


苏ICP备112451047180号-6
一种带避障功能的智能巡检小车开发设计
摘要 随着物联网这一新兴行业的发展,人们的生活更加智能化。其中在安防巡检等领域,智能巡检小车以其安全可靠、持续工作、操作方便、智能化等特点,占有重要地位。能够在地形狭窄或存在安全隐患的地方,进行巡逻勘察。
本文首先阐述课题的研究背景与意义,同时分析国内外的研究现状。接着系统地讲解智能巡检小车所采用的技术与原理,包括其中的硬件设计和软件设计。最后,对本系统进一步总结。
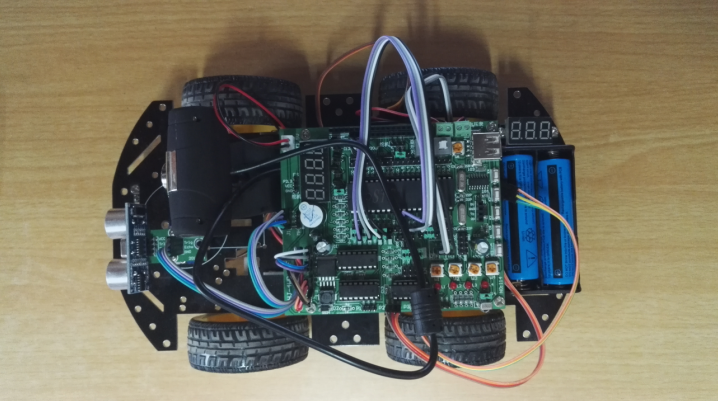
本智能巡检小车系统,使用STC89C52为控制核心。利用舵机搭载超声波传感器进行180度旋转,检测前方及左右两边到障碍物的距离,并显示在数码管上,实现避障;利用红外线传感器检测地面路径,实现循迹;利用WIFI模块,用户可在手机客户端观察摄像头所拍摄的小车前方视频,并可手动遥控小车的前进方向,实现远程监控。单片机接收各传感器所传信息,分析判断,进而根据控制程序,传输指令给电机驱动,控制小车的运动方向。本系统可设置最小安全距离,可利用脉宽调制设置小车前进速度。
综上所述,该智能巡检小车功能齐全,安全高效。
关键词: 智能巡检小车 避障 循迹 远程监控
目录
第一章 绪论 1
1.1 项目的背景和意义 1
1.2 研究开发现状分析 1
1.3 项目的目标和研究内容 3
第二章 系统总体方案设计 4
2.1 系统要求 4
2.2 方案设计与论证 4
2.2.1 智能小车载体选择 4
2.2.2 主控制器选择 5
2.2.3 传感器选择 5
2.2.4 电机驱动选择 6
2.2.5 舵机驱动选择 6
2.2.6 稳压电源选择 6
2.2.7 摄像头选择 7
2.2.8 无线传感技术选择 7
2.2.9 智能小车最终方案 8
2.3 系统总体设计 9
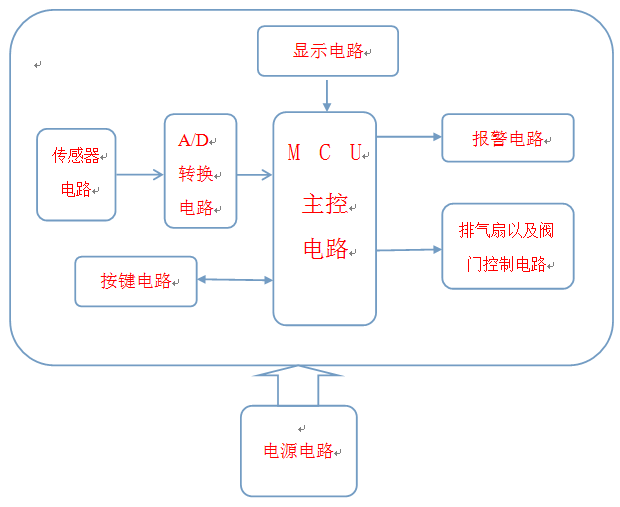
2.3.1 系统组成 9
2.3.2 系统工作原理 9
2.4 本章小结 10
第三章 系统硬件设计 11
3.1 主控制器模块设计 11
3.1.1 STC89C52单片机硬件结构简介 11
3.1.2 最小系统应用设计 13
3.2 电机驱动模块设计 14
3.2.1 L293D电机驱动原理 14
3.2.1 直流电机调速原理 16
3.3 避障模块设计 17
3.3.1 超声波测距原理 17
3.3.2 舵机转向原理 18
3.4 循迹模块设计 19
3.5 数码管显示模块设计 22
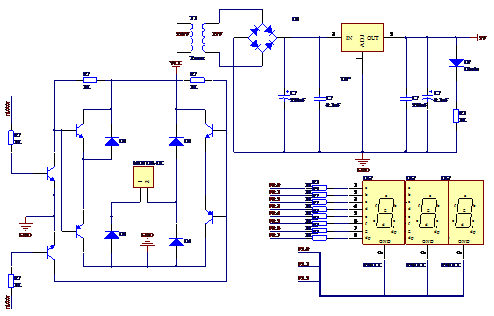
3.6 稳压电源模块设计 23
3.7 WIFI模块设计 23
3.8 系统整体电路设计 24
3.9 本章小结 25
第四章 系统软件设计 26
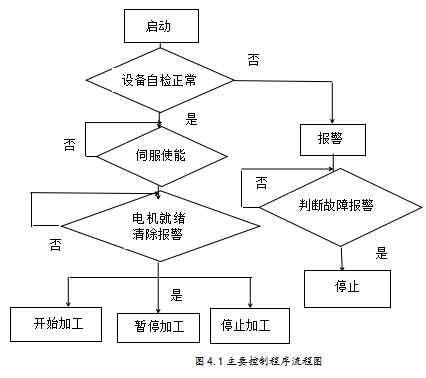
4.1 主程序 26
4.1.1 程序设计 26
4.1.2 主程序 26
4.2 电机驱动程序 27
4.2.1 电机驱动算法 27
4.2.2 PWM调速算法 28
4.3 数码管显示程序 28
4.4 避障程序 29
4.4.1 初始化程序 29
4.4.2 超声波测距算法 29
4.4.3 舵机转向算法 30
4.4.4 小车避障算法 31
4.5 循迹程序 32
4.5.1 初始化程序 32
4.5.2 红外检测算法 32
4.5.3 小车循迹算法 33
4.6 串口通信程序 33
4.6.1 初始化程序 33
4.6.2 小车控制算法 34
4.7 无线通信程序 34
4.8 Android客户端 36
4.9 本章小结 39
第五章 系统的安装与调试 40
5.1 安装步骤 40
5.2 系统调试 40
5.2.1 电机驱动模块调试 41
5.2.2 超声波避障模块调试 41
5.2.3 红外循迹模块调试 42
5.2.4 客户端控制模块调试 43
5.2.5 联合调试 45
5.3 本章小结 45
结 论 46
致 谢 47
参考文献 48
第一章 绪论
1.1 项目的背景和意义
自工业革命以来,人们为了减轻劳动强度,提高生产效率,改变生产方式,开始致力于对机器人领域的研究。经过近一个世纪的发展,在工业生产、军事国防、科学探索等方面,取得了非常大的进展。由于机器人的智能程度逐渐提高,人们的生活质量不断改善,生产效率不断提升。正逐步地将人从环境恶劣、任务繁重的工作中解放出来。
其中,机器人研发的一个重要方向便是移动式机器人,尤其是拥有一定人工智能。在科学探索、安防巡检和紧急搜救等状况下,会存在一些地形狭隘或存在安全隐患等人类无法触及的地方,这就需要移动式机器人来完成勘察。而自主避障、路径规划、远程监控这些功能是移动式机器人必须拥有的基础功能。其中,避障功能系统是移动式机器人的一项非常关键的技术,也是主要的研发方向。
在全球经济多元化的环境下,许多地域的研发部门投入大量的资金用于机器人领域的研究。由于计算机技术、通信技术和传感器技术等技术的共同发展下,移动式机器人的智能化程度逐渐提高,可以通过实时采集周围环境信息,自主推理判断,并做出相应的反应,规定小车的行动路线,达到避障或循迹等目的。
移动式机器人领域的研发,对于现代社会的发展,能做出巨大的贡献。在工业生产方面,可以帮助工人劳作,提升生产率,节约生产开成本。在科学探索方面,可以代替人类探索充满危险的未知领域,通过自身携带的各种传感器,收集准确的环境信息。
1.2 研究开发现状分析
从提出机器人研发工程以来,到现今,已经过三代。
第一代机器人是简单的示教再现型机器人[1],使用者预先设置机器人的标准动作和运动路线,机器人再不断地重复做出这些动作。当前,许多产业自动流水线上经常采用这一类机器人,帮助生产。
第二代机器人是感觉机器人[2],拥有初级的感知能力,能收集周围环境数据,通过分析推理,做出应有的动作调整。自上世纪末,在部分公司企业的车间里逐年增加。
第三代机器人是高级智能的机器人[2],具有功能强大的环境感知能力和自适应能力,能充分收集复杂的工作环境和操作对象的信息,还能自主判断分析,自主规划决策,给出可靠的动作指令。由于智能化程度高,目前还在研发阶段。
国外概况:
自20世纪50年代,许多国家便开始了对能够采集周围环境信息,自主分析判断,控制行为动作等功能的智能移动式机器人研发。美国斯坦福研究所率先研发出Shakeyde移动机器人,具有一定程度的智能,拉起了全球范围研发热潮的开端。虽然起初的研究结果不及期望,但经过几十年的努力,积累了大量的经验,夯实了牢固的基础。目前,移动机器人在众多应用领域,都得到了相当不错的进展。
美国卡内基·梅隆大学曾研发出“丹帝Ⅱ”,这是一款八条腿的蜘蛛型机器人,曾被应用于火山口的探险活动,采集现场底部的环境数据,并拍摄高清图片。美国航空航天局曾制造一款机器人索洁娜[3],登陆火星进行探险,并在采集了许多火星上的信息数据。
国内概况:
我国在移动机器人领域,同其他研发较早的国家相比,历时短,基础薄。总体上落后,技术上存在一定差距,但研究速度很快。80年代末,我国高科技研发计划,把智能机器人作为一项非常重要的研发项目。经过多年的持续研究,取得了显著成效,在局部领域甚至接近世界领先水平。
国家科学院研制出能够多方位采集信息、具有视觉导航系统的智能移动式机器人[4]。香港城市大学的多个研发机构,通力合作,开发出能够主动为车辆提供行驶路线及其他功能的机器人。
综上所述,智能移动式机器人的研究已经取得了相当不错的成果,但远未达到预期高度智能化的目标,无法广泛应用于实际生活生产。
1.3 项目的目标和研究内容
论文目标是设计一种带避障功能的智能巡检小车,该小车可以通过传感器来感知外部环境,测得周围障碍物的距离,实施避障。检测地面黑线路径,实施循迹。
用户可以使用手机客户端观察智能小车前方环境画面,并可以手动遥控智能小车的前进方向,实施远程监控。
本课题的主要研究内容是采用STC89C52单片机设计一个简单的智能巡检小车的运动控制系统、感知系统、监控系统,并从硬件、软件上予以实现。
本课题的研究主要内容:
1.根据系统要求,进行整体框架设计,最终确定系统的设计方案。
2.硬件设计,主要根据其所需实现的功能,选择关键模块,并对各模块的型号进行筛选,构成硬件电路。
3.软件设计,主要研究车超声波测距算法,舵机控制算法,红外检测算法、电机控制算法和串行口通信算法并在Keil环境下用C语言进行算法编译。
4.编写应用于Android系统的手机客户端,可在WIFI环境下接收USB摄像头视频,并可遥控智能小车。
5.模拟一些室内环境,测试小车的自动避障、路径规划和远程监控等功能,调试电机和舵机的一些控制参数,进一步提升小车的性能。
参考文献:
[1]崔一鸣.多机器人协作的关键技术研究[D].南京理工大学,2008
[2]李忠智.经典倒立摆模型在双足步行机器人系统中的应用[D].西南大学,2009
[3]宁姗.基于多传感器的机器人环境感知方法研究[D].哈尔滨工程大学,2007
[4]王晓.轮式移动机器人运动控制的研究[D].广东工业大学,2010
[5]黄忠富.随钻电阻率测井仪器的实现[D].华中科技大学,2002
[6]滕秋菊.基于超声探测的飞机地面牵引移动防撞技术研究[D].南京航空航天大学,2007
[7]苏倩.基于ZigBee的多智能机器人无线通信系统的硬件平台研究[D].西安电子科技大学,2012
[8]李书婷.基于单片机的声控报警器设计[J].商洛学院学报,2015,29(4):11-14
[9]周建华.单片微型计算机外设模块设计技术研究[D].江南大学,2008
[10]王国军.超声波测距传感器的研究[D].黑龙江大学,2014
[11]彭贤武.基于CAN总线的汽车侧向防撞预警系统开发研究[D].长安大学,2007
[12]冯乐涵.移动机器人运动目标检测与跟踪系统研究[D].河北工业大学,2010
[13]潘逢群.基于LabVIEW的工业控制实验教学系统研究与开发[D].陕西科技大学,2012
[14]S. Zhang and MA Karim, A new impulse detector for switching median filters, IEEESignal Processing Letters, 2002, 9(11): 360-363
[15]Moghaddam M E, Jamzad M. Finding point spread function of motion blur using Radon transform and modeling the motion length. Proceedings of the Fourth IEEE International Symposium on Signal Processing and Information Technology [C]. Rome, Italy:IEEE,2004:314-317
[16]M. Sonka, V. Hlavac, R. Boyle. Image Processing, Analysis and Machine Vision, Second edition. Thomson Asia Pte Ltd, United States of America, 1998
[17]T.Chen and H.Wu, Adaptive impulse detection using center-weighted median filters, Signal Processing Letters, 2001, 8(1): 1-3