] 王天录. 我国磁悬浮铁路的发展概况. 电气化铁道,2002,2:8~9
[7] 陆新江,段吉安,李群明. 自调整 PID 控制算法及其在磁悬浮平台中的应用.工业仪表与自动化装置,2005(3):6~7
[8] 宋文荣,于国飞,王延风,何惠阳,田兴志. 六维磁悬浮纳米级精密工件台的研究. 微细加工技术,2003,3:13~16
[9] 何勇,王生泽.光电传感器及其应用[M].化学工业出版社,2004.17~19
[10] 陈杰,黄鸿.传感器与检测技术[M].高等教育出版社,2002.22~23
[11] 赖传成,尹力明.基于DSP磁悬浮球数字数字控制的设计川.长沙大学学报,2003,17(4):25~27
[12] 刘洋,范瑜.一种基于DSP的磁悬浮模糊控制系统的研究明.仪器仪表标准化与计量,2003:29~31
[13] William G Hurley and Werner H W61fle.ElectromagneticDesignof aMagnetic SuspensionSystem[J].IEEE Traus.Educ.,v01.40,NO.2,MAY1997.33~35
[14] William Gerard Hurley,Martin Hynes,Wemer HugoW61fle.PWM Control of aMagneticSuspension System.[J].IEEE Trans.Educ.voL,47,NO.2,MAY 2004.35~37
[15] 刘豹,唐万生.现代控制理论.机械工业出版社,2006.37~40
[16] 罗抟翼,程桂芬等.控制工程与信号处理[M].化学工业出版社,2004.38~44
[17] 钟庆昌,谢剑英,李辉. 变参数 PID 控制器的设计. 信息与控制,1999,28(4):44~46
[18] 朱建公,张俊俊. 变参数 PID 控制器设计. 西北大学学报,2003,33(4):50~52
[19] 曹路,李海峰,戴先中等. 用于 TCSC 阻抗控制的变参数 PID 方法. 电力系统自动化,1999,23(24):51~53
[20] 王正林,王胜开等.MATLAB/Simulink与控制系统仿真口阅.电子工业出版社,2005.50~54