

苏ICP备112451047180号-6
墙追踪机器人的研究与设计
本文论述了基于Arduino的智能墙体追踪的控制过程,智能墙体追踪是基于自动引导机器人系统,用以实现小车自动跟踪,以及选择正确的路线。智能墙体追踪小车是一个运用Arduino、红外传感器、电机驱动及自动控制等技术来实现按照预先设定的模式下,不受人为管理时能够自动实现追踪导航的高新科技。该技术已经应用于无人驾驶机动车,无人工厂,仓库,服务机器人等多种领域。
本设计采用Arduino作为小车的控制核心;采用红外线传感器作为小车的追踪模块来识别小车前方和右方的墙体,采集信号并将信号转换为能被Arduino识别的数字信号;采用驱动芯片L298N构成双H桥直流电机控制,其中软件系统采用C程序,本设计的电路结构简单,容易实现,可靠性高。
关键词:arduino大脑;红外线传感器;自动追踪;驱动电路
墙追踪机器人的设计要求
基于传感器和Adriano的控制技术,设计和实现了一种智能墙追踪机器人解决方案。设计以红外控制模块、Adriano系统模块、电机驱动模块等硬件模块组成的机器人,实现机器人的前进、并能侦测前方或右方的墙体,自动追踪,始终与墙体保持一定的距离。
1.传感器要能够探测道路前方或右方的墙体,给出墙体距离信息;
2.机器人根据传感器给出的信息,决定前进方向;
3.机器人要能够具有与墙体保持一定距离前进、左转弯功能。
1.4墙追踪机器人的总体设计思路
利用红外技术检测墙体物信息,采用Adriano进行实时控制,实现智能追踪,智能小车采前轮驱动,两轮各用一个直流电机控制,后轮是万向轮,起支撑的作用。将二个红外线传感器分别安装在车体的正前方(为A),右侧(为B)。设传感器A.B检测到墙体距离为L,传感器检测到墙体距离小于L时,为低电平;大于L时,为高电平。
1.4.1小车与前方墙体距离足够远
当小车与前方墙体距离足够远时,(A检测不到墙体)。
(1)B检测到墙体时,为低电平,主控芯片控制左轮电机停止右轮转动,车向左方转向。
(2)在(1)状态向左转少许后,B检测不到墙体时,为高电平,主控芯片控制主控芯片控制右轮电机停止左轮转动,车向右方转向。
(3)重复(1)(2)中的动作。
1.4.2小车与前方墙体距离接近
当小车与前方墙体距离接近时(距离小于L)。
(1) A检测到墙体, 主控芯片控制左轮电机停止右轮转动,车向左方转弯,重复1中的(1)(2)。
1.5系统基本组成
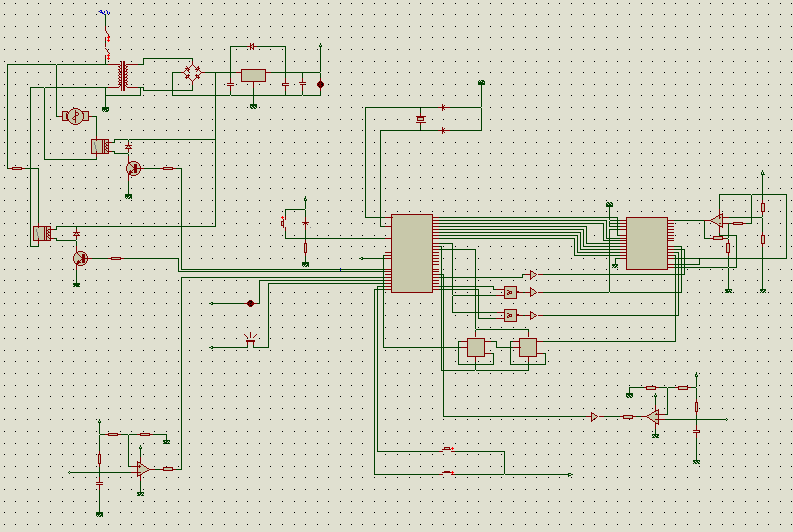
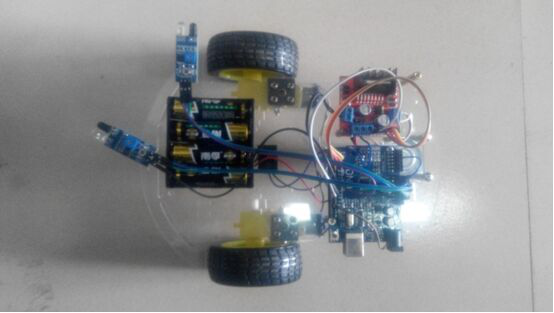
智能墙追踪小车主要由Adriano控制器电路、L298N驱动模块、红外传感器模块、直流电机、电源、小车底板等组成。
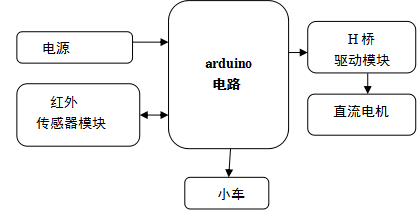
图1.1智能追踪小车控制系统结构框图
结 论
本课题研究的内容主要是智能小车的追踪系统。以实验组装小车为基础,使用了2个红外传感器来探测周围环境,同时对采集到的数据信息进行融合。取得了以下成果:
(1)小车可以实现按照预定的程序在无外部环境影响或改变时,小车将一直沿着墙体走,且遇到前方墙体小车会自动转向。
(2)小车保留了扩展功能。追踪小车在完成设计预想的前提下,主要考虑了车体结构设计的简单化,降低了制作成本,使之更具有普及性。由于设计要求并不复杂,没有在电路中增加冗余的功能,但是保留了各种硬件接口和软件子程序接口,方便以后的扩展和进一步的开发。
智能追踪小车属于应用开发项目,涉及了多种学科,由于本课题的试验性和不完善性。智能追踪小车在以下两个方面还有提升的空间:
(1)环境信息采集功能:环境信息采集的实时性和完整性。
(2)增加循迹控制功能:包括循迹的精确性和灵活度这两个指标。
通过本次设计我掌握了很多以前不熟练的东西,认识了很多以前不熟悉得东西,使我在人生上又进了一步。也认识到很多的不足。本设计不仅对于我了解Arduino的结构、电路设计及控制功能有一定的帮助,还有益于诱发学习Arduino的兴趣。
参考文献
[1] 罗志增,蒋静坪编著.循迹小车感觉与多信息融合[M].北京:机械工业出版社,2003:1-10.
[2] 蔡自兴编著. 中国的智能循迹小车研究[J]. 莆田学院学报, 2002,9 (3):36-39.
[3] 吴林编著. 智能循迹小车主题型号工作的回顾[J]. 循迹小车技术与应用,2001:6-9.
[4] 欧青立,何刻忠等编著.室外智能循迹小车的发展及其关键技术研究[J].循迹小车,2000,22(6):519-526
[5] 杨鹃.多信息融合技术在移动循迹小车避障系统中的应用[D]. 哈尔滨:哈尔滨理工大学.2007.
[6] 恒盛杰资讯编著.Protel电路板设计从入门到精通. 第1版. 中国青年出版社.2006:1-148
[7] 江思敏,陈明编著.Protel电路设计教程. 第1版. 清华大学出版社,2006:1-296
[8] 陈晓莉,张俊涛.KEIL C51单片机仿真器的设计. 第二版. 陕西科技大学出版社,2006:19-20.
[9] 杨素行编著.模拟电子技术基础简明教程.第2版.高等教育出版社,2005:532-547
[10] 余孟尝编著.数字电子技术基础简明教程. 第2版. 高等教育出版社. 1999:1-361
[11] 李全利,迟荣强编著.单片机原理及接口技术.第1版.高等教育出版社,2004:14-191
[12] 孙骏荣 ,吴明展 ,卢聪勇编著.Arduino一试就上手.科学出版社
[13] 程晨编著.Arduino开发实战指南.机械工业出版社.
[14] 于欣龙,张阳,张岩,陈丽译.Arduino机器人权威指南.电子工业出版社.



本文论述了基于Arduino的智能墙体追踪的控制过程,智能墙体追踪是基于自动引导机器人系统,用以实现小车自动跟踪,以及选择正确的路线。智能墙体追踪小车是一个运用Arduino、红外传感器、电机驱动及自动控制等技术来实现按照预先设定的模式下,不受人为管理时能够自动实现追踪导航的高新科技。该技术已经应用于无人驾驶机动车,无人工厂,仓库,服务机器人等多种领域。
本设计采用Arduino作为小车的控制核心;采用红外线传感器作为小车的追踪模块来识别小车前方和右方的墙体,采集信号并将信号转换为能被Arduino识别的数字信号;采用驱动芯片L298N构成双H桥直流电机控制,其中软件系统采用C程序,本设计的电路结构简单,容易实现,可靠性高。
关键词:arduino大脑;红外线传感器;自动追踪;驱动电路
墙追踪机器人的设计要求
基于传感器和Adriano的控制技术,设计和实现了一种智能墙追踪机器人解决方案。设计以红外控制模块、Adriano系统模块、电机驱动模块等硬件模块组成的机器人,实现机器人的前进、并能侦测前方或右方的墙体,自动追踪,始终与墙体保持一定的距离。
1.传感器要能够探测道路前方或右方的墙体,给出墙体距离信息;
2.机器人根据传感器给出的信息,决定前进方向;
3.机器人要能够具有与墙体保持一定距离前进、左转弯功能。
1.4墙追踪机器人的总体设计思路
利用红外技术检测墙体物信息,采用Adriano进行实时控制,实现智能追踪,智能小车采前轮驱动,两轮各用一个直流电机控制,后轮是万向轮,起支撑的作用。将二个红外线传感器分别安装在车体的正前方(为A),右侧(为B)。设传感器A.B检测到墙体距离为L,传感器检测到墙体距离小于L时,为低电平;大于L时,为高电平。
1.4.1小车与前方墙体距离足够远
当小车与前方墙体距离足够远时,(A检测不到墙体)。
(1)B检测到墙体时,为低电平,主控芯片控制左轮电机停止右轮转动,车向左方转向。
(2)在(1)状态向左转少许后,B检测不到墙体时,为高电平,主控芯片控制主控芯片控制右轮电机停止左轮转动,车向右方转向。
(3)重复(1)(2)中的动作。
1.4.2小车与前方墙体距离接近
当小车与前方墙体距离接近时(距离小于L)。
(1) A检测到墙体, 主控芯片控制左轮电机停止右轮转动,车向左方转弯,重复1中的(1)(2)。
1.5系统基本组成
智能墙追踪小车主要由Adriano控制器电路、L298N驱动模块、红外传感器模块、直流电机、电源、小车底板等组成。
图1.1智能追踪小车控制系统结构框图
结 论
本课题研究的内容主要是智能小车的追踪系统。以实验组装小车为基础,使用了2个红外传感器来探测周围环境,同时对采集到的数据信息进行融合。取得了以下成果:
(1)小车可以实现按照预定的程序在无外部环境影响或改变时,小车将一直沿着墙体走,且遇到前方墙体小车会自动转向。
(2)小车保留了扩展功能。追踪小车在完成设计预想的前提下,主要考虑了车体结构设计的简单化,降低了制作成本,使之更具有普及性。由于设计要求并不复杂,没有在电路中增加冗余的功能,但是保留了各种硬件接口和软件子程序接口,方便以后的扩展和进一步的开发。
智能追踪小车属于应用开发项目,涉及了多种学科,由于本课题的试验性和不完善性。智能追踪小车在以下两个方面还有提升的空间:
(1)环境信息采集功能:环境信息采集的实时性和完整性。
(2)增加循迹控制功能:包括循迹的精确性和灵活度这两个指标。
通过本次设计我掌握了很多以前不熟练的东西,认识了很多以前不熟悉得东西,使我在人生上又进了一步。也认识到很多的不足。本设计不仅对于我了解Arduino的结构、电路设计及控制功能有一定的帮助,还有益于诱发学习Arduino的兴趣。
参考文献
[1] 罗志增,蒋静坪编著.循迹小车感觉与多信息融合[M].北京:机械工业出版社,2003:1-10.
[2] 蔡自兴编著. 中国的智能循迹小车研究[J]. 莆田学院学报, 2002,9 (3):36-39.
[3] 吴林编著. 智能循迹小车主题型号工作的回顾[J]. 循迹小车技术与应用,2001:6-9.
[4] 欧青立,何刻忠等编著.室外智能循迹小车的发展及其关键技术研究[J].循迹小车,2000,22(6):519-526
[5] 杨鹃.多信息融合技术在移动循迹小车避障系统中的应用[D]. 哈尔滨:哈尔滨理工大学.2007.
[6] 恒盛杰资讯编著.Protel电路板设计从入门到精通. 第1版. 中国青年出版社.2006:1-148
[7] 江思敏,陈明编著.Protel电路设计教程. 第1版. 清华大学出版社,2006:1-296
[8] 陈晓莉,张俊涛.KEIL C51单片机仿真器的设计. 第二版. 陕西科技大学出版社,2006:19-20.
[9] 杨素行编著.模拟电子技术基础简明教程.第2版.高等教育出版社,2005:532-547
[10] 余孟尝编著.数字电子技术基础简明教程. 第2版. 高等教育出版社. 1999:1-361
[11] 李全利,迟荣强编著.单片机原理及接口技术.第1版.高等教育出版社,2004:14-191
[12] 孙骏荣 ,吴明展 ,卢聪勇编著.Arduino一试就上手.科学出版社
[13] 程晨编著.Arduino开发实战指南.机械工业出版社.
[14] 于欣龙,张阳,张岩,陈丽译.Arduino机器人权威指南.电子工业出版社.
目 录
中文摘要 I
英文摘要 II
前 言 III
1 墙追踪机器人的总体设计 1
1.1智能追踪小车概述 1
1.1.1智能小车的发展历程回顾 1
1.1.2智能小车分类 2
1.2智能追踪小车研究中的关键技术 3
1.3墙追踪机器人的设计要求 4
1.4墙追踪机器人的总体设计思路 4
1.4.1小车与前方墙体距离足够远 4
1.4.2小车与前方墙体距离接近 4
1.5系统基本组成 5
1.5.1Adriano大脑模块 5
1.5.2电机驱动模块选择 6
1.5.3追踪模块的选择 8
1.5.4电机模块的选择 10
1.5.5电源方案选择 11
1.6智能小车底盘 11
1.7智能小车万向轮 12
1.8机械系统 13
2 系统的硬件设计 14
2.1总体设计 14
2.2主板设计框图 14
2.3 arduino的功能特性描述 15
2.4 电机驱动电路 16
2.4.1 L298N引脚结构 16
2.4.2电机驱动原理 17
2.5 红外传感器模块 19
2.6电源电路 20
2.7小车运动逻辑 20
3系统的软件设计 21
3.1系统的软件设计 21
3.2智能墙追踪小车框图 21
3.3编写Arduino程序: 22
3.3.1流程图基本符号 22
3.3.2本系统的编译器 22
3.3.3编写墙追踪小车的程序 25
3.4系统的软件调试 28
3.4.1小车调试 28
3.4.2小车完成追踪情况 28
结 论 29
致 谢 30
参考文献 31
附录A 32
附录B 33
附录C 36