��ICP��112451047180��-6
���ڵ�Ƭ�����Ƶ�Ųɼ��źŵ�����С��Ӳ�����
Abstract
The main content of this paper is to use the 32-bit SCM freescale company Kinetis10, in particular the runway design can trace the car driving on intelligence. Intelligent car system to Kinetis10 as the core, and use it to signal acquisition, data transmission and computing such action and create PWM wave to control the steering gear and motor. The whole system of microcomputer module, path recognition module, speed detection module, steering gear module, dc motor driver module, power supply module.
Intelligent car of hardware design including: two-way control motor drive, but at the same time for more power supply module of the power supply system, 3.3 V PWM waves of steering gear drive circuit, and the upper machine RS232 communication module of communication, etc.
Key word: Intelligent vehicles, Kinetis10, Power system, Two-way control.
һ�� ���������
ʱ���ı�Ǩ���Ƽ��Ľ������Զ����豸��������ǵ����ܡ������о�����ĿΪ�˿�����С���Զ�ʶ���·���Ӷ�ʵ��������ʻ���ÿ��⺭���˿��ơ����ӡ�������������ȶ��ѧ�Ƶ�֪ʶ���ٽ��˸ߵ�ѧУ���ʽ����������˴�ѧ������ѧ֪ʶ���ۺ����������Լ�������ʶ�붯��������
�������ǻ��ڵ�Ƭ�����Ƶ�Ųɼ��źŵ�����С��Ӳ����ƣ��Դ˵��о��ڿ����о���ʵ���������涼���пɹ۵ļ�ֵ��С�������в��õ�Ÿ�Ӧԭ����ͨ�������ĸ�Ӧ�綯�������ų�ǿ���Լ����Ӷ���þ��뵼�ߵ�λ�ã����õ�Ÿ�Ӧ����С��������
�����������о���״
�ܽ������ߵȽ���˾ί�У��ߵ�ѧУ�Զ���רҵ��ѧָ��ίԱ�Ḻ������ȫ����ѧ�����ܳ���������������Ѿ���������������ȫ�������֮һ��Ŀǰ�������Ѿ�����������������ʱ�����������ܣ��������ӣ��⽫�Ƿdz�����г���Ȩ������Ԥ���г���ģ����������Ԫ������г������ž����ҵ���������ܻ���ͳ���ԽBAT���������й������о�Ĵ����˲�Ⱥ�塢�����IJ�ҵ����������Ӳ������ӵ�о�����ƣ���Ҳ��“2015��˼��������Ӳ����ƴ���"�ٰ�IJ�ҵ������
��“��˼����”��ȫ����ѧ�����ܳ���������2006�����廪��ѧ�ɹ��ٰ죬�������£��ں����Ѿٰ����죬��רҵ֪ʶ�漰���ơ�ģʽʶ�𡢴��м������������ӡ����������������е�����ѧ�ƣ���ѧ����֪ʶ��Ǣ�Ͷ����������������Ըߵ�ѧУ���Ƽ���������ѧ��ѧ��ˮƽ����ߣ��������õ��ƶ����á�
������ѧ������ģ�ͳ������Ǻ���������ѧ��������ʵ�����ڷ�˼�����뵼�幫˾�������¾ٰ����HCS12��Ƭ��Ϊ���ĵĴ�ѧ������Ƽ���������ί���ṩһ����������ģ�͡�ֱ������Ϳɳ��ʽ��ء���������Ҫ����һ���ܹ�����ʶ��·�ߵ����ܳ�����ר����Ƶ��ܵ����Զ�ʶ���·��ʻ����������������ʱ��̣����Ҽ����������ֽϸߵIJ���������ʤ�����������µ����꿪չ�������������ڴ�ѧ������������������ߣ����ڸ�У���ѧ������ѧ��ˮƽ������Ҳ��һ�����������ս�������������ҵ���������£��õ���ҵ���Ͽɡ����������ں����ijɹ�֤����һ�㡣2000�����ܳ����������ɺ���������ѧ�а쿪չ������ÿ��ȫ����Լ��100��֧��ѧ�����鱨������������õ����ڶ��У�ʹ�ѧ���Ļ�ӭ��Ҳ�õ�����ҵ��ļ����ע��
����������˼�����뵼�幫˾����ٰ�����ܳ��������˽�һ���ķ�չ��2008��12��13�շ�˼�����뵼������������UITM����ѧԺ�ٰ������˼�������ܴ���������26�飬�漰Լ52����ѧ������10���ط���ѧ�μ����������������ù��������������ǿ�Э�ٰ졣
��������������
�������ǻ��ڵ�Ƭ�����Ƶ�Ųɼ��źŵ�����С��Ӳ��ϵͳ����ƣ��Դ˵��о��ڿ����о������ʵ���������涼�пɹ۵ļ�ֵ��ͨ�����������յ���źţ���������������������������Ƕ��ʽϵͳ�Բɼ�������Ϣ���з�����������������ģ�͵���ʻ���ɴ����������ĵ���źţ�������Ƭ����A/Dת���������ֲ�������������·��Ϣ�洢��Ƭ��Flash�У�֮��������㴦�����Ѵ������ͨ��PWM��CAN������������ƻ����ϣ���������ģ�͵İ�ȫ��ƽ�����С�
�ġ��о�����
��1��ͨ�����磬�鼮���ݲ���������ϣ�
��2�������ⱨ��Ϳ����磻
��3���ܽ����ϲ�ȷ�����Ľṹ��
��4��ȷ�����ĵ���Ʒ�����
��5���������ݼ�⡢�ռ�����Ƽ������·�ȣ�
��6����Ƭ������Ӳ��ʵ�ּ�������̣����Լ�ϵͳ���棻
��7���������������ݲ������ģ�
��8����ͼ������������ݣ�����硣
�塢�ο�����
[1]����. ���л��������˼�ʻ�����˶����Ʒ������о�[D]. �й���ѧ������ѧ��2012.
[2]�۱���. ѧ�����ܳ�. �������պ����ѧ�����磬2007.
[3]���нܣ�������. ���ܿ�������[J]. ���ƹ��̣�1998��(6)��1-6.
[4]����. ���˼�ʻ������������ȫ�������������[J]. ����������, 2014, (19).
[5]���.ѧ�����ܳ�——��ս“��˼����”��.�������պ����ѧ������, 2007.
[6]���Ⱥ�. ����С��������Ƶ��о���ʵ��[D]. �����ѧ, 2014.
[7]��ʿ��, ������. �ִ������ij��ֶ�λ�������[J]. ����ά��������, 1998��(6)��12-15.
[8]��˼������˾. MC9S12XS128 REFERENCE MANUAL. 2008.
[9]��һ��. ������������——CMOS������ͷ[J]. ��������, 1999, (1)��47-47.
[10]��ΰ, �ž���. PID�����Ƚ�������������[J]. �Զ���ѧ��, 2000, 26(3)��347-355.
[11]Pop H F, Sârbu C, Chem. A. A new fuzzy regression algorithm.[J]. Analytical Chemistry, 1996, 68(5):771-778.
[12]��ʿ�£�ģ������·���ƺ����ܿ����ۣ���������ҵ��ѧ�����磬1998
[13]Fritzke B. Fast learning with incremental RBF Networks[J]. Neural Processing Letters, 1994, 1(1):2-5.
[14]������. �Ƚ�PID���Ƽ���MATLAB����. ���ӹ�ҵ������, 2003.
[15]��������������. ����PID���Ƽ���Ӧ��[M]. ����:��е��ҵ������. 1998.
ժ Ҫ
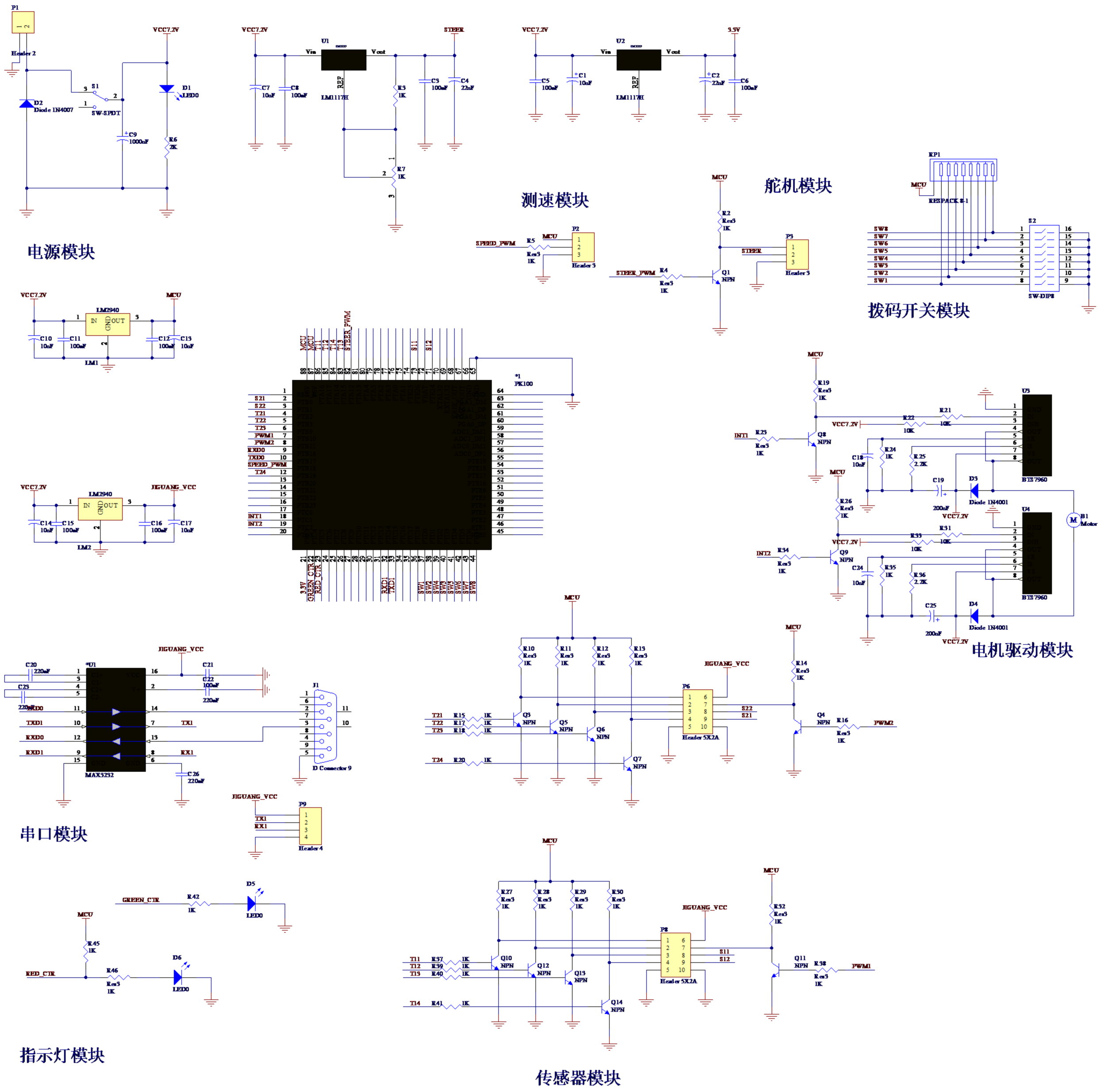
���ĵ���Ҫ���������÷�˼������˾��32λ��Ƭ��Kinetis10����������ض��ܵ���ѭ����ʻ������С�������ܳ�ϵͳ��Kinetis10Ϊ���ģ������������źŲɼ������ݴ���������ȶ�����������PWM�����ƶ���͵��������ϵͳ�ɵ�Ƭ��ģ�顢·��ʶ��ģ�顢�ٶȼ��ģ�顢���ģ�顢ֱ���������ģ�顢��Դģ�����ɡ�
����С����Ӳ����ư�����˫����Ƶĵ����������ͬʱ�Զ�ģ�鹩��ĵ�Դϵͳ��3.3V PWM�������������·������λ��ͨ�ŵ�RS232ͨ��ģ��ȡ�
�ؼ��֣�����С����Kinetis10����Դϵͳ��˫����ơ�
���ĵ���Ҫ���������÷�˼������˾��32λ��Ƭ��Kinetis10����������ض��ܵ���ѭ����ʻ������С�������ܳ�ϵͳ��Kinetis10Ϊ���ģ������������źŲɼ������ݴ���������ȶ�����������PWM�����ƶ���͵��������ϵͳ�ɵ�Ƭ��ģ�顢·��ʶ��ģ�顢�ٶȼ��ģ�顢���ģ�顢ֱ���������ģ�顢��Դģ�����ɡ�
����С����Ӳ����ư�����˫����Ƶĵ����������ͬʱ�Զ�ģ�鹩��ĵ�Դϵͳ��3.3V PWM�������������·������λ��ͨ�ŵ�RS232ͨ��ģ��ȡ�
�ؼ��֣�����С����Kinetis10����Դϵͳ��˫����ơ�
Abstract
The main content of this paper is to use the 32-bit SCM freescale company Kinetis10, in particular the runway design can trace the car driving on intelligence. Intelligent car system to Kinetis10 as the core, and use it to signal acquisition, data transmission and computing such action and create PWM wave to control the steering gear and motor. The whole system of microcomputer module, path recognition module, speed detection module, steering gear module, dc motor driver module, power supply module.
Intelligent car of hardware design including: two-way control motor drive, but at the same time for more power supply module of the power supply system, 3.3 V PWM waves of steering gear drive circuit, and the upper machine RS232 communication module of communication, etc.
Key word: Intelligent vehicles, Kinetis10, Power system, Two-way control.
һ�� ���������
ʱ���ı�Ǩ���Ƽ��Ľ������Զ����豸��������ǵ����ܡ������о�����ĿΪ�˿�����С���Զ�ʶ���·���Ӷ�ʵ��������ʻ���ÿ��⺭���˿��ơ����ӡ�������������ȶ��ѧ�Ƶ�֪ʶ���ٽ��˸ߵ�ѧУ���ʽ����������˴�ѧ������ѧ֪ʶ���ۺ����������Լ�������ʶ�붯��������
�������ǻ��ڵ�Ƭ�����Ƶ�Ųɼ��źŵ�����С��Ӳ����ƣ��Դ˵��о��ڿ����о���ʵ���������涼���пɹ۵ļ�ֵ��С�������в��õ�Ÿ�Ӧԭ����ͨ�������ĸ�Ӧ�綯�������ų�ǿ���Լ����Ӷ���þ��뵼�ߵ�λ�ã����õ�Ÿ�Ӧ����С��������
�����������о���״
�ܽ������ߵȽ���˾ί�У��ߵ�ѧУ�Զ���רҵ��ѧָ��ίԱ�Ḻ������ȫ����ѧ�����ܳ���������������Ѿ���������������ȫ�������֮һ��Ŀǰ�������Ѿ�����������������ʱ�����������ܣ��������ӣ��⽫�Ƿdz�����г���Ȩ������Ԥ���г���ģ����������Ԫ������г������ž����ҵ���������ܻ���ͳ���ԽBAT���������й������о�Ĵ����˲�Ⱥ�塢�����IJ�ҵ����������Ӳ������ӵ�о�����ƣ���Ҳ��“2015��˼��������Ӳ����ƴ���"�ٰ�IJ�ҵ������
��“��˼����”��ȫ����ѧ�����ܳ���������2006�����廪��ѧ�ɹ��ٰ죬�������£��ں����Ѿٰ����죬��רҵ֪ʶ�漰���ơ�ģʽʶ�𡢴��м������������ӡ����������������е�����ѧ�ƣ���ѧ����֪ʶ��Ǣ�Ͷ����������������Ըߵ�ѧУ���Ƽ���������ѧ��ѧ��ˮƽ����ߣ��������õ��ƶ����á�
������ѧ������ģ�ͳ������Ǻ���������ѧ��������ʵ�����ڷ�˼�����뵼�幫˾�������¾ٰ����HCS12��Ƭ��Ϊ���ĵĴ�ѧ������Ƽ���������ί���ṩһ����������ģ�͡�ֱ������Ϳɳ��ʽ��ء���������Ҫ����һ���ܹ�����ʶ��·�ߵ����ܳ�����ר����Ƶ��ܵ����Զ�ʶ���·��ʻ����������������ʱ��̣����Ҽ����������ֽϸߵIJ���������ʤ�����������µ����꿪չ�������������ڴ�ѧ������������������ߣ����ڸ�У���ѧ������ѧ��ˮƽ������Ҳ��һ�����������ս�������������ҵ���������£��õ���ҵ���Ͽɡ����������ں����ijɹ�֤����һ�㡣2000�����ܳ����������ɺ���������ѧ�а쿪չ������ÿ��ȫ����Լ��100��֧��ѧ�����鱨������������õ����ڶ��У�ʹ�ѧ���Ļ�ӭ��Ҳ�õ�����ҵ��ļ����ע��
����������˼�����뵼�幫˾����ٰ�����ܳ��������˽�һ���ķ�չ��2008��12��13�շ�˼�����뵼������������UITM����ѧԺ�ٰ������˼�������ܴ���������26�飬�漰Լ52����ѧ������10���ط���ѧ�μ����������������ù��������������ǿ�Э�ٰ졣
��������������
�������ǻ��ڵ�Ƭ�����Ƶ�Ųɼ��źŵ�����С��Ӳ��ϵͳ����ƣ��Դ˵��о��ڿ����о������ʵ���������涼�пɹ۵ļ�ֵ��ͨ�����������յ���źţ���������������������������Ƕ��ʽϵͳ�Բɼ�������Ϣ���з�����������������ģ�͵���ʻ���ɴ����������ĵ���źţ�������Ƭ����A/Dת���������ֲ�������������·��Ϣ�洢��Ƭ��Flash�У�֮��������㴦�����Ѵ������ͨ��PWM��CAN������������ƻ����ϣ���������ģ�͵İ�ȫ��ƽ�����С�
�ġ��о�����
��1��ͨ�����磬�鼮���ݲ���������ϣ�
��2�������ⱨ��Ϳ����磻
��3���ܽ����ϲ�ȷ�����Ľṹ��
��4��ȷ�����ĵ���Ʒ�����
��5���������ݼ�⡢�ռ�����Ƽ������·�ȣ�
��6����Ƭ������Ӳ��ʵ�ּ�������̣����Լ�ϵͳ���棻
��7���������������ݲ������ģ�
��8����ͼ������������ݣ�����硣
�塢�ο�����
[1]����. ���л��������˼�ʻ�����˶����Ʒ������о�[D]. �й���ѧ������ѧ��2012.
[2]�۱���. ѧ�����ܳ�. �������պ����ѧ�����磬2007.
[3]���нܣ�������. ���ܿ�������[J]. ���ƹ��̣�1998��(6)��1-6.
[4]����. ���˼�ʻ������������ȫ�������������[J]. ����������, 2014, (19).
[5]���.ѧ�����ܳ�——��ս“��˼����”��.�������պ����ѧ������, 2007.
[6]���Ⱥ�. ����С��������Ƶ��о���ʵ��[D]. �����ѧ, 2014.
[7]��ʿ��, ������. �ִ������ij��ֶ�λ�������[J]. ����ά��������, 1998��(6)��12-15.
[8]��˼������˾. MC9S12XS128 REFERENCE MANUAL. 2008.
[9]��һ��. ������������——CMOS������ͷ[J]. ��������, 1999, (1)��47-47.
[10]��ΰ, �ž���. PID�����Ƚ�������������[J]. �Զ���ѧ��, 2000, 26(3)��347-355.
[11]Pop H F, Sârbu C, Chem. A. A new fuzzy regression algorithm.[J]. Analytical Chemistry, 1996, 68(5):771-778.
[12]��ʿ�£�ģ������·���ƺ����ܿ����ۣ���������ҵ��ѧ�����磬1998
[13]Fritzke B. Fast learning with incremental RBF Networks[J]. Neural Processing Letters, 1994, 1(1):2-5.
[14]������. �Ƚ�PID���Ƽ���MATLAB����. ���ӹ�ҵ������, 2003.
[15]��������������. ����PID���Ƽ���Ӧ��[M]. ����:��е��ҵ������. 1998.
Ŀ¼
1 ���� 1
1.1ѡ������ 1
1.2 ������ſ� 1
1.2.1����ſ� 1
1.2.2 ���ڸſ� 2
1.3���ܳ��ķ�չǰ�� 3
2 ϵͳ��Ƽ�������֤ 3
2.1 ϵͳ���Ҫ�� 3
2.2 ϵͳ��Ʒ��� 3
2.2.1 ����оƬ��ѡ�� 4
2.2.2 ������ģ�� 4
2.2.3 ���ٴ�����ģ�� 5
2.2.4 ת����ģ�� 5
2.2.5�������ģ�� 5
3 ����оƬ��� 6
3.1 Kinetis K10��� 6
3.2 ����ģ���� 6
3.2.1 PWM ģ�� 7
3.2.2 PITģ�� 7
3.2.3 I/Oģ�� 7
3.2.4 SCIģ�� 7
4 ���ܳ���е��Ƽ���װ 7
4.1 ����İ�װ 8
4.2 ǰ����ǵĵ��� 8
4.3 ���ֲ�ֵĵ��� 9
4.4 �ٶȼ��ģ�鰲װ 9
4.5 �������İ�װ 9
5 �����·��� 9
5.1 ����оƬ��· 9
5.2 ��Χ��· 11
5.2.1 ��Դ����ģ�� 11
5.2.3 �ٶȼ���· 15
5.2.4 ���������· 16
5.2.5���뿪�ص�· 17
5.2.5 RS232ͨ��ģ�� 17
6 ������� 18
6.1 �������� 18
6.2 ��������ͼ 18
7 �ܽ� 19
8 ��л 20
����� 21