


苏ICP备112451047180号-6
一种磁悬浮单轴控制轴流式血泵的设计与实现
摘要
本文介绍了磁悬浮轴流式血泵的设计与实现。转子具有用于流体流动的中空结构,并且所述叶轮被安装在转子的内表面上。磁悬浮系统利用两个被动磁轴承实现径向平衡,利用一个电磁驱动器实现轴向平衡。文章还提出了转子轴向位置控制的传感器组件,该传感器可以准确地测量轴向位移。对于原型泵的建立和研究,实验结果表明可以成功地进行磁悬浮和抽水作业。由于径向运动没有有效控制,在这些方向上存在着明显的振荡,这些振荡主要是由驱动器产生的径向力引起的。
关键词:血泵,电磁驱动器,磁轴承。
目录
摘要 1
1.引言 1
2.原型系统设计 2
2.1电磁驱动器 2
2.2永磁轴承 4
3.转子动力学模型 6
3.1径向动力学 6
3.2轴向动力学 7
4.转子轴向位置传感 7
5.控制系统 8
6.实验结果 9
7.结论 14
附录 14
参考文献 15
1.引言
电机悬浮磁轴承被广泛用于高速应用程序,因为他们仅从摩擦产生损失。应用领域包括工业和医疗系统,例如,真空泵,机床主轴,用于人工心脏和心室辅助设备的血泵。在这些应用中,三个受控制的磁轴承通常用于平衡转子,其中两个用于径向平衡一个用于轴向平衡,同时还需要相关的位移传感器。该设备硬件体积庞大,只适用于空间不受限的应用场合。然而在轴流式血泵中,传统的三轴控制磁轴承在有严格空间限制时是不适用的。在应用中,磁悬浮转子结构紧凑,控制也更为理想。
针对轴流式血泵,提出了多种不同的磁轴承结构。这些设计中的大多数不使用电磁驱动器的所有轴,相反,通常用产生被动力使转子稳定的永磁轴承来降低硬件的空间要求。所有这些设计至少使用两个电磁驱动器来使转子悬浮。最近,有设计提出只使用永磁轴承悬浮转子,然而这样的设计在实践中却很难实现,因为除了叶轮旋转之外该转子还没有有效控制的尺寸。近年来,自轴承技术已应用于轴流式血泵的设计。自轴承控制电机将主动磁轴承功能集成到电机,他们的尺寸比主动磁轴承电机更紧凑,据报道其性能也比得上传统的血泵。典型的自轴承电机有两套定子绕组,一套用于旋转另一套用于暂停。此外,轴流式血泵的转子类似于一列,需要双独立自轴承马达实现驱动。既然四个驱动程序及其相关的控制器已经实现,则需设计出一个更精细的硬件和控制系统。
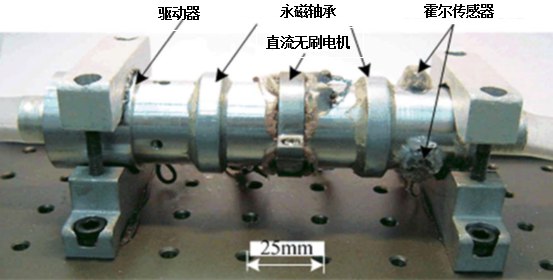
本文介绍了一种使用单轴磁轴承控制系统的轴流式血泵原型的设计与实现。在该设计中,转子悬浮通过在径向方向使用两个被动磁轴承和在轴向方向使用一个电磁驱动器来实现。还提出了一种用于轴向位置传感的传感器组件。该系统设计紧凑,由于只有一个轴主动控制,与利用自轴承或主动磁轴承的系统相比,控制器的执行也相对较为简单。
参考文献
[1] G. Schweitzer, H. Bleuler, and A. Traxler, Active Magnetic Bearings.Zurich, Switzerland: Hochschulverlag AG an der ETH Zurich, 1994.
[2] H. Hoshi, T. Shinshi, and S. Takatani, “Third-generation blood pumpswith mechanical noncontact magnetic bearings,” Artif. Organs, vol. 30,no. 5, pp. 324–338, May 2006.
[3] G. Bramm and D. Olsen, “Magnetically suspended and rotated rotor,”U.S. Patent 5 385 581, Jan. 31, 1995.
[4] J. Fremerey, “Pump with a magnetically supported rotor,” U.S.Patent 6 368 075, Apr. 9, 2002.
[5] J. Antaki, B. Paden, G. Burgreen, and N. Groom, “Blood pump having amagnetically suspended rotor,” U.S. Patent 6 447 266, Sep. 10, 2002.
[6] M. Goldowsky, “Magnetic suspension blood pump,” U.S. Patent6 716 157, Apr. 6, 2003.
[7] C. Huber, P. Tozzi, M. Hurni, and L. Von Segesser, “No drive line, noseal, no bearing and no wear: Magnetics for impeller suspension and flowassessment in a new VAD,” Interact. Cardiovasc. Thorac. Surg.,vol.3,no. 2, pp. 336–340, Jun. 2004.
[8] R. Jarvik, “Axial force null position magnetic bearing and rotary bloodpumps which use them,” U.S. Patent 6 227 820, May 8, 2001.
[9] A. Chiba, T. Fukao, O. Ichikawa, M. Oshima, M. Takemoto, andD. Dorrell, Magnetic Bearings and Bearingless Drives. Amsterdam,The Netherlands: Elsevier, 2005.
[10] T. Tera, Y. Yamauchi, A. Chiba, T. Fukao, and M. Rahman, “Perfor-mances of bearingless and sensorless induction motor drive based onmutual inductances and rotor displacements estimation,” IEEE Trans. Ind.Electron., vol. 53, no. 1, pp. 187–194, Feb. 2006.
[11] A. Chiba, D. Akamatsu, T. Fukao, and M. Azizur Rahman, “An improvedrotor resistance identification method for magnetic field regulation inbearingless induction motor drives,” IEEE Trans. Ind. Electron., vol. 55,no. 2, pp. 852–860, Feb. 2008.
[12] T. Masuzawa, J. Kojima, H. Onuma, Y. Okada, M. Nishida, andT. Yamane, “Micro magnetic bearing for an axial flow artificial heart,”in Proc. 9th Int. Symp. Magn. Bearings, Aug. 2004, pp. 89–95.
[13] J. Delamare, E. Rulliere, and J. Yonnet, “Classification and synthesis ofpermanent magnet bearing configurations,” IEEE Trans. Magn., vol. 31,no. 6, pp. 4190–4192, Nov. 1995.
[14] S. Yang and Y. Chang, “Axial and radial position sensing for a magnet-ically levitated rotor using hall sensors,” in Proc. IEEE IECON, 2007,pp. 2225–2229.