

苏ICP备112451047180号-6
基于三菱FX系列plc机械手的设计
1.结合毕业设计(论文)课题情况,根据所查阅的文献资料,撰写文献综述:
文 献 综 述
简介
在现今的生活上,科技日新月益的进展之下,机械人手臂与有人类的手臂最大区别就在于灵活度与耐力度。也就是机械手的最大优势可以重复的做同一动作在机械正常情况下永远也不会觉得累!可为机械手臂的应用也将会越来越广泛,机械手是近几十年发展起来的一种高科技自动生产设备,作业的准确性和环境中完成作业的能力。工业机械手机器的一个重要分支。
机械手构成
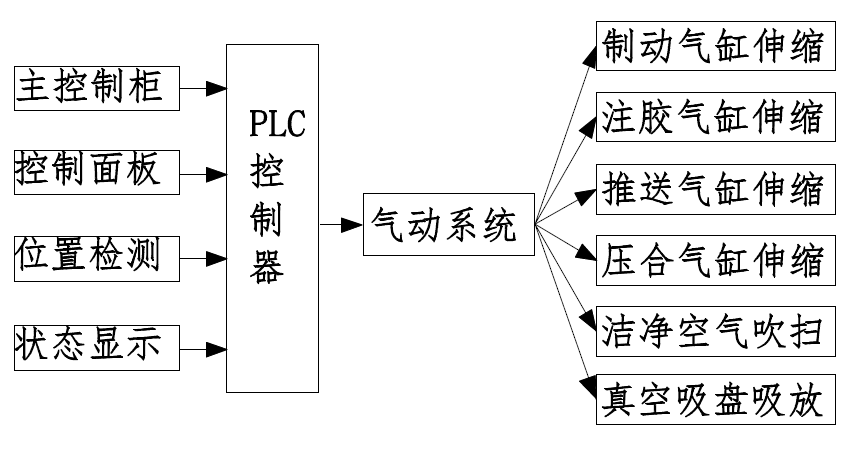
机械手主要由手部、运动机构和控制系统三大部分组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度 。为了抓取空间中任意位置和方位的物体,需有6个自由度。自由度是机 械手设计的关 键参数。自由 度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。一般专用机械手有2~3个自由度。控制系统是通过对机械手每个自由度的电机的控制,来完成特定动作。同时接收传感器反馈的信息,形成稳定的闭环控制。控制系统的核心通常是由单片机或dsp等微控制芯片构成,通过对其编程实现所要功能。
历史
它是在早期出现的古代机器人基础上发展起来的,机械手研究始于20世纪中期,随着计算机和自动化技术的发展,特别是1946年第一台数字电子计算机问世以来,计算机取得了惊人的进步,向高速度、大容量、低价格的方向发展。同时,大批量生产的迫切需求推动了自动化技术的进展,又为机器人的开发奠定了基础。另一方面,核能技术的研究要求某些操作机械代替人处理放射性物质。在这一需求背景下,美国于1947年开发了遥控机械手,1948年又开发了机械式的主从机械手。
机械手首先是从美国开始研制的,1958年美国联合控制公司研制出第一台机械手,它的结构是;机体上安装一个回转臂,顶部装有电磁块的工件抓放机构,控制系统是示教形的,随着计算机和自动控制技术的迅速发展,农业机械将进入高度自动化和智能化时期,机械手机器人的应用可以提高劳动生产率和产品质量,改善劳动条件,解决劳动力不足等问题构成。
分类
机械手的种类,按驱动方式可分为液压式、气动式、电动式、机械式机械手;按适用范围可分为专用机械手和通用机械手两种;按运动轨迹控制方式可分为点位控制和连续轨迹控制机械手等。
机械手通常用作机床或其他机器的附加装置,如在自动机床或自动生产线上装卸和传递工件,在加工中心中更换刀具等,一般没有独立的控制装置。有些操作装置需要由人直接操纵,如用于原子能部门操持危险物品的主从式操作手也常称为机械手。机械手在锻造工业中的应用能进一步发展锻造设备的生产能力,改善热、累等劳动条件。
毕 业 设 计(论 文)开 题 报 告
2.本课题要研究或解决的问题和拟采用的研究手段(途径):
课题研究 基于PLC的控制机械手的设计
研究内容 a 机械手应具有启动/停止、上下左右位置控制、抓取放下物料等功能;
b 要可在电箱上进行位置控制及设置,可进行调试;
c 在电箱上启动后要进行位置及物料检测,保证运行流畅;
d 当机械手出现故障时要停止;
e 要设置启动及急停按钮;
解决问题 a 阅读相关PLC手册,学会如何设置PLC输入输出点;
b 注意各传感器位置;
c 电气原理图制作;
预期目标 实现系统稳定运行,实现运停报警基本功能。
研究步骤 1、了解机械手的运作方式
2 、设计机械手移动和抓放物料的工艺流程
3、清楚机械手的软、硬件组成
4、如何实现电气控制移动和抓放物料
5、PLC系统控制移动和抓放物料过程控制
6、系统对出现的机器故障进行报警
摘 要
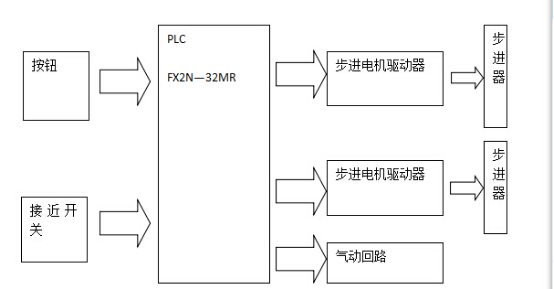
在现代工业自动化领域中,机械手占据了一个很大的地位,其经常作为用户的操纵对象,而从发展的角度来看,虽然机械手进入市场的时间还并不长,但其发展却是十分迅猛。如今,机械手在锻压零件、锻造零件以及装配焊接等多个领域都取得了较快的发展,更多地应用于笨重、温度很高、含有放射性元素等恶劣生产生活环境中。因为机械手有上述所说的优点,因此得到了越来越多开发者和用户的喜爱。现在,企业是否使用机械手已经对企业能否在竞争中表现出优势起到了十分重要的作用,也只有使用机械手,才能彻底改善一线工人的工作条件,减少工人们的劳动强度。在本次研究设计中所设计的机械手当用于搬运装配线的内容进行分配,通过三菱fx系列PLC作为机械手的控制部件,从而完成将物体从A传送带传送至B传送带,从而为物件的下一道工序奠定基础,机械手在上升或者左右旋转时要采用双线圈二位电磁阀来进行控制。文章在机械系统中如何选取硬件,如何设计软件以及如何完成PLC控制装置设计等内容,从而完整描述了整个PLC控制机械手的工作过程。
关键词: 可编程控制器(PLC);机械手
目录
摘 要 1
1 课题研究背景及意义 5
2 机械手方案设计 5
2.1 总体设计要求 5
2.2 PLC选型 7
2.2.1 PLC概述 7
2.2.2 PLC的主要特点 7
1、抗干扰能力强,可靠性高 7
2、PLC具有简单的控制系统,通用性高。 7
3、易于编程,使用便捷 8
4、利用PLC变成能够实现的功能较为完善 8
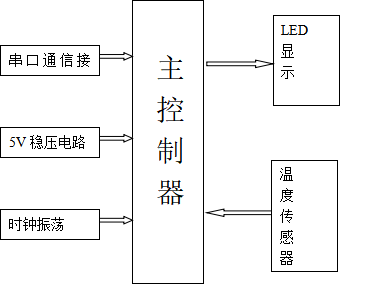
2.2.3 PLC的组成 8
第一部分:CPU模块 9
第二部分:输入/输出模块 9
第三部分: 编程器 9
第四部分:电源 10
2.2.4 PLC型号 10
2.3 三菱FX系列的结构功能 10
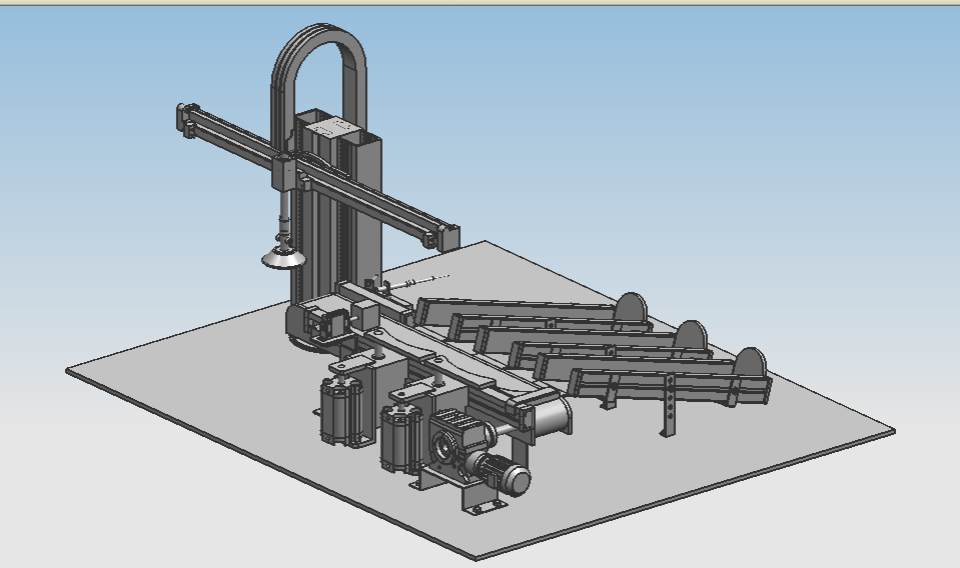
2.4 机械手概述 12
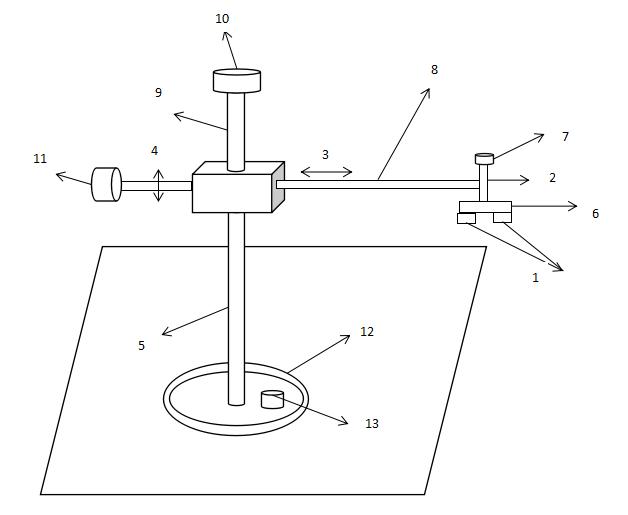
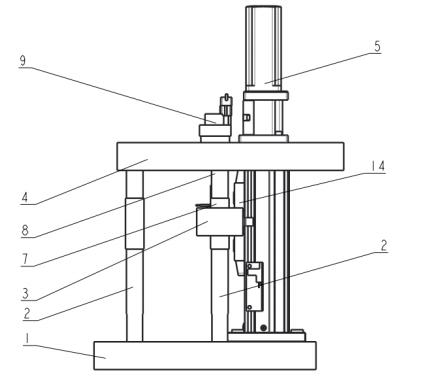
2.5 机械手模型的机能和结构 13
2.5.1 夹紧机构 14
2.5.2 躯干 14
2.5.3 旋转编码盘 15
2.5.4 电源与传动整体 16
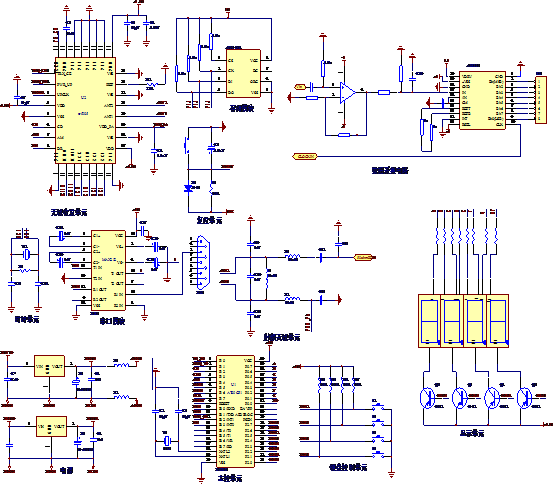
3 控制系统硬件设计 16
3.1 PLC梯形图中的编程元件 17
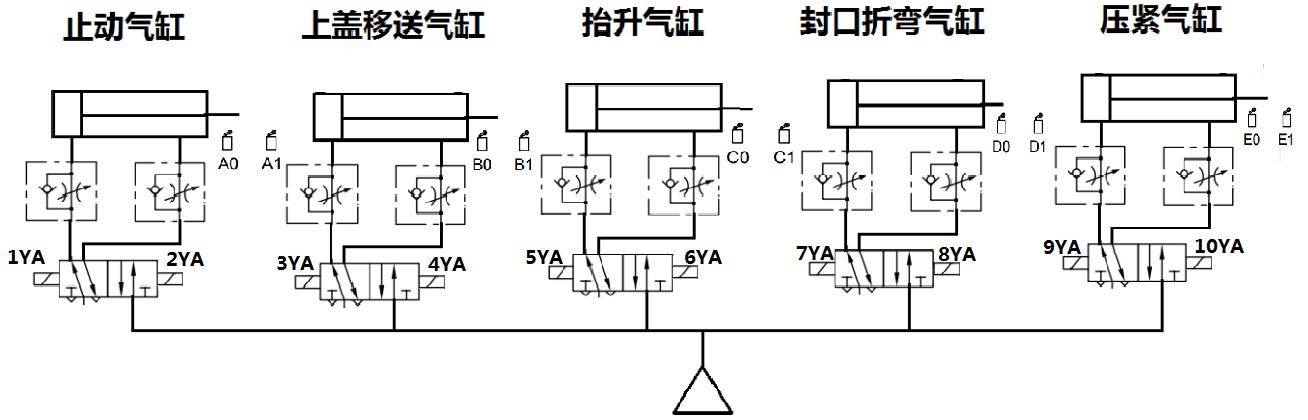
3.2 PLC的I/O分配 17
3.3 机械手控制系统的外部接线 18
4 控制系统软件设计 19
4.1 公用程序 20
4.2 自动操作程序 21
4.3 手动单步操作程序 22
4.4 回原位程序 22
5 系统程序调试 22
5.1 控制系统的程序调试步骤 22
5.2 调试过程中注意的事项 23
6 结语 23
致谢 24
参 考 文 献 25
参 考 文 献
[1] 吴明亮,蔡夕忠.可编程控制实训教材[M].北京:化学工业出版社,2005.8
[2] 张桂香.机电类专业毕业设计指南[J].北京:机械工业出版社,2005.1
[3] 瞿大中. 可编程控制与实验[P].华中科技大学出版社,2002.12.
[4] 殷建国.工厂电气控制技术[M].北京:经济管理出版社,2006.9.
[5] 齐占庆.机床电气控制技术[G].北京:机械工业出版社,2006.1.
[6] 余雷声. 电器控制与PLC应用[M]. 北京:机械工业出版社,1996:58-63
[7] 程周. 可编程控制器技术与应用[M]. 北京:电子工业出版社,2002.8:99-102
[8] 郁汉琪,郭健. 可编程序控制器原理及应用[M]. 北京:中国电力出版社,2004:88-90
[9] 黄净. 电气及PLC控制技术[M]. 北京:机械工业出版社:72
[10] PLC与自动控制系统[M].Berlin:The Modern Machinery Weekly.2008:49-61
[11] 王孙.关节式机械手本体及控制系统设计[M].西安交大机械电子工程研究所,CN 44-1259/TH.
[12] 高钦和. 可编程控制器应用技术与设计实例[M]. 北京:人民邮电出版社,2004.7:7-10
[13] 机电一体化技术手册编委会.机电一体化技术手册[J].北京:1999.7.第二版
[14] 三菱集团.三菱FX2N系列可编程控制器使用手册[J].北京:1997.12
[15] 张万忠,孙晋. 可编程控制器入门与应用实例(三菱FX2N系列)[M]. 北京:中国电力出版社,2005:86-98