


苏ICP备112451047180号-6
基于视觉检测手机锂电池正负极的距离
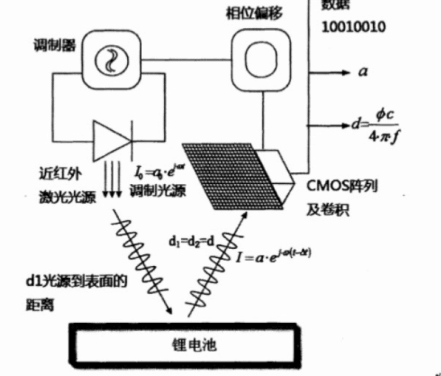
摘要:专家们尝试用摄像机获取周围环境系统信息并转之为数字信号,用计算机对图像的信息进行处理转换,形成了一种新型的学科--计算机视觉(机器视觉)。机器视觉的用途是将三维空间立体的图像信息转换成二维平面的图像信息,方便人们对图像进行处理。与此同时,三维的空间图像被转换成二维的平面图像信息以后,人们可以对二维平面图像进行操作和处理,从而得到物体在三维空间里的空间坐标以及运动轨迹。
关键词:信号转换; 视觉检测 ;图像信息
目录
摘要、关键词 1
一、 绪论 2
1.1课题的背景及意义 2
1.2机器视觉的发展方向 2
1.3机器视觉的实际应用 3
1.4本章小结 3
二、 系统整体方案设计 4
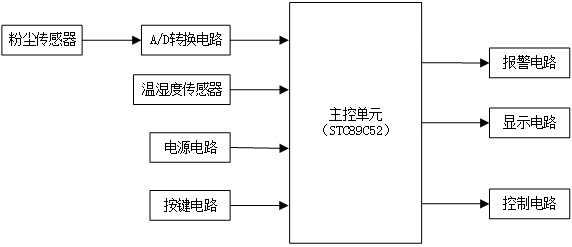
2.1测量系统的组成 4
2.2运作流程 6
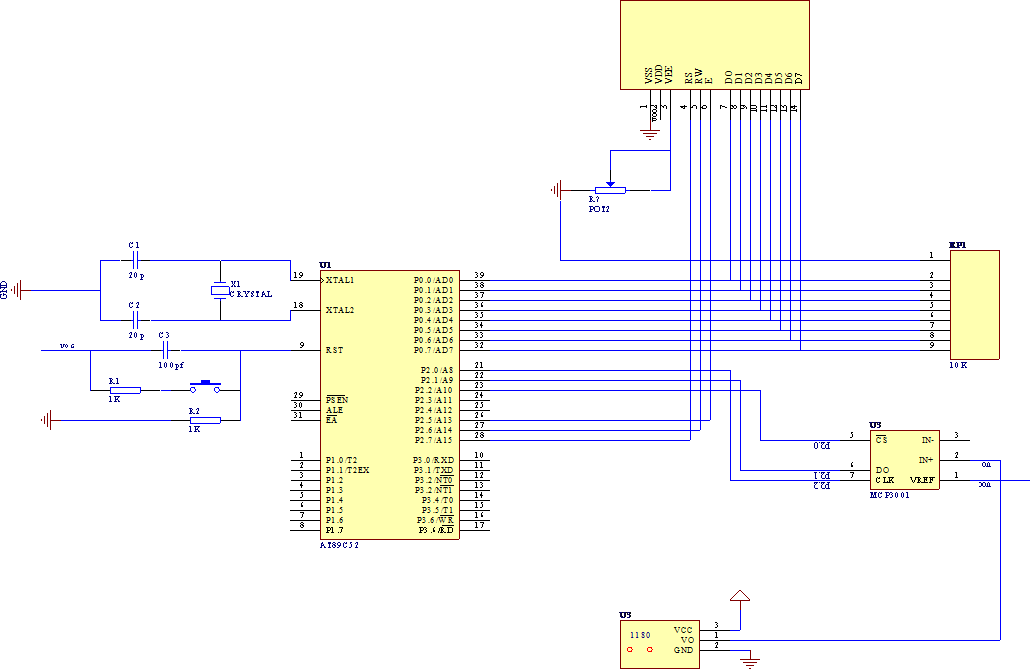
2.3硬件整体设计 7
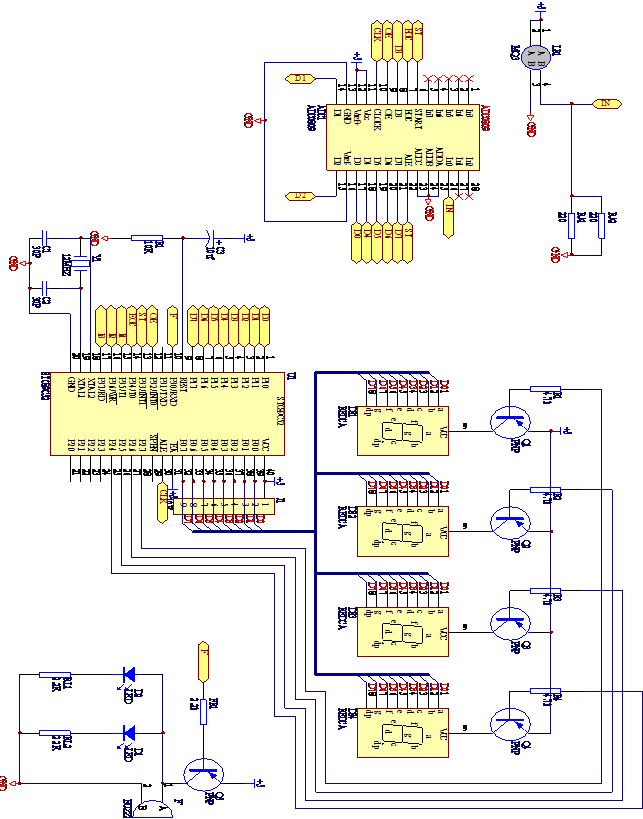
2.3.1电池检测平台运动控制卡 7
2.3.2运动控制卡原理 8
2.3.3图像采集卡 9
2.3.4图像获取用相机 10
2.3.5相机分辨率 11
2.3.6本系统采用的相机 11
2.3.7镜头的相关术语 12
2.3.8光源 13
2.4本章小结 14
三、运动控制软件设计 15
3.1程序开发步骤 15
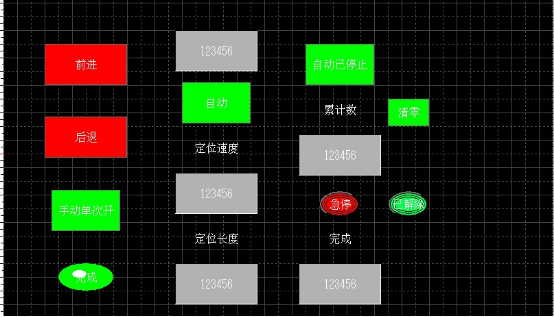
3.2运动控制界面 15
3.3本章小结 15
四、相机标定原理及方法 16
4.1普通相机的标定原理 16
4.1.1针孔模型 16
4.1.2径向畸变 16
4.2常用的标定方法 16
4.2.1 Tsai摄像机标定方法 16
4.3二维标定 16
4.4本章小结 17
五、 3D相机标定以及测量原理 18
5.1三维视觉系统结构 18
5.2 3D相机的标定原理 18
5.3 3D测量的工作原理 19
5.4本章小结 19
六、锂电池的图像特征提取 20
6.1图像边缘 20
6.2拉普拉斯算子边缘检测 20
6.3平滑滤波器 21
6.4梯度边缘检测 21
6.4.1梯度 21
6.4.2边缘检测算子 21
6.4.3 Canny准则 23
6.5本章小结 24
七、调试 24
7.1测量系统的调试 24
7.2数据分析 24
7.3本章小结 25
八、总结 25
参考文献 26
一、 绪论
1.1课题的背景及意义
以往的手机锂电池正负极距离测量,是工人们用手工使来检测的。对于一些小的生产企业来说这样的做法是勉强可以的,测量出来的电池的质量也基本能得到保障,因为产量比较小也不用赶时间,但是这种传统的测量已将渐渐不能跟上现代高速运转的时代的发展的步伐了。这种老方法想要做出很多电池的话,花费的时间较长,工人们做太多重复枯燥的事情很容易产生疲劳就会粗心大意,不能够保证测出来的电池的质量。而且产量渐渐增多,工人的数量也要渐渐增加,人力成本也会因此增加,所以必须有一种新型的检测方法替代这种手工的测量。
本课题的主要目的是利用视觉测量系统解放利用双手测量手机电池正负极距离。正常的测量过程是工人拿测量工具卡尺测量得到距离,而视觉检测设备,主要是通过对手机电池电极处的图像进行信息,然后再利用图像处理软件算出电池正负极的距离。在测量中对测量数据的精确性都有相对严格的要求,手机电池本身就很迷你,正负极距离更是仅有几毫米的差距,所以在研究中,精确度是很重要的点。
此课题来自于我的指导老师景鑫老师,景老师是我们自控系一名优秀的导师,负责指导我们的毕业设计论文。制作这个课题的原因也是因为越来越完善日的信息化时代和快速发展的电子技术,传统的手工已经不能满足生产的需求,为了提高生产效率同时提高精确度,解放劳动力,为企业创造最大化利益而制作此次课题。
1.2机器视觉的发展方向
机器视觉现在的应用并不是很广泛但是留心身边,仍然可以发现在很多生产生活中都已经在实际应用了。机器视觉的发展前景是我们现在无法想象的,不过依据现在的发展,我估测它的发展方向是:
(1)自标定
为了保证仪器测量的时候能够保证一定的的精确性,在正式使用之前要完成一个自标定的过程。但是呢由于标定的过程比较繁琐,机器还不能独自进行自我的标定,所以现在的大部分标定过程还是由人工测量,但是今后的发展趋势希望机器能够替代复杂繁琐的手工标定。
(2)模糊测量
视觉测量主要就是为了掌握物体的一些基本的特点。但有些生产过程中只需要得知是否有物体存在或者别的一些不重要的特征,所以这种情况我们便不用去考虑测量的精确性了,只需要测量一些相对模糊一点的信息即可。
(3)连续图像的测量
现在机器视觉的测量都能够对单一的一幅图像进行测量。今后的发展将会对连续几幅图像或全景图进行测量。
(4)摆脱单一性
简单的使用一台机器视觉,得出来的结果可能不会那么精确,如果与其它机器视觉合作相连,可以获得比较准确的结果。
1.3机器视觉的实际应用
机器视觉近些年发展的比较迅速,相关的一些设备也被应用到实际的工业生产过程中了,如食品安全检测,制造业,流水生产线等。
1.4本章小结
本个章节主要介绍了机器视觉的发展和应用,还对机器视觉未来的发展方向进行了预测。
总结
经过这么久的努力,终于完成了这篇利用视觉检测手机电池正负极距离的论文了。在完成这篇论文的过程中,我收获了很多的知识,学习到了很多的东西,例如我知道了相机的标定是依据的什么样的一个原理,也知道了相机是如何完成标定的。了解到了什么叫做图像的径向畸变,也知道了怎么去解决图像的畸变产生。还知道了怎么去求出图像的边缘,怎么样求出的额边缘是最清晰最没有瑕疵的,还知道了怎么去消除图像的噪声。
本次实验中我们使用的是图像软件来测量电池正负极的距离,是把拍出的图像的信息转化成数字信息,然后计算得出正负极之间的距离来。
在进行实验的时候,设备有时会出现一些问题和故障,有一部分原因还是我们的设计存在着不合理的地方,但是这些问题最终都被我们一一解决了。
参考文献
[1]杨东辉 期刊非正常行为的模式识别 哈尔滨大学硕士论文 2009
[2]赵鹏 机器视觉理论与应用 北京 电子工业出版社 2011
[3]曲学军 张鹏 基于双目视觉的三维测量方法、计算机仿真2011
[4]毛罕平 李明喜 基于多源机器视觉信息融合的番茄目标匹配,农业工程学报2009(10)
[5] 蒋焕煜 施经辉任烨机器视觉在幼苗自动转移体作业中的应用 农业工程学报2009(5)127-130
[6] 王荣本 纪寿文 初秀民 基于机器视觉的玉米施肥智能机器系统设计概述 农业工程学报 2001
[7]邹彦 DSP原理及应用 北京 电子工业出版社 2005 2-17
[8]张媛媛 模数转换器的设计与研究 北方工业大学 硕士论文
[9]张筱楠 FPGA中可编程逻辑单元的设计与研究 西安电子科技大学 硕士论文 2009
[10]阎石 数字电子技术基础 第五版 北京 高等教育出版社 2008 422-434
[11]郎东平 CCD数字相机图像采集卡的研究与实现 南京航空航天大学 硕士论文 2010
[12] 王保丰 计算机视觉工业测量系统的建立与标定 解放军信息工程大学 硕士论文2004
[13]黄达维 基于CMOS图像传感器的采集系统研究 哈尔滨工业大学 硕士论文 2008
[14]康娟 王林 数码相机与胶片分辨率之比较 照相机产品测评 2005(6)34-35