














��ICP��112451047180��-6
������Ľṹ�Լ�����ϵͳ�����
ժҪ�������������ҵ����������,������Ҫ���������������мӹ�������ϴ,�����Ҫ��������з�ת,�Ա��ڽ�һ�����������������Կɱ�̿�����(PLC)Ϊ��������,�о���ҵ������ת�������Ҫ�ķ�����Զ�����ϵͳ���ڸ�ϵͳ��,��ΪROBOT��е�ֱۿ���ϵͳ��ƺ������ת����ϵͳ��ơ�ϵͳ����ǰ,ROBOT��ԭ�㴦�ڵȴ�״̬,�����PORT1�����Ҫ��תʱ��ROBOT���������³���ƽ�ơ���ת��ȡ���������ת��ƽ�ơ���������������ת��ִ�����һ���������ӹ�������з�ת��֮������ROBOT��е�ֱ�ȡ���������������PORT2��,ROBOT�ع�ԭ��,���һ��ѭ������ROBOT���ڵȴ�״̬ʱ,һ���������Ҫ�ӹ�,ROBOT���Զ����빤��״̬��Ϊ��֤��������,��е�ֱ���ϱ�Ƶ�����ö���ٿ���,�н�װ�ò���Һѹ����,������ѹ�����ѹ����������һ��ѹ����Χ�ڶ������,��֤�����á�
�ؼ��֣���ת��PLC��ROBOT����Ƶ����Һѹ
Ŀ¼
��һ�� ���� 1
1.1������Դ���о����� 1
1.2���ĵ���Ҫ���� 2
�ڶ��� ��������Ʒ������ṹ��� 2
2.1��������֤��ѡ�� 2
2.1.1 ����ϵͳ�ķ�����֤ѡ�� 2
2.1.2 ����������֤��ѡ�� 3
2.1.3 �н�װ�õ���֤��ѡ�� 4
2.2 ���������ϵͳ�ṹ��� 4
2.2.1 ����ϵͳ�ṹ��� 4
2.2.2 ROBOT��е�ֱ۽ṹ��� 5
2.2.3 ��ת���ṹ��� 7
������ ���������ϵͳӲ����� 8
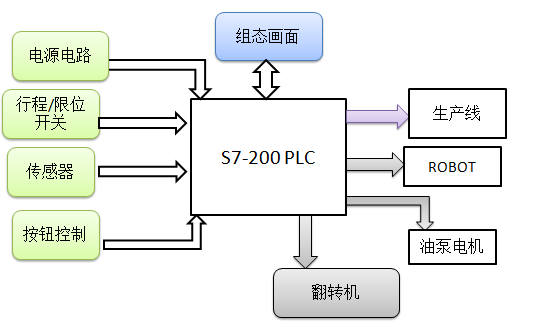
3.1 ������������Ľ��ܣ����֣� 8
3.2 PLC��Ԫ����ѡ�� 10
3.3 I/O�ڷ��� 11
3.4�����Ӳ����·��� 12
������ ���������ϵͳ��������� 15
4.1 ϵͳ��������Ʒ��� 15
4.2 PORT1��PORT2�ij������ 17
4.3 ��е�ֱ�ROBOT�ij������ 18
4.4 ��ת���ij������ 22
������ �˻������������� 25
������ �ܽ�����л 30
����� 31
��һ�� ����
1.1������Դ���о�����
�����������ҵ����������,������Ҫ���������������мӹ�������ϴ,�����Ҫ��������з�ת,�Ա��ڽ�һ�����������������ڹ��ڹ����ܹ������з����������Ʒ�Ĺ�˾������,�������ܺ�Ч����������,������ķ���������������ڡ�����һ��,һ������������Ӫ�Ļ����������Ͼ���Ҫ��Ҫ��ϵ����,���Ѵ�����Ǯ��˵,ά���ڼ�Ҳ����Ӱ���˹����IJ��ܺ�Ч�ʡ����,�ڹ����г����ܹ����������з������,���������г��ռ��,����Ҳ�����˹�����ҵ��Ӫ����,��߹�������Ч�ʡ����,�ڹ����г���,�Է������̽���Լ������кܴ��ʵ�����塣
һ����˵,�������Ҫ���ȡ���,��ת����Լ��Ż�����������̡�Ҳ���ǵ�������Ҫ��תʱ,���ϵ�����Ͽ�,Ȼ��ȡ���ֱ۽���ȡ��,���뷭ת���н��������淭ת,��ת��Ϻ���ȡ�����ϷŻ���һ������������,�����һ������ѭ����
1.2���ĵ���Ҫ����
�ڱ���ϵͳ��,���������Ϊ�����������,һ����ROBOT��е�ֱ۲���,��ִ�����ȡ��,���ϵĹ������ڶ����Ƿ�ת����Ʋ���,����Ҫ��ɶ����ϵķ�ת������
��ϵͳ��һ������������PORT��,�ֱ�Ϊ���Ͽ�,�������ת����;���Ͽ�,�Ż��ѷ�ת�����ϡ���һ���Ƿ�ת��PORT��,���Է�ת��Ҫ��ת�����ϡ����������������м�ΪROBOT���в��֡�Ϊ�˱�֤������ȫ,ROBOT���в���������������,ROBOTҲֻ���ڹ涨�����ڽ�������������ROBOT(��е�ֱ�)��������ʵ�ֵĹ��ܣ�λ�õ�ƽ�ơ�������ת���ֱ��������ֱ۵�̧�����½�������ʹ��������S7-200PLC����г̿���ʵ�ֲַ�����,����Ԥ����ƺõĻ���ʵ��������Ҫ��
�����
[1] ������.�����ɱ�̿���ԭ����Ӧ�ã�S7-200 PLC����M��.���������ӹ�ҵ�����磬2013
[2] ���Ƽ . ������̬������Ӧ�� ��M��.�������������ӿƼ���ѧ������ ��2013
[3] ���괺. ��ҵ���������е�� ��M��. ���������ӹ�ҵ�����磬2015
[4] ���� . ��ҵ���Ӧ���˻�����ѧ ��M��. ������������ѧ���������� ��2013
[5] CAD/CAE�������� .AutoCAD2014���İ������ƣ�M��. �������廪��ѧ�����磬2015
[6] ��������������о���.���������Զ��������ֲ�(��3�棩[M].����:��е��ҵ������,2011
[7] ��ѩ��; ��ʵ. ������Զ�����ϵͳ�������ʵ�֣�J��. ұ����, 2014
[8] ��ѩ��; ����. PLC���Զ����������ϵͳ�е�Ӧ�ã�J��. ���ƹ��̣�2006
[9] ���۳�.���������װ�����ԭ������J��. �����Ʒ�����봴�£�2012
[10] ������ ������ ���꽭. �Զ���⼼����3���M��. ��е��ҵ�����磬2009