


苏ICP备112451047180号-6
基于PLC控制的冲压机器人(机械手)系统设计
摘要:模具生产用的机器人式手臂是模仿人类的手部功能,根据适当的功能指令、指定的轨迹和要求实现主动取放、搬运和操作等的自动装配,是模具生产制造的自动化程度、机械化程度的重要设备其中之一。机器人式的手臂在自动化生产车间当中被用来转运货物,从事喷涂、装配、焊接、等操作,可以将人工从繁重的体力劳动工作中解脱出来。尤其是在高温、高危的作业环境中,例如有毒气体、放射性、粉尘、易燃易爆。可以用机器人替代人工的操作部分。当前机器人已近较为广泛地应用于冲压、铸造、锻造、数控加工、装配等多种工作过程当中。本篇文章是将PLC应用在对一种由电动机和液压构成的工业用机器人的结构中进行分析,并完成系统的主、控制电路的设计,绘制出机械手结构示意图、工作流程图,编制出梯形图,并选择了相应的技术参数。
关键词:工业机械手;PLC控制;主电路;控制电路;梯形图
目录
一、序 言 4
1.1概述 4
1.2 选题意义 5
1.3 国内外发展趋势 6
二、 软 件 应 用 8
2.1 掌握PLC仿真软件 8
2.2 掌握编程软件 8
2.3 掌握西门子S7-200系列PLC 9
三、软 件 设 计 10
3.1 驱动系统选择 10
3.2 分配输入、输出设备 11
3.3 PLC的扫描运行方式 12
四、机 械 手 设 计 13
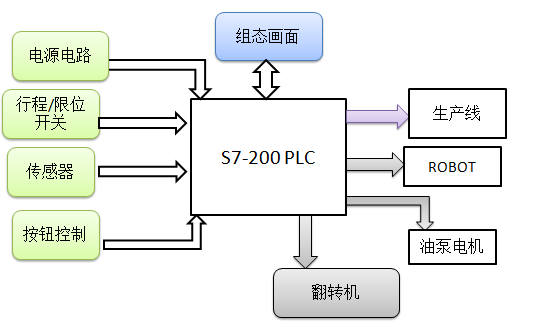
4.1 接线图设计 13
4.2 PLC 流 程 图 设 计 14
4.3 梯形图设计 16
五、小 结 19
致谢 20
参考文献: 21
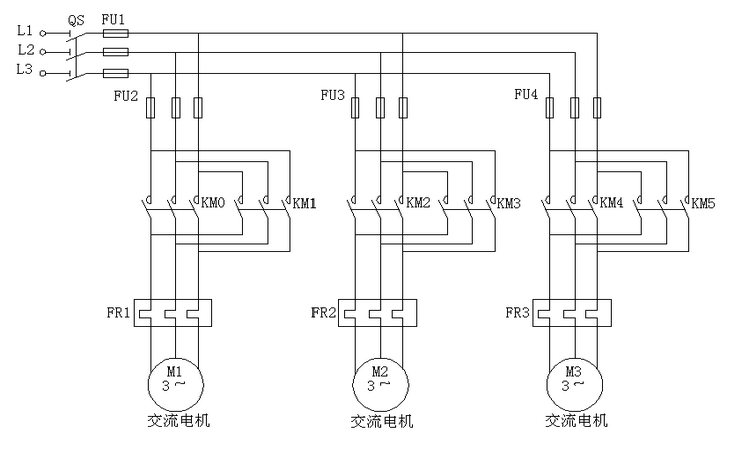
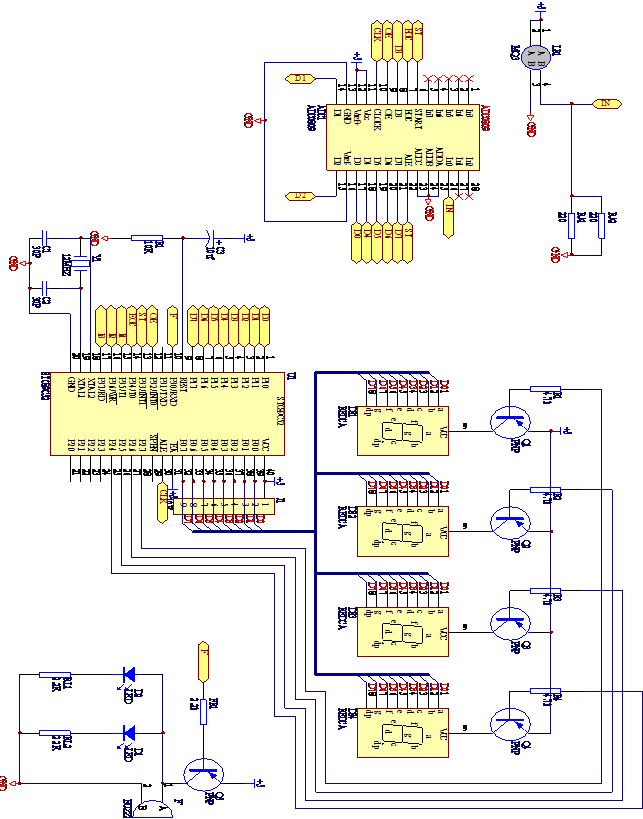
附录一 系统主电路图 22
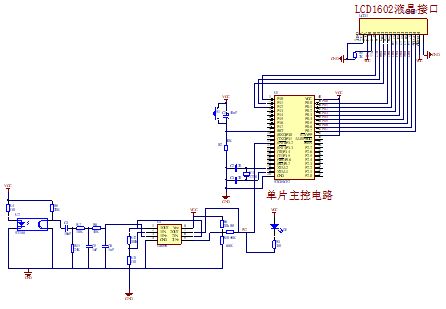
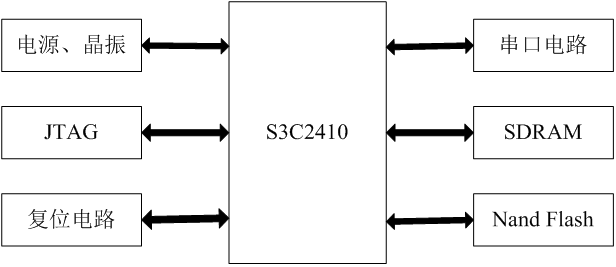
附录二 PLC结构图 22
附录三 PLC外部接线图 23
附录四 PLC流程图 23
附录五 PLC控制梯形图 25
一、序 言
1.1概述
搬运用机器式手臂装置是被用来代替人工来实现模具生产制造自动化的机器装置,机器人式手臂可以效仿人类的一些手部抓取搬运动作,根据输入的规定程序功能指令和运行的路径等指令来达到能够完成模仿人工抓取与搬运的动作指令要求。
在近几年的模具生产制造业中,搬运机器人式手臂是刚刚出现的一种新的科技,并且快速的发展成为了模具生产制造产业中的重要设备。搬运机器人式手臂已经渐渐的成为了一项崭新的技术。与机器式手臂原理所有关的内容包括机械制造、力学、电子器械的液压技术、自动化控制技术、感应传感器技术与计算机计算技术等,冲压用机械式手臂工程可以说是一门融合了多门学科的综合技术。
在铸造、模型冲压、材料锻造、结构焊接、设备装配、模具的机械处理加工、设备外部喷涂、材料的热处理等各大行业当中机器式手臂都被很大程度的应用在生产与工作中。用机器式手臂来代替人工来进行工作更加能够体现出其所具备的优越性。搬运用机械式手臂是能够提升生产工作劳动效率、有助于工作环境改变、减低人工工作强度和达到自动化生产的重要方式方法之一。
PLC——可编程控制器是特地为了在模具生产加工的工作环境下被设计出来的用于实际的制造加工中的装置。PLC的进步与发展也跟着微型电子、自动化控制与通讯系统的大力发展而发展,也渐渐的成为了一些中大型制造加工企业的标准设备。
因为可编程控制器与其他的程序控制方式相比较而言有着特别的优点,比如其有着较高的普遍性,通用性高,更加实用可靠,控制器软件与硬件设施较整齐,上手容易,与此同时,自动化的制造生产可以很大的程度上减少了人力资源的使用与物力资源的浪费,所以可编程控制器在中大型模具制造加工企业当中有着较为宽阔的市场与前景。
类似于机器式手臂的机器人在国外也有着较广泛的使用率,比如农场的农作物采摘、模具设备的装配与调试。当前由于国内的模具制造企业的自动化生产程度还并不是很高,所以可编程控制器在国内模具制造加工产业的发展还只是刚刚起步,通过学习与查阅多多了解机器式手臂的世界水平,尽可能多的在平时生产与加工中实践与应用起来。
1.2 选题意义
在当今的模具制造加工企业当中,机器式手臂有着较高的欢迎程度,在日常的模具加工的过程当中通过使用机器式手臂可以较大程度上降低模具制造加工企业对用工量的需求,从而能够达到降低企业生产制造加工的成本的目的。从而可以达到循环发展的目的。搬运机器式手臂的出现在很多的方面都大大的减少了中大型模具制造企业的生产成本,与此同时也在某一种程度上大幅度的提高了企业的产能产量与产品的质量,在目前的机器人行业当中机器式手臂的发展在这几十年当中是十分迅速的,其属于新颖的高科技含量的自动化模具制造生产技术设备。
自从90年之后,响应政府的“863”规划,机械生产用的机器人已近火速的成长为一项重要的科学技术并得到了十分快速的成长、研究与制造。机器式手臂作为制造产业机器人当中的一个特殊的分支具有十分美好的成长机会。机器式手臂的存在十分有效的推进了模具制造生产业的成长,在现实的用途和机械程度较高、自动程度较高的地方都有着不错的表现,并且在模具制造生产行业当中被相当大范围的应用在生产流水线上。在通过对可编程控制器的精确掌控来实现机器式手臂的技术进行模具的制造加工生产,能够在非常大的程度上提高生产的产能与生产质量,同时也大大降低了企业的用工成本。根据机器式手臂拥有多样化的驱动方法,大致可分为利用液压驱动的、利用气动驱动的、利用电器驱动的还有单纯只靠机械零件传动驱动的。
根据当前的模具制造生产企业的选用程度来讲,利用液压驱动的与利用气动驱动的机器式手臂能够得到更多的中大型模具制造加工生产企业的所认可,这两种驱动方式所展现出来的巨大优势,包括其单一易懂的结构支架,在使用方面容易学习,再有就是这两类的机器式手臂的本身重量较轻、在运行的过程中各种动作敏捷、执行动作指令时运动平稳、本体结构可靠结实节约能源。
除了这些优点之外这两类的机器式手臂还比较简单的就可以达到无极变速、过载后的断电保护和实现较复杂多部位联动的动作特点。所以利用液压驱动的与利用气压驱动的机器式手臂在模具制造加工生产行业、半导体和家用电器生产的企业、食药品的外包企业、精度较高的的仪器制造生产企业、军工企业当中都有着较大程度的使用。
机器式手臂在外国成长方向是偏向于探究具备某一种特殊智能的机器式手臂,使机器式手臂在实际的工作环境中具备一定的感应感知能力,能达到实时的将外部环境的变化及时的反馈可控制系统,从而及时的做出相应的判断与修正动作。比如在实际的生产过程当中机器式手臂的位置相对于标准位置来说发生了位移偏差时,机器式手臂的系统能够自动的检查到错位的发生然后能够快速的进行修正。
在国外机器式手臂的研发重点是研究具有触觉和视觉的机器式手臂,到目前位置已经获得了一些成功与一些成绩。跟随者模具制造生产加工企业的发展与成长机器式手臂的研发制造生产与被选用也跟随的一并在慢慢扩大范围,在国际上也有着特别激烈的学术讨论,机器式手臂在当前世界高层次的制造加工生产行业具备着精度高,速度快,轴向选择多和轻便的成长发展方向,在另一方面,由于迷你型和微型的机器式手臂的存在,机器式手臂也将会带动其他使用其的行业摆脱掉传统的机械时代,向着电子信息、生物生命科学和高科技技术层次高端的产业发展。
单单从进几年出现的机器式手臂的种类看来,模具制造加工行业的机器式手臂正在朝着智能化的方向大步的前进,它的成长方向主要还是机器式手臂结构的整体模块化和可重构化,操作控制程序的开放,终端控制机的互联网化,伺服驱动程序的分散和数字化,实际的生产加工工作环境的改进改善,包括整个机器式手臂程序的更加智能化。
1.3 国内外发展趋势
从60年机器式手臂的出现之后,在经历的近半个世纪的成长,目前已经发展成为了模具制造加工产业的不可或缺的设备之一。当前在我国正真投入工厂进行生产使用的机器式手臂绝大多数都还只是初代的机器式手臂,也就是单单依靠着输入的程序来进行控制操作的机器式手臂。
在初代的机器式手臂上还绝大多数都是使用的点为控制的方式,不具备能够感应外部工作环境工作条件的感应器,这一代机器式手臂绝大多数都只是被应用在较单一简单的工作环节当中,比如产品的焊接,生产过程中的上下物料以及产品的喷涂。第二代的机器式手臂在建立于初代机器式手臂的基础上对其进行了改造升级,增加了具备感应功能的感应器,但其还是依靠输入的程序来进行控制,但其在初代机器式手臂的基础上可以根据机器式手臂工作时外部的环境条件的变化的信息进行对原本的输入程序的校对。
在第二代的机器式手臂上大多数都是运用了接触式的感应器的一种较为简单的传感方式和要求对应的程序算法。当前第三代的机器式手臂正在根据第二代与初代的机器式手臂的实际运用的案例成果当中快速的成长起来,第三代的机器式手臂不单单是只能感应到外部工作环境的变化,并同时能够对一些较为困难的感应信息进行准确的计算与处理,使其成为能够根据实际的操作工作环境中的某种特殊变化主动地对自身做出相应的改善决策能力的高智能化机器式手臂。
相比较于前两代的机器式手臂,第三代的机器式手臂能够识别出来感应器前的景物,具备有类似于人的触觉,视力和听觉等多种感官功能,使其能够实现对生产的产品的搜索、跟踪、辨别的多种动作要求,具备有独立的处理能力,语音识别的功能和自动学习的高智能选项。
机器式手臂的功能技术在目前掌握的基础之上又有了新的发现与发展,出现了以人手为模板的高仿型机器式手臂、微型机器式手臂以及其更急简单易懂的操作程序、智能化的机器式手臂。当前的形式是机器式手臂正在向着除了模具制造加工产业之外的行业快速的扩展着,与此同时飞速发展的机器式手臂务必会被大量的用于到军事力量当中。
在国门之外:最近几年的模具制造加工产业的机器式手臂具备着以下的几个发展方向,机器式手臂的自身性能在不断的变好,与此同时单片机的价格却处于不断下降的阶段,机器式手臂的主体机械结构也从以前的多元化转变为现在的模块化与可重构化,控制程序正在向着基于终端机开放型的控制器件的目标前进,在机械式的手臂中传感器的作用得以彰显,虚拟化现实化的技术在机器式手臂的控制程序当中已经从单纯的模仿发展成了过程的掌控。
在我们国家:根据当前的一些机器式手臂的类别方面,例如加工焊接用的机器式手臂、产品喷涂用的机器式手臂、物料的搬运用的机器式手臂、产品的装配用的机器式手臂和特种作业用的机器式手臂都是在根据机器式手臂的操作机的制造技术,解决了机器式手臂的驱动程序和设计装配等较核心的技术,与此同时还了解了产品喷涂、生产焊接、产品装配的整体自动通信与控制技能,在其基本的电子元件上,谐波减速器、机器式手臂的焊机电源、焊接路径的自寻装置也取得了叫成功的突破。单从技术水平的层次来说,我国已经能够有技术条件进行机器式手臂独立自主的研发水准。
参考文献:
[1] 廖常初.可编程序控制器应用技术(第四版)[M].重庆:重庆大学出版社,2005
[2] 许志军.工业控制组态软件及应用[M].北京:机械工业出版社.2005
[3] 王承义.机械手及其应用[M].北京:机械工业出版社,1981
[4] 白传悦.装配机械手PLC控制系统[J].可编程控制器与工厂自动化,2006,6(5):134~136
[5] Saeed B.Niku,Introduction to Robotics: Analysis, Systems, Application[M].USA: Pearson Education, 2001
[6] 陈恳,杨向东,刘莉,杨东超.机器人技术与应用[M].北京:清华大学出版社,2006
[7] 吴建强.可编程控制器原理及其应用[M].哈尔滨:哈尔滨工业大学出版社,1998
[8] 林小峰.可编程序控制器及应用[M].北京:高等教育出版社,1991
[9] 王永华.现代电气及可编程序控制器技术[M].北京:航空航天大学出版社,2003
[10] MITSUBISHI PROGRAMMABLE CONTROLLER MELSEC F1 SERIES ProgrammingManuo Mitsubishi Electric COR[J].1999,2(6):101~120
[11]郭洪红.工业机器人技术.西安:西安电子科技大学出版社,2006年,20-28
[12]王承义.机械手及其应用.北京:机械工业出版社,1981,8-25
[13]张凤珊.电器控制及可编程序控制器.北京:中国轻工业出版社.1999,62-79
[14]杨长能,张兴毅.可编程序控制器基础及应用.重庆:重庆大学出版社.1992,31-52
[15]袁秀英.组态软件技术.北京:电子工业出版社.2003,6-37,154-159
[16]北京昆仑通态自动化软件科技有限公司.MCGS用户指南.
[17] 吴明亮,蔡夕忠.可编程控制实训教材[M].北京:化学工业出版社,2005.8
[18] 张桂香.机电类专业毕业设计指南[J].北京:机械工业出版社,2015.1
[19] 瞿大中. 可编程控制与实验[P].华中科技大学出版社,2002.12.
[20] 殷建国.工厂电气控制技术[M].北京:经济管理出版社,2006.9.