














��ICP��112451047180��-6
����AT89C51������ң��С��ϵͳ�����
һ��ѡ���顢����
21�������ż���������ӡ���Ϣ�����Ŀ��ٷ�չ������һ�ʣ�����������������֪�������ڣ����ܻ�����Ѿ���Ϊ���������в��ɻ�ȱ��һ���֡������ֻ������ܵ��ӡ��ȵȡ���Щ�����ǵ�����������ſ���˵�ǰ�������Ҫ�Ľ�ɫ��
Ȼ������Щ��ֻ�������������С��һ���֡��������ܻ����������ٶ��������죬���̶ܳ��������ߣ���Ӧ�÷�ΧҲ�õ��˼������չ�����ܻ�����������������Ľܳ�����������Ҫ��·��ʶ�𡢽Ƕȿ��ơ��Լ�С���ٶȿ��Ƶȹ���ģ����ɡ������������ܻ����˼����ɿ췢չ����Ӧ���ھ��µ��ڶ�����õ��㷺��չ���������������м��͵������������ܻ����˼�����Ѹ�ٷ�չ��
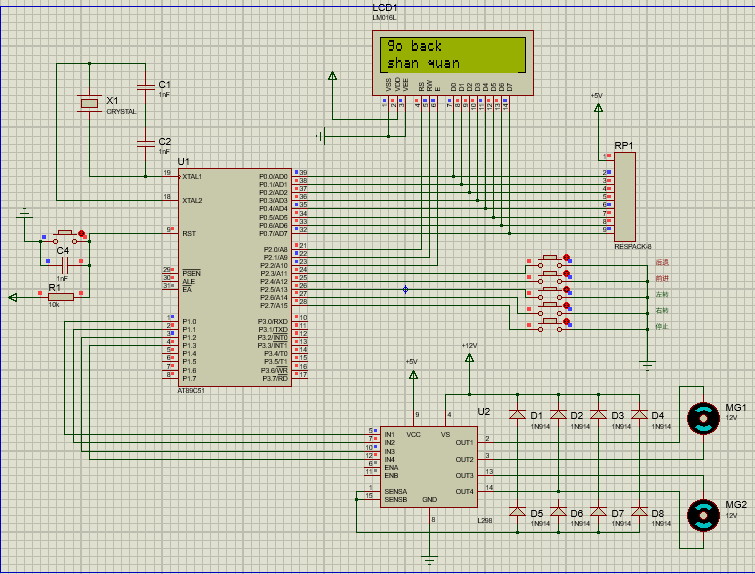
��������Ƶ�����ң��С���������ܻ����˵�һ��С����Ӱ�������AT89C51��Ƭ��Ϊ���壬��Ӻ�ң�ء�ѭ��ģ�飬���ֱ�������Ϊһ����ƶ��ɣ�����ģ�黯����Ʒ�����ʵ��С����ǰ�������ˡ���ת����ת����ʾ��������ֹͣ��
�������������������о�����Ҫ�о������ݣ�Ҫ��������⣬Ԥ��Ŀ�꣬�о����衢��������ʩ�ȣ�
��һ����Ҫ���ݣ�
�������������ܻ�����Ϊ������ݣ���AT89C51��Ƭ��Ϊ�����Լ�����ң�������ͳ�������������CPU����ɡ�LCD��ʾ��ң��С��Ҫʵ��ѭ�����У���ʾ�н����롢����ϰ����ܡ������Ҫͨ����ϵͳӲ����·����ƣ�������ƺͳ���ı�д��Ȼ�����Ӳ����·��������ƣ������Protues��������ʵ�֡�
��������������Ҫ���⣺
1.ң��С��������ṹ���;
2.ң��С����Ӳ�����ɼ����Ƶ�·ģ�����ƣ�
3.ң��С������ϵͳ��������ƣ�
4.��������ѡ��
5.���ֱ����������
6.Protues����������������
������Ԥ��Ŀ�꣺
������Ŀ�����Ҫ�����ʵ������Ҫ��
��1������ң�ع��ܣ���ͣ���Զ����ֶ���
��2��С���ܹ�ǰ���ֱ���н���
��3��С���ܹ������������ߣ��궨�ߣ��н���
��4��С�����в����Ϲ��ܣ����н��������ܹ����ǰ���ϰ���ľ��벢�������ϰ���Ӵ���
��5�������г���¼���ܣ���ʾ�н����룻
��6��LEDָʾ�����������繦�ܡ�
���ģ��о����裺
������Ĺ�����������½Σ�
��һ�Σ��������ס��ռ����ϡ�ȷ�����ⷽ������ɿ��ⱨ�棻
�ڶ��Σ�ѧϰQTI���������ȴ�������
�����Σ����ϵͳ���ܣ����нṹ���
���ĽΣ�����Protues�����������沢���м�⣻
����Σ������������ϣ���ɱ�ҵ������ĺʹ�硣
���壩������������ʩ:
������������������Ҫ����ʵ�鷨��
�� ʩ������Ŀǰ����ѧ�γ��Լ�ʵѵ�����ʵ�����飬�ڽ�ʦ��ָ���£���AT89C51��Ƭ��Ϊ���ģ���ƿ�������ң��С������������Ҫ��ʵ�ֿ���Ҫ��
Ŀ¼
��һ�� ���� 11
1.1 ���ܻ����˵ķ�չʷ����״ 11
1.2 ��������Ŀ�ĺ���Ҫ���� 13
�ڶ�������ң��С������ṹ����� 13
2.2 ������Ʒ��� 13
2.2 ����оƬ 14
2.3 ѭ��ģ���ѡ�� 14
2.4 �������ģ���ѡ�� 15
2.5 ���ϲ��ģ���ѡ�� 15
2.6 ��ʾģ���ѡ�� 16
2.7 ��Դģ�� 16
������ Ӳ����·��� 17
3.1 ���ص�·����� 17
3.1.1 AT98C51��Ƭ���ļ�� 17
3.1.2 ��Ƭ������Сϵͳ 19
3.2 ����ң��ģ��ĵ�·��� 20
3.2.1 ����ң�صĻ������� 20
3.2.2 ����ң�ص�ʵ��ԭ�� 20
3.2.3 ���ⷢ���� 21
3.2.4 ��������� 22
3.3 �������ģ����� 22
3.4 ѭ��ģ����� 23
3.5 ��ʾģ����� 24
3.6 ���ϲ��ģ����� 25
������ ϵͳ������� 27
4.1 ѭ��ģ����� 27
4.2 LCD��ʾ���� 30
4.3 ���������ϳ��� 34
������ ϵͳ������� 35
5.1 ���Ʒ����· 35
5.2 ����Ľ��� 36
������ �ܽ���չ�� 38
��¼һ ϵͳӲ����·ͼ 40
��¼�� ������� 41
ժҪ��21�������ż���������ӡ���Ϣ�����Ŀ��ٷ�չ������һ�ʣ�����������������֪�������ڣ����ܻ�����Ѿ���Ϊ���������в��ɻ�ȱ��һ���֡������ֻ������ܵ��ӡ��ȵȡ���Щ�����ǵ�����������ſ���˵�ǰ�������Ҫ�Ľ�ɫ��
����ֻ�������������С��һ���֡��������ܻ���ҵ�Ŀ��ٷ�չ�����ܻ����Ե���ߣ�ʹ�����˳�Ϊ�ܶ�������ij����������������ܻ����˼����ɿ췢չ����Ӧ���ھ��µ��ڶ�����õ��㷺��չ���������������м��͵������������ܻ����˼�����Ѹ�ٷ�չ��
��������Ƶ�����ң��С���������ܻ����˵�һ��С����Ӱ�������AT89C51��Ƭ��Ϊ���壬����ң�ء�ѭ��ģ�飬��Ϊһ����ƶ��ɣ�����ģ�黯����Ʒ�����ʵ��С���IJ�ࡢѭ������ࡢ����ң�ء�
�ؼ��֣����ܣ�����ң�أ����
�����
[1] �����ԣ����ִ����Ӽ�����[J] .����С���Ķഫ���������ں�.2005
[2] ��������Ƭ����Ƕ��ʽϵͳӦ�á�[J].����HCS12��С�����ܿ���ϵͳ��ƣ�2007
[3] ̷��ǿ.��C������ơ�.�������廪��ѧ�����磬2005,7
[4] ���������������硷[J].�綯С����ѭ����2004
[5] ����������÷.��Ƭ��ԭ����Ӧ�ã�M��.���ӿƼ���ѧ���棬1998,12
[6] ��ƾ������������⼼��[M].���ӹ�ҵ�����磬2007
[7] ������.��Ƭ��ԭ����Ӧ�ý̳� .��е��ҵ�����磬2003,7
[8] �����Σ�����������Ƭ��ԭ����Ӧ��[M].���ӹ�ҵ������,2006
[9] ������Ƭ�������̳�[M].�������պ����ѧ�����磬1999
[10] �ܽ���. Protel99 SE.��������е��ҵ�����磬2007
[11] ֣��������Ƭ��ԭ����Ӧ��.�Ĵ���ѧ����ţ�2003
[12] ¬�����·Ƿ����Ÿ߷ɵ�.���ڵ�Ƭ������ˢֱ���綯������ϵͳ���.������е��ҵѧԺѧ����2002,10
[13] ���࣬������.���ʽ��������Ӧ���뷢չ[J].�Ƽ��鱨�����뾭�ã�2007
[14] �ܿ���.���ڵ�Ƭ���ĺ���ң���������������ʵ��[J].Ӧ���о���2010
[15] ���崿.��־��.���ڵ�Ƭ��ϵͳ�ĺ���ң����Ӧ��[J].�ִ�������2004
[16] ������.8051��Ƭ��C���Գ���Ӧ��[M].��ѧ�����磬2002
[17] ������.51��Ƭ��C���Խ̳�.���������ӹ�ҵ�����磬 2009