


苏ICP备112451047180号-6
基于Arduino的超声波避障小车设计

1 引言
1.1 概述:
本文主要介绍用Arduino软件编程来控制小车的避障。超声波探头测得的距离将呈现在1602显示屏上面,并根据距离来判断是否需要躲避。
1.2 原理:
经过焊接、组装、调试等工作后智能小车成形。并且借助超声波探头以及Arduino软件编程设计制作了一个超声波避障小车。设计编程简单,容易理解掌握,且工作稳定可靠。总体电路简单,易于制作。本次设计通过超声波探头来测得距离、Arduino软件编程获取的程序来控制小车的避障功能。程序表现为:当超声波探头测得的距离大于60cm(数值可自己选定)时,小车保持当前的状态(前进),当超声波探头测得的距离小于60cm时,小车车体的左轮继续运转,右轮停止运动,因此小车向右行驶,直到前方60cm不再有障碍物时继续前进。
目 录
1 引言 3
1.1 概述 3
1.2 原理: 3
2 设计内容及设计要求: 3
3 试验器件清单: 3
4 设计的系统方案: 4
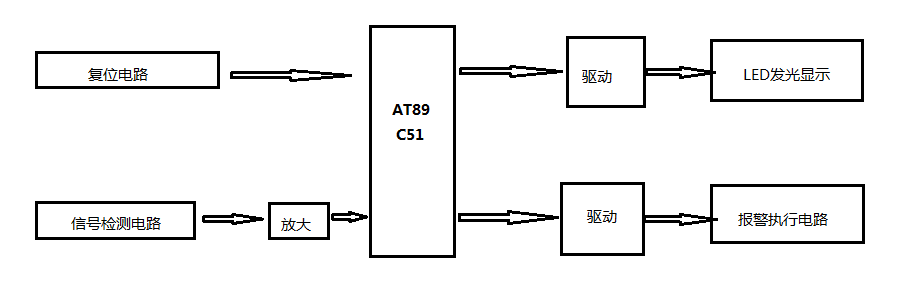
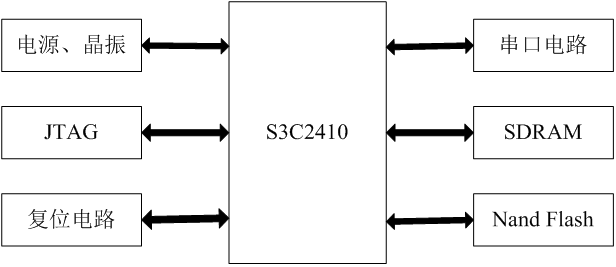
4.1 系统总体框架 4
4.2 系统设计方案 4
5 车体模板分析 4
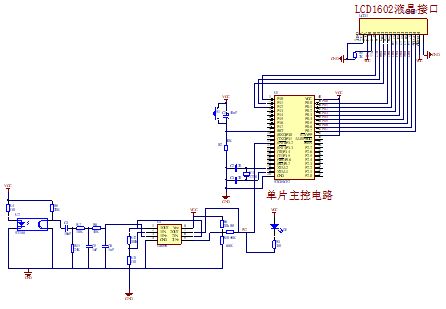
5.1 Arduino控制板模块 4
5.2 电机驱动模块 5
5.3 供电模块 5
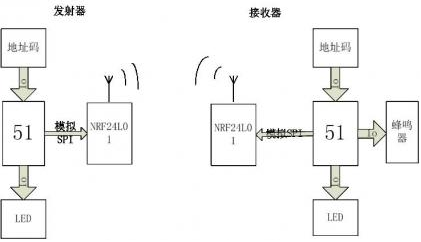
5.4 超声波模块 5
5.5 电路工作原理 5
6 设计的调试: 6
7 总结设计电路的特点及方案的优缺点: 6
7.1 设计电路的特点 6
7.2 方案优点 6
7.3 方案缺点 6
致 谢 8
系统设计方案
①接通电源后,将开关按下,智能小车处于前进的状态。
②通过超声波探头测得的距离,将其显示在1602显示屏上,并作出相应的车体反应。当超声波探头测得的距离小于60cm时,小车车体的左轮继续运转,右轮停止运动,因此小车向右行驶,直到前方60cm不再有障碍物时继续前进。
③按下车体上的电源,小车停止运动。
参考文献
[1] 何立民. 单片机技术的现 状与未来[J]. 中国计算机报, 2012年 No:30.
[2] 周淑娟. 基于单片机智能寻迹小车的设 计方案[J]. 工业技术与职业教育,2011 年6月第9卷
[3] 刘南平. 电子产品设计与制 作技术[J]. 科学出版社,2008.
[4] 张友德 .单片机 原理与应用技术 .机械工业出版社,2004.