

苏ICP备112451047180号-6
激光在线测径系统设计
【摘要】激光在线测径是对激光技术、计算机技术等多门技术的综合运用,因此集多种技术的优点于一身,比光学在线测径技术更精密。随着激光技术的日益成熟,激光在线测径的精度越来越高,应用得到不断推广,逐步扩展到国民生活的各个方面,在军事上也得到广泛的应用。
本文介绍了激光在线测径的三种方法,重点阐述了相位式激光在线测径的原理,着重介绍了相位式激光在线测径系统的电路组成,包括回波接收电路、数据采集及显示电路、激光发射电路等。在此在线测径系统中采用了自动数字测相的方法,从而有效的提高了测相的精度。每个系统都会或多或少产生误差,为了减小系统误差,对系统误差进行分析,并提出最佳解决方案,再次检测系统误差最终被控制在允许范围内。
【关键词】激光在线测径 相位测量 自动数字测相
目 录
引 言 1
第1章 绪 论 2
1.1 课题背景 2
1.2 激光在线测径技术的优点 2
1.3 激光在线测径技术的发展 2
1.4 本课题研究的主要内容 4
第2章 激光在线测径的原理 5
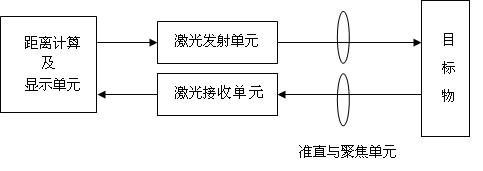
2.1 激光在线测径原理的介绍 5
2.2 激光在线测径方法综述 5
第3章 相位式激光在线测径系统的设计 8
3.1 设计方案的拟定 8
3.2 基本公式及频率选择 9
3.3 发射系统设计 10
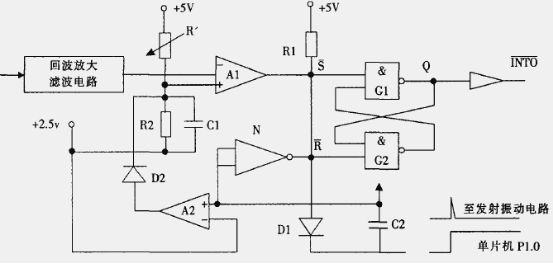
3.4 接收系统设计 14
第4章 数据处理与误差分析 24
4.1 数据采集与显示电路设计 24
4.2 程序实现 29
4.3 误差分析 30
结 论 33
参考文献 34
致 谢 36
附录Ⅰ:英文原文 37
附录Ⅱ:译文 44
引 言
光波早在人类以前就已经存在,自从有了人类以后,光波最早不被发现,直到人类技术逐步先进,光波才被利用。早在激光问世以前,强相干光的获得很难完成。二十世纪六十年代第一台红宝石激光器诞生,推动了激光技术的迅速发展,光学及其应用技术也得到了巨大的变革,许多相关学科也不断被完善。从此激光技术被认为是二十世纪最伟大的发明之一。
激光技术的不断发展,标志着光波应用技术进入一个崭新的阶段。激光技术主研究的主要内容有激光的产生、变换、传输、探测及其与物质的相互作用等内容。本设计中研究的主要内容是利用激光技术对距离进行测量。光学在线测径是在激光在线测径以前,被通常采用的在线测径方法。距离的改变会改变光学在线测径的精度,测量的距离越远,测量精度越差,一起的体积往往较大,导致操作也很复杂。但是相比之下,光学在线测径就不会存在这些问题,并且在线测径精度还很高,在目前来说是最受欢迎的在线测径方法。
相位法、干涉法、三角法和脉冲法是激光在线测径常用的方法。几乎社会生活的每个领域都要用到激光技术。可用于汽车防撞雷达,激光在线测径具有高数据率,行驶汽车在行驶时的速度,与障碍物之间距离,能被快速显示,减少交通事故,保证行车安全。其次,激光相位在线测径技术被广泛地应用在大地测量、地质勘探、水利工程、隧道施工等。本设计中主研究对静态物体进行在线测径,并且在线测径范围,相位式激光在线测径适合于短距离测量,并且测量精度高。因此,本设计选择相位式激光在线测径系统。
第1章 绪 论
1.1 课题背景
第一台红宝石激光器是1961年诞生,从这以后激光技术就被认为是对人类很重要的一项新技术。激光在线测径是多门技术的综合应用,它整合了激光技术,计算技术等多门技术的优点于一体。被广泛的应用在军事上,为各国军事储备和作战技术奠定了基础。
目前常用的在线测径方法有相位法、三角法、脉冲法和干涉法等,激光的特点有方向性强和单色性、相干性好等,这些特点奠定了激光在线测径的基础,可以做到高精度的检测、计量。
1.2 激光在线测径技术的优点
一、 在线测径精度高
激光在线测径系统的精度不受被在线测径离的影响,同时不同经验的操作者进行在线测径时也不会影响在线测径的精度。激光在线测径的精度高,战术激光在线测径的误差小于5m,实验室的话,在线测径误差会比战术在线测径误差小很多。
二、 在线测径仪体积小、重量轻
我们知道光学在线测径仪体积较大且笨重,在线测径时不方便操作,携带起来也很麻烦。不同于光学在线测径仪,激光在线测径仪体积较小。军事上装备的激光在线测径仪,重量一般为l0左右,最小的只有0.36。
三、 分辨率高、抗干扰能力强
激光在线测径仪的分辨率取决于窄的光束和短的脉冲宽度,而且电磁和地波无法干扰其分辨率。
仰角较低时,激光在线测径雷达的工作可以不受地面信号的干扰,从而测量结果不被影响,这样激光在线测径雷达可以正常反馈监测信息。微波雷达相比之下受到干扰就会比较严重,使监测数据不准确。有了激光在线测径雷达就不会再纠结地面信号的干扰。一些军用的坦克应用了激光在线测径仪以后其命中率得到大幅度提高,从而巩固了国防实力。
1.3 激光在线测径技术的发展
一、 激光在线测径仪分类
根据测量距离来分,激光在线测径仪可以被分为三大类[1][2]:
首先是短程激光在线测径仪,其测量距离是5km以内。测量高度不是很高及测量距离
在5km内的测量作业,都适合采用短程在线测径。
其次是远程或中长程激光在线测径仪,它的测量距离范围是5公里到几十公里不等。地震的发生具有随机性,为了准确监测地震发生情况,采用远程激光在线测径仪;地面有很多需要控制的因素,而这些因素分布不均,也采用此种方法测量。导弹发射距离很远,人造地球卫星离地面遥远这种测量属于远程及超远程激光在线测径的范畴。
二、 国内外概况
激光在线测径技术是现代探测最重要的一门技术,对军事和人们的生活领域影响较大。继世界上第一台激光在线测径机发明以后,被研发出来的还有用于军事的实验型激光在线测径机,经过试验,这种在线测径机性能可靠、稳定,可以后被运用到实际生活中,各种激光在线测径机为人类带来福利的同时,也取代了光学在线测径机,充分利用激光的优点,完成光学在线测径机不能完成的任务。
经过几十年的不断发展,军用激光在线测径机已经研制发展到了三代[3],其功能和测量精度不断提高。第一代激光在线测径机是最早问世的激光在线测径机,采用发射红外红宝石激光器和光电倍增管探测器, 1970年初期第一代激光在线测径机很快便被第二代激光在线测径机取代。在一代的基础上第二代激光在线测径机采用发射近红外铷激光器和硅光电二极管(或硅雪崩光电二极管)探测器。相对于一代来说各方面都很成功。二十世纪七十年代第一个手持使用的小型Nd:YAG激光在线测径机在美国成功问世,被称之为AN/GVS-5。人眼安全的激光在线测径机是第三代激光在线测径机。目前第三代激光在线测径机有工作波长为和三种不同类型。
三、 发展趋势
目前适合人眼安全的激光在线测径机分为三种[3]:
(1)激光在线测径机:激光在线测径机发射的激光为人眼安全范围内的波长。其优点有:其传输性能在烟雾中不受影响;兼容性好。缺点是:水蒸气能够吸收激光,对其影响较大;目标反射率较低;与Nd:YAG激光在线测径机相比其成本较高、体积较大和重量较重。
(2) 喇曼频移Nd:YAG激光在线测径机:这种激光在线测径机利用喇曼频移技术将Nd:YAG激光器波长的激光下频移为眼睛安全的波长的激光。其优点有: Nd:YAG泵浦激光输出的脉冲宽度比喇曼频移激光脉冲的要宽。这种激光在线测径机能以较高的重复频率工作。主要缺点有:受激后喇曼散射会产生一些不必要的非线性效应,使转换效率降低。
(3)饵玻璃激光在线测径机:饵玻璃激光在线测径机可以发射波长的激光。主要优点有:对于人眼安全性最高的激光波长是,不会损坏人眼。其次它的结构简单、便宜,手持比较方便,故得到广泛使用。其缺点主要表现在:工作复频率较低;效率低、阈值高;至今为止还没有适用的被动染料Q开关。
四、 激光在线测径的应用
军事史一个国家安全的保障,激光在线测径仪在军事上的应用大大提高了国防实力。随着车企的发展,车辆越来越多 ,从而交通事故也增加,为了减少事故发生率汽车上可以使用此技术,在行驶过程中随时测量与前后车之间的距离。激光在线测径技术具有的测量距离远,在线测径结果精度比一般在线测径仪高,这项技术被迅速应用到各种类型的在线测径机。侦查需要先进的、精密的仪器才能使侦查结果准确无误,而激光在线测径仪就能做到这点,将其应用在侦察设备中能有效的完成侦察任务。并且使使侦查更加容易且在线测径范围变大,在线测径精度提高。激光在线测径仪与其他在线测径仪相比具有在线测径精度高、在线测径速度快(在线测径时间1到2秒)、轻小灵活、测量距离数字显示、训练简单、操作容易等优点。激光在线测径仪已经被广泛应用于社会生活的各个领域。
当今,激光在线测径仪已经应用于交通事故现场的勘查,有效地提高了交通事故现场勘查效率和准确性。办案交警只需手持“莱卡PLUS型”激光在线测径仪瞄准目标轻轻一按,交通事故现场数据即可搞定。其次,为了降低交通事故很多汽车装置内具有激光探测仪,在行驶过程中可以精确测量与前面汽车车距。同时改变行车速度,大大降低了交通事故率。出现交通事故时,激光在线测径仪可以勘测现场,将现场测量数据发送到电脑,即使反映事故的状况。
1.4 本课题研究的主要内容
本课题要求设计一个激光在线测径系统,技术条件、技术参数要求为:
1、以静态物体为分析设计对象;
2、在线测径范围。
本设计研究的内容有:介绍各种激光在线测径的方法及原理;针对设计要求选择最佳的在线测径方法;相位式激光在线测径系统的电路设计;数据采集及显示部分的设计;误差分析;最后总结了论文所做的工作,以及今后的发展方向。
参 考 文 献
[1]刘国光.基于方波的相位式激光在线测径系统的研究.浙江大学.2004.6
[2]阎吉祥.激光原理技术及应用.北京.北京理工大学出版社.2006:289—293
[3]宋敏.远程激光在线测径控制系统的设计与研究.四川大学.2004.4
[4]黄震.脉冲激光在线测径接收电路与计时方法研究.浙江大学.2004.3
[5]任明冰.半导体脉冲激光在线测径机的硬件电路设计.南京理工大学.2004.2
[6]A.R. Jim enez and R. Ceres,A vision system based on a laser range-finder applied to robotic fruit harvesting,Machine Vision and Applications,2000:321-329
[7]A.D. Nizhenskii and V. B. Volkonskii,Phase-type laser range finder,Measurement Techniques,1984:127-129
[8]孔祥元,郭际明.控制测量学上册(第三版).武汉.武汉大学出版社.2006:138—139
[9]刘国光.基于方波的相位式激光在线测径系统的研究.浙江大学.2004.6
[10]刘明亮.振荡器的原理和应用.北京.高等教育出版社.1983:80—97
[11]曾兴雯,刘乃安,陈健.高频电路原理与分析(第三版).西安.西安电子科技大学出版社.2001:113—118
[12]黄瑞光,王建华,顾天龙,孙照炜.相位式光波在线测径仪.北京.地震出版社.1986:56—70
[13]孔祥元,郭际明.控制测量学上册(第三版).武汉.武汉大学出版社.2006:123
[14]陈惠兴.相位式光波在线测径仪.上海.上海科学技术出版社.1981:30—31
[15]江月松.光电技术与实验.北京.北京理工大学出版社.2000:138—140
[16]曾兴雯,刘乃安,陈健.高频电路原理与分析(第三版).西安.西安电子科技大学出版社.2001:191—204
[17]阳昌汉.高频电子线路.哈尔滨.哈尔滨工程大学出版社.2001:184—196
[18]谢自美.电子线路设计实验测试(第三版).武汉.华中科技大学出版社.2006: 145—155
[19]张国雄,金篆芷.测控电路.北京.机械工业出版社.2005:122
[20]孔祥元,郭际明.控制测量学上册(第三版).武汉.武汉大学出版社.2006:143—145
[21]I. V. Lukin and G. P. Pushkarev, High—precision differential—laser range finder, Measurement Techniques,1988:421-424
[22]王莲莲.高精度数字式相位差测量系统的研究.苏州大学.2006.4
[23]阎石.数字电子技术基础(第四版).北京.高等教育出版社.1998:339—355
[24]张毅坤,陈善久,裘雪红.单片微型计算机原理及应用.西安.西安电子科技大学出版社.1998:23—26
[25]王莲莲.高精度数字式相位差测量系统的研究.苏州大学.2006.4
[26]张毅坤,陈善久,裘雪红.单片微型计算机原理及应用.西安.西安电子科技大学出版社.1998:186—189
[27]邵珠法.高精度快速激光相位在线测径技术研究.电子科技大学.2005.3
[28]孔祥元,郭际明.控制测量学上册(第三版).武汉.武汉大学出版社.2006:158