

苏ICP备112451047180号-6
工业机械手控制系统设计及制作
摘要:近年来,随着工业自动化的普及,控制需求的逐年增加,应用识别,分类和双机械手码垛机械手也逐渐流行,主要以机械加工,汽车,医药,食品,电子产品和货物运输或生产线等领域,可以更好地节约能源和产品的效率或改善运输设备,减少处理的缺陷和局限性,适应现代经济发展的需要。
At present, the industrial robot technology has been quite mature, many developed and developing countries in the world have been widely applied this technology in China, because of the young labor force, low labor costs, this technology is not widely used. However, as the labor costs increase, most enterprises lack of work in the situation and problems have become increasingly prominent and difficult to hire. I believe that in the near future, there are more robots will be assigned to factory enterprises, as a new generation of labor. Along with the science and technology and industrial automation steps, Mitsubishi integrated systems are constantly upgrading, this design is a IQ-platform platform using FA Mitsubishi product structures, system has 4 CPU, two RV-2SQ, Ethernet, industrial robot vision sensor, the frequency and GOT integrated FA will complete and integrate the concept of concentration show, to adapt to a variety of tasks, fully embodies the advanced concept of flexible automation.
目前,工业机器人技术已相当成熟,许多发达国家和发展中国家在世界已在中国广泛应用这项技术,因为年轻劳动力,劳动力成本低,这项技术并没有得到广泛的应用。然而,随着劳动力成本的增加,大部分企业缺乏工作的现状和存在的问题日益突出,招工难。我相信在不久的将来,有更多的机器人将被分配到工厂企业,作为新一代的劳动。随着科学技术和工业自动化的步骤,三菱综合系统的不断升级,这种设计是一个使用FA三菱产品结构智力平台,系统有4个CPU,两rv-2sq,以太网,工业机器人的视觉传感器,频率和整体足总将完成和整合集中展示概念,适应各种任务,充分体现了柔性自动化的先进理念。
Keywords: Q series PLC, RV-2SQ, A700 inverter, industrial robot vision, IQ-platform platform, GOT1000.
关键词:Q系列PLC,rv-2sq,A700变频器,工业机器人视觉平台,智商,GOT1000。
Outline: In recent years, with the rapid development and popularization of industrial automation, control demand increased year by year, application identification, sorting and stacking manipulator with dual manipulator is also gradually popular, mainly in the processing machinery, automotive, pharmaceutical, food, electronics and other fields of the cargo transport or production lines, can be better to save energy efficiency or improve the products and transportation equipment, in order to reduce the other mode of transport to the deficiencies and limitations, to meet the needs of modern economic development.
目前,工业机器人技术已经相当成熟,世界范围内的很多发达以及发展中国家已经广泛应用此项技术,我国因青壮劳力多,劳动力成本较低,此项应用技术并不广泛。但是,随着人工成本的大幅增加,大多企业的缺工情况和招工成了难问题并日益突出。相信不久的将来,有更多的机器人将入驻工场企业,成为新一代的劳动力。伴随着科学技术以及工业化自动化的脚步,三菱集成系统也在不断升级之中,本设计是采用三菱FA产品搭建的一个IQ-platform平台,系统有4个CPU、两个RV-2SQ工业机器人、以太网、视觉传感器、变频和GOT集成于一体将FA整合概念完整的浓缩并展现了出来,适应多种任务,充分体现了柔性自动化这一先进理念。
At present, the industrial robot technology is already quite mature, many developed and developing countries in the world has been widely application of this technology in our country, because of the young labor force, labor cost is low, the application is not widespread. However, with the development of artificial cost increase, most enterprises lack of work and job into a difficult problem and increasingly prominent. I believe that in the near future, the robot will have more enterprises settled in the factory, as a new generation of labor. Along with the science and technology and industrial automation pace, Mitsubishi integrated systems are constantly upgrading, this design is a IQ-platform platform using FA to build the system Mitsubishi products, there are 4 CPU, two RV-2SQ, Ethernet, industrial robot vision sensor, frequency conversion and GOT integrated the concentrated FA complete and integrated concept show, to adapt to a variety of tasks, fully embodies the advanced concept of flexible automation.
关键词:Q系列PLC、RV-2SQ工业机器人、A700变频器、视觉、GOT1000、IQ-platform平台。
Keywords: Q series PLC, RV-2SQ, A700, industrial robot vision, GOT1000,IQ-platform platform.
第一章 引言
因为大多数的企业和工厂运作的权力,劳动都是一种最重要的生产要素,自古以来就有着不可或缺的地位。
However, in recent years, with the sharp rise in labor costs, enterprises lack of work and recruitment difficult problems have become increasingly prominent, especially in recent years, with the economic growth rate of decline increased the employment pressure, corporate survival is a great challenge. It faces two major difficulties: one is the enterprise labor costs continue to rise, including technical workers and ordinary workers wages are presented by quarter rise; two is the enterprise recruitment difficult problem is particularly prominent, and the structural characteristics and seasonal outburst, the main reason is that the new generation of migrant workers to improve the employment expectation. At the same time, along with the development of modern industry and constantly improve the level, demand for the product quality and production efficiency has been improved.
然而,近年来,随着劳动力成本的急剧上升,企业缺乏工作和招工难的问题日益突出,特别是近年来,随着经济增速的下降增加了就业的压力,企业的生存是一个巨大的挑战。其面临的两大困难:一是企业劳动力成本不断上升,包括技术工人和普通工人的工资是按季度上升了;二是企业招工难的问题尤为突出,其结构特征及季节性突出,主要的原因是,提高农民工的就业期望新一代。同时,随着现代工业的发展水平不断提高的需求,对产品的质量和生产效率的不断提高。
With the continuous progress of the world industry and the development of science and technology, the development speed of the industrial robot is accelerating, has become one of the three pillars of modern industry. In modern production, the manipulator is widely used in automatic production. It replaces manual labor in the simple sense, but a comprehensive electronic mechanical device of personification people's strengths and machine expertise, as a man of the state of the environment of rapid reaction and judging ability, and the machine can continue working, high precision, anti adverse circumstance ability long time. Production of mechanical hand can improve the automation level of production and labor productivity: can reduce labor intensity, to ensure the quality of products, to achieve safe production; especially in high temperature and high pressure, low temperature, low pressure, dust, explosive, toxic gases, radioactive and other harsh environments. The structure of the manipulator is relatively simple, specific and strong, to repeat work and labor, not tired, not afraid of danger, snatch heavy power than a human hand.
随着世界工业的不断进步和科学技术的发展,工业机器人的发展速度不断加快,已经成为现代工业的三大支柱。在现代化生产中,机械手被广泛应用于自动化生产。它取代了手工劳动的简单意义,而是一个综合的电子机械装置拟人的人的优势和机的专业知识,作为一个男人的快速反应和分析判断能力的环境的状态,和机器可以继续工作,精度高,抗恶劣环境的能力长时间。生产中应用机械手可以提高生产的自动化水平和劳动生产率:可以减轻劳动强度,保证产品质量,实现安全生产;尤其在高温、高压,低温,低压,粉尘,易爆,有毒气体,放射性等恶劣环境中。机械手的结构相对简单,特异性强,重复工作和劳动,不累,不怕危险,抢夺大功率比人的手。
第二章 设计的特点及意义
2.1机械手控制系统的特点
机器能够独立设计的程序,重复同样的程序完成操作,可以改变任务的不同类型的生产,具有较强的机械手的动作;控制精度高,操作灵活的高速传输传统的机械手,大约是三倍系统工作效率,柔性机械手,可以不需要适应不同环境,不同需求设计不同的控制结构,降低生产成本和设计周期和设备制造;PLC三菱Q系列高精度智能控制;使用传统的视觉检测的一代可以大大提高检测精度与检测更强大,能够承载更多的智能控制器的任务要求。机器人控制器的以太网LAN路由器,一个视觉的相互数据传输,更快和更liscio.fr-a700系列高性能矢量转换,具有高驱动性能,具有独特的无传感器矢量控制方式,无需采用编码器可在各种情况下机械设备运行在超低速高精度控制的区域差异,精度高,误差小;采用触摸屏为控制处理设备一套,使绘画操作更简单和更直观的控制。
2.2机械手控制系统设计的意义
High efficiency, flexible production design, fast and smooth data transmission, high precision control, intuitive control and simple operation, can adapt to the processing of high precision high production efficiency of the production requirements of enterprises, and enterprises to solve the employment difficult situation.
高效,灵活的产品设计,快速流畅的数据传输,控制精度高,直观的控制,操作简单,能适应高精度、高生产效率的企业生产要求的处理,和企业来解决就业难的现状。
摘要:近年来,随着工业自动化的普及,控制需求的逐年增加,应用识别,分类和双机械手码垛机械手也逐渐流行,主要以机械加工,汽车,医药,食品,电子产品和货物运输或生产线等领域,可以更好地节约能源和产品的效率或改善运输设备,减少处理的缺陷和局限性,适应现代经济发展的需要。
At present, the industrial robot technology has been quite mature, many developed and developing countries in the world have been widely applied this technology in China, because of the young labor force, low labor costs, this technology is not widely used. However, as the labor costs increase, most enterprises lack of work in the situation and problems have become increasingly prominent and difficult to hire. I believe that in the near future, there are more robots will be assigned to factory enterprises, as a new generation of labor. Along with the science and technology and industrial automation steps, Mitsubishi integrated systems are constantly upgrading, this design is a IQ-platform platform using FA Mitsubishi product structures, system has 4 CPU, two RV-2SQ, Ethernet, industrial robot vision sensor, the frequency and GOT integrated FA will complete and integrate the concept of concentration show, to adapt to a variety of tasks, fully embodies the advanced concept of flexible automation.
目前,工业机器人技术已相当成熟,许多发达国家和发展中国家在世界已在中国广泛应用这项技术,因为年轻劳动力,劳动力成本低,这项技术并没有得到广泛的应用。然而,随着劳动力成本的增加,大部分企业缺乏工作的现状和存在的问题日益突出,招工难。我相信在不久的将来,有更多的机器人将被分配到工厂企业,作为新一代的劳动。随着科学技术和工业自动化的步骤,三菱综合系统的不断升级,这种设计是一个使用FA三菱产品结构智力平台,系统有4个CPU,两rv-2sq,以太网,工业机器人的视觉传感器,频率和整体足总将完成和整合集中展示概念,适应各种任务,充分体现了柔性自动化的先进理念。
Keywords: Q series PLC, RV-2SQ, A700 inverter, industrial robot vision, IQ-platform platform, GOT1000.
关键词:Q系列PLC,rv-2sq,A700变频器,工业机器人视觉平台,智商,GOT1000。
Outline: In recent years, with the rapid development and popularization of industrial automation, control demand increased year by year, application identification, sorting and stacking manipulator with dual manipulator is also gradually popular, mainly in the processing machinery, automotive, pharmaceutical, food, electronics and other fields of the cargo transport or production lines, can be better to save energy efficiency or improve the products and transportation equipment, in order to reduce the other mode of transport to the deficiencies and limitations, to meet the needs of modern economic development.
目前,工业机器人技术已经相当成熟,世界范围内的很多发达以及发展中国家已经广泛应用此项技术,我国因青壮劳力多,劳动力成本较低,此项应用技术并不广泛。但是,随着人工成本的大幅增加,大多企业的缺工情况和招工成了难问题并日益突出。相信不久的将来,有更多的机器人将入驻工场企业,成为新一代的劳动力。伴随着科学技术以及工业化自动化的脚步,三菱集成系统也在不断升级之中,本设计是采用三菱FA产品搭建的一个IQ-platform平台,系统有4个CPU、两个RV-2SQ工业机器人、以太网、视觉传感器、变频和GOT集成于一体将FA整合概念完整的浓缩并展现了出来,适应多种任务,充分体现了柔性自动化这一先进理念。
At present, the industrial robot technology is already quite mature, many developed and developing countries in the world has been widely application of this technology in our country, because of the young labor force, labor cost is low, the application is not widespread. However, with the development of artificial cost increase, most enterprises lack of work and job into a difficult problem and increasingly prominent. I believe that in the near future, the robot will have more enterprises settled in the factory, as a new generation of labor. Along with the science and technology and industrial automation pace, Mitsubishi integrated systems are constantly upgrading, this design is a IQ-platform platform using FA to build the system Mitsubishi products, there are 4 CPU, two RV-2SQ, Ethernet, industrial robot vision sensor, frequency conversion and GOT integrated the concentrated FA complete and integrated concept show, to adapt to a variety of tasks, fully embodies the advanced concept of flexible automation.
关键词:Q系列PLC、RV-2SQ工业机器人、A700变频器、视觉、GOT1000、IQ-platform平台。
Keywords: Q series PLC, RV-2SQ, A700, industrial robot vision, GOT1000,IQ-platform platform.
目 录
摘要 6
第一章 引言 9
第二章 设计的特点及意义 10
2.1 机械手控制系统的特点 10
2.2 机械手控制系统设计的意义 10
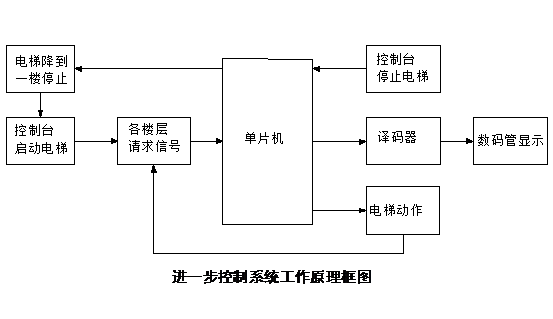
第三章 设计系统的原理框图和工作原理 11
3.1 工作系统的原理框图 11
3.2 各工作系统的工作原理 11
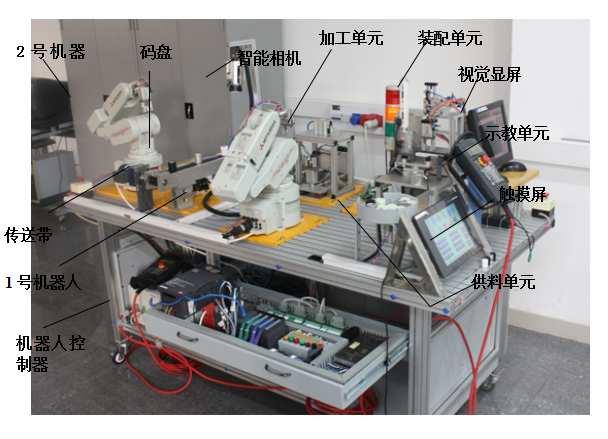
第四章 各系统单元介绍 20
4.1 工件供料单元 20
4.2 装配单元 20
4.3 加工单元 21
4.4 输送单元 21
第五章 硬件设计 23
5.1 配电箱电路设计 23
5.2 机械手的工作流程图 23
5.3 I/O信号端子设计 24
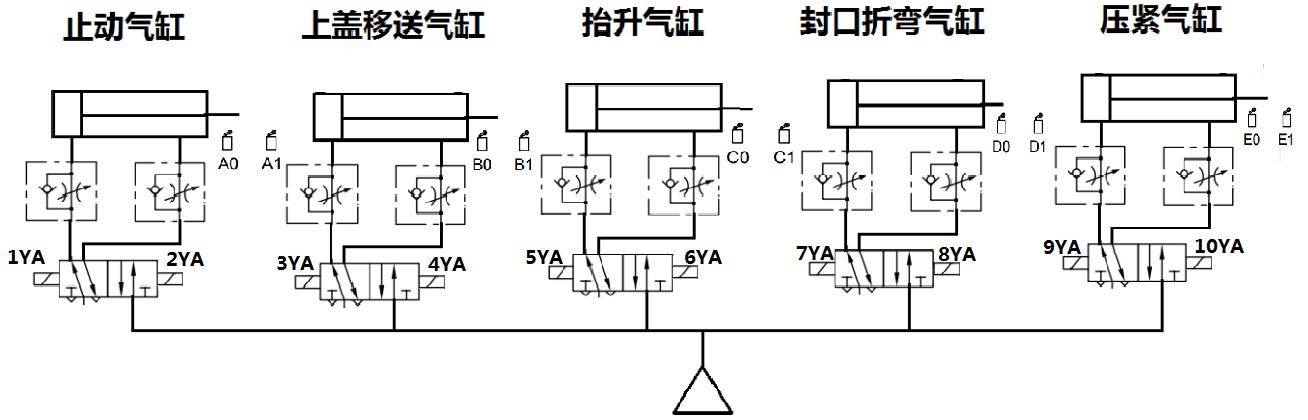
5.4 装配单元气动控制回路设计 26
5.5 加工单元气动控制回路设计 26
第六章 软件程序设计 27
6.1 PLC的程序设计 27
6.2 Robot的程序设计 30
结束语 46
参考文献 47
毕业设计总结 48
致谢 49
英文翻译见另页
附录
第一章 引言
因为大多数的企业和工厂运作的权力,劳动都是一种最重要的生产要素,自古以来就有着不可或缺的地位。
However, in recent years, with the sharp rise in labor costs, enterprises lack of work and recruitment difficult problems have become increasingly prominent, especially in recent years, with the economic growth rate of decline increased the employment pressure, corporate survival is a great challenge. It faces two major difficulties: one is the enterprise labor costs continue to rise, including technical workers and ordinary workers wages are presented by quarter rise; two is the enterprise recruitment difficult problem is particularly prominent, and the structural characteristics and seasonal outburst, the main reason is that the new generation of migrant workers to improve the employment expectation. At the same time, along with the development of modern industry and constantly improve the level, demand for the product quality and production efficiency has been improved.
然而,近年来,随着劳动力成本的急剧上升,企业缺乏工作和招工难的问题日益突出,特别是近年来,随着经济增速的下降增加了就业的压力,企业的生存是一个巨大的挑战。其面临的两大困难:一是企业劳动力成本不断上升,包括技术工人和普通工人的工资是按季度上升了;二是企业招工难的问题尤为突出,其结构特征及季节性突出,主要的原因是,提高农民工的就业期望新一代。同时,随着现代工业的发展水平不断提高的需求,对产品的质量和生产效率的不断提高。
With the continuous progress of the world industry and the development of science and technology, the development speed of the industrial robot is accelerating, has become one of the three pillars of modern industry. In modern production, the manipulator is widely used in automatic production. It replaces manual labor in the simple sense, but a comprehensive electronic mechanical device of personification people's strengths and machine expertise, as a man of the state of the environment of rapid reaction and judging ability, and the machine can continue working, high precision, anti adverse circumstance ability long time. Production of mechanical hand can improve the automation level of production and labor productivity: can reduce labor intensity, to ensure the quality of products, to achieve safe production; especially in high temperature and high pressure, low temperature, low pressure, dust, explosive, toxic gases, radioactive and other harsh environments. The structure of the manipulator is relatively simple, specific and strong, to repeat work and labor, not tired, not afraid of danger, snatch heavy power than a human hand.
随着世界工业的不断进步和科学技术的发展,工业机器人的发展速度不断加快,已经成为现代工业的三大支柱。在现代化生产中,机械手被广泛应用于自动化生产。它取代了手工劳动的简单意义,而是一个综合的电子机械装置拟人的人的优势和机的专业知识,作为一个男人的快速反应和分析判断能力的环境的状态,和机器可以继续工作,精度高,抗恶劣环境的能力长时间。生产中应用机械手可以提高生产的自动化水平和劳动生产率:可以减轻劳动强度,保证产品质量,实现安全生产;尤其在高温、高压,低温,低压,粉尘,易爆,有毒气体,放射性等恶劣环境中。机械手的结构相对简单,特异性强,重复工作和劳动,不累,不怕危险,抢夺大功率比人的手。
第二章 设计的特点及意义
2.1机械手控制系统的特点
机器能够独立设计的程序,重复同样的程序完成操作,可以改变任务的不同类型的生产,具有较强的机械手的动作;控制精度高,操作灵活的高速传输传统的机械手,大约是三倍系统工作效率,柔性机械手,可以不需要适应不同环境,不同需求设计不同的控制结构,降低生产成本和设计周期和设备制造;PLC三菱Q系列高精度智能控制;使用传统的视觉检测的一代可以大大提高检测精度与检测更强大,能够承载更多的智能控制器的任务要求。机器人控制器的以太网LAN路由器,一个视觉的相互数据传输,更快和更liscio.fr-a700系列高性能矢量转换,具有高驱动性能,具有独特的无传感器矢量控制方式,无需采用编码器可在各种情况下机械设备运行在超低速高精度控制的区域差异,精度高,误差小;采用触摸屏为控制处理设备一套,使绘画操作更简单和更直观的控制。
2.2机械手控制系统设计的意义
High efficiency, flexible production design, fast and smooth data transmission, high precision control, intuitive control and simple operation, can adapt to the processing of high precision high production efficiency of the production requirements of enterprises, and enterprises to solve the employment difficult situation.
高效,灵活的产品设计,快速流畅的数据传输,控制精度高,直观的控制,操作简单,能适应高精度、高生产效率的企业生产要求的处理,和企业来解决就业难的现状。
参考文献
[1] 李俊秀. 电气控制与PLC应用技术[M]. 北京工业出版社,2010.
[2]王承义. 机械手及其应用[M].北京:机械工业出版社.1981.
[3] 许廖等. 电器控制与PLC控制技术[M]. 北京:机械工业出版社,2005.
[4] 廖常初. PLC编程及应用[M]. 北京:机械工业出版社,2008.
[5] 周亚军. 电气控制与PLC原理及应用[M]. 西安:西安科技大学出版社,2008.
[6] 罗志勇,罗萍,周丽芳,三菱FX/Q系列PLC工程实例详解[M].人民邮电出版社,2012
[7] 江永富、廖晓梅. 三菱PLC编程技术及工程案例精选[M]. 机械工业出版社, 2011.
[8]李允文. 工业机械手设计[M].北京:机械工业出版社.1994.
[9]周伯英.工业机器人设计[M].北京:机械工业出版社.1995.