




苏ICP备112451047180号-6
基于UG三维的管道机器人结构设计
摘 要
随着船舶工业的迅猛进步,管道的维护与管理日益凸显出其重要性。为了提升管道维护的效率和安全性,本文提出了一种创新的管道机器人结构设计。该机器人具备自主导航、管道状况检测、清洗和维护等功能,旨在降低工人的劳动强度,提高维护效率。
本文首先概述了管道机器人的研究背景及其重要性,随后详细阐述了机器人的结构设计,包括其机械结构、控制系统以及传感器系统等核心组件。此外,文章还对管道机器人的未来发展进行了展望,旨在为船舶工业的智能化和自动化发展提供有力的技术支持。
本次设计的管道机器人特别适用于直径为400-1000mm的管道检测。其机构设计包括以下几个关键部分:
1. 列车式两段机身结构,这种设计使得机器人能够通过一些弯道,增强了其适应性和灵活性。
2. 伞状的运动结构,通过伞状运动结构的伸缩,机器人能够适应不同内径的管道,进一步提高了其通用性和实用性。
3. 前后分置驱动轮,使机器人具备双向运行的能力,提高了其在管道内的操作效率和便捷性。
基于上述计算和设计,我们利用CAD软件完成了数字模型的构建,并通过设计计算验证了本设计的正确性。这一创新设计为管道机器人技术提供了新的方法和思路,有望为船舶工业的智能化和自动化发展做出积极贡献。
关键词:管道;伞型结构;检测
目 录
1 绪论 1
1.1课题研究背景 1
1.2 课题意义及目的 1
1.3 国内外研究现状 2
2管道机器人初步设计 6
2.1 运动方式 6
2.1.1 拖曳式方法 6
2.1.2 非拖曳式方法 6
2.2 驱动方式选择 6
2.2.1 轮式行走 7
2.2.2 履带行走 7
2.3 姿态调整的选择 7
2.3.1 加传感器的关节进行调整 7
2.3.2 利用吊篮方式进行调整 8
2.3.3 采用新式吊环进行调整 8
2.4 自适应分析 9
4基本方案的确定 10
4.1 方案一的设计与分析 10
4.1.1 机身的设计 10
4.1.2检测臂的设计 11
4.1.3伸缩单元 12
4.1.4变量长度单位 13
4.1.5 关节单元 13
4.1.6 驱动轮的设计 14
4.1.7方案一的分析 14
4.2 方案二的设计与分析 14
4.2.1 机身的设计 15
4.2.2 机身内部传动结构设计 15
4.2.3 进给螺杆与螺母的设计 16
4.2.4 吊篮的设计 16
4.2.5 检测臂的设计 17
4.2.6 方案二分析 17
4.3 方案选择及优化 18
5 各部件设计计算 19
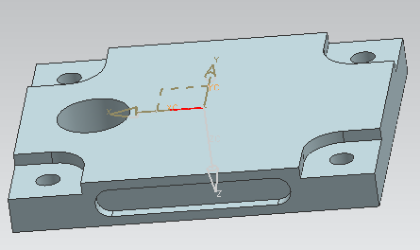
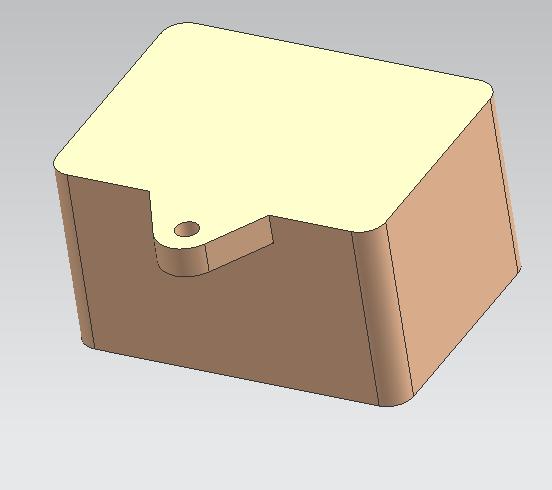
5.1 机身结构 19
5.1.1 机身内部传动机构的设计 19
5.1.2 进给丝杠和螺母的设计 20
5.1.3选择联轴器 24
5.1.4选择键 25
5.2吊环的设计 25
5.3 轴承的设计 26
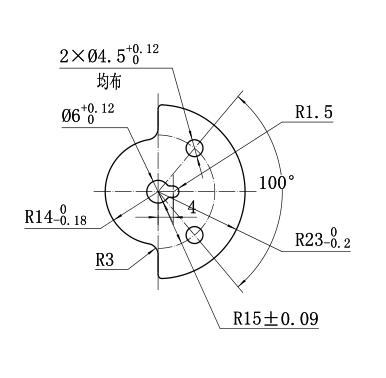
5.4 检测臂的设计 27
5.5 驱动轮的设计 28
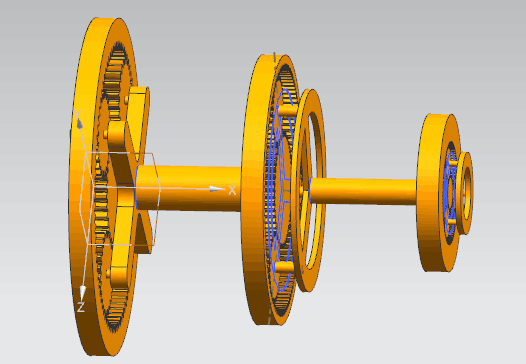
5.6总体装配体设计 29
6 总结 30
参考文献 31
致 谢 33
1 绪论
1.1课题研究背景
管道机器人课题的研究背景主要基于以下几个方面:
1. 管道系统的重要性:管道系统负责输送各种液体和气体,如燃油、淡水、压缩空气等,是船舶正常运行的关键部分。一旦管道系统出现故障,可能会直接影响船舶的安全和性能。
2. 传统检测方法的局限性:传统的管道检测方法,如人工检测、内窥镜检测等,存在工作量大、效率低下、精度不高等问题。这些方法往往需要人工进入管道内部,不仅工作量大,而且存在一定的安全风险。
3. 机器人技术的快速发展:随着机器人技术的快速发展,越来越多的领域开始应用机器人进行自动化作业。机器人具有高精度、高效率、高安全性等优点,能够有效解决传统检测方法存在的问题。
4. 管道机器人的需求:鉴于管道系统的重要性和传统检测方法的局限性,研究管道机器人具有重要的现实意义。管道机器人能够自主运行、检测和维修管道系统,提高检测效率和精度,降低人工成本和安全风险。
综上所述,管道机器人课题的研究背景主要基于管道系统的重要性、传统检测方法的局限性、机器人技术的快速发展以及管道机器人的需求等方面。通过研究和开发管道机器人,有望为船舶行业的自动化和智能化发展做出贡献。
1.2 课题意义及目的
1.2.1 课题意义
管道机器人课题的研究与开发具有深远的意义。首先,管道机器人的应用可以显著提高管道系统的检测、维修效率,降低人工成本,提升船舶运营的经济效益。其次,管道机器人通过自主运行、高精度检测等技术手段,能够有效降低人为因素导致的安全隐患,提升船舶运行的安全性。此外,随着机器人技术的不断发展和进步,管道机器人有望推动船舶行业向自动化、智能化方向转型升级,为行业发展注入新的活力。
1.2.2 课题目的
本课题的主要目的包括以下几个方面:
1. 设计并开发一种适用于管道系统的机器人,具备自主运行、高精度检测、维修等功能。
2. 通过对管道机器人关键技术的研究,提升机器人在复杂环境下的适应性和稳定性,确保其在管道系统中能够稳定运行。
3. 通过实验验证和仿真分析,评估管道机器人的性能表现,为实际应用提供可靠的技术支持。
4. 通过对管道机器人课题的研究,推动船舶行业自动化、智能化技术的发展,为行业的可持续发展做出贡献。
综上所述,管道机器人课题的研究与开发不仅具有重要的现实意义,而且具有深远的社会经济价值。通过本课题的研究,有望为船舶行业的自动化、智能化发展注入新的动力,推动行业的技术创新和转型升级。
1.3 国内外研究现状
1.3.1国外研究现状
经过长期的实践,管道检测主要依赖于定期的检测手段。这些手段包括漏磁法、磁记忆检测法、超声波法、祸流检测法、射线检测法、应力波检测以及声发射检测等。然而,这些方法在实际应用中面临一些挑战。由于需要对振动信号和图像处理,噪声的存在使得从管道上采集的信息难以准确反映管道的实际运行状态。此外,多数方法基于电类传感法,容易受到磁场等外部因素的干扰,可能导致错误的报警信号。在某些恶劣环境下,部分传感器如应变片或声发射装置可能无法正常工作。更重要的是,这些方法多为离线检测,无法实现分布式、实时、在线和长期的监测,因此检测结果难以全面反映管道的实际运行状态,也无法对管道的大变形、泄漏和破损等事故进行及时预警。
目前,管道内检测主要包括普通清管、测径清管器检测、通径检测器检测和智能清管器检测四个阶段。普通清管器和测径清管器的结构和作业工艺已相对成熟。而通径检测器和智能检测器则涉及传感、检测、计算机、信号处理与分析等高端技术,它们在管道内检测中扮演着至关重要的角色。特别是通径检测器,作为管道内检测不可或缺的一部分,主要负责管道内径、路由等测绘工作,为后续的漏磁检测器等智能检测器提供安全保障。
从国际视角来看,管道检测技术的发展已有近百年的历史。早在1929年,壳牌石油公司就针对高温下使用的石油管道腐蚀、膨胀等问题,申请了有缆式通径检测器的专利。自1980年代起,随着管道检测需求的增加,以TDW公司为代表的多家公司开始进行相关研究,并获得了大量专利。经过长期的技术积累,国外已经成功开发并投入使用了多款成熟的管道检测产品,并在实际应用中取得了显著效果。
通径检测器在国外的发展主要经历了两个阶段。20世纪90年代,通径检测器主要采用接触式设计,其检测臂在支撑弹簧的作用下与管道紧密接触,当通过管道变形处时,检测臂以根部为中心旋转,将变形信号传递给数据记录舱,并通过走纸方式记录。随着直线位移传感器的出现,这种走纸记录方式逐渐被取代,管道变形的信息被转换成电压信号进行存储。进入21世纪,随着检测传感技术的不断进步,小尺寸的直线位移传感器和角位移传感器等开始得到应用,每个检测臂都单独连接一个传感器,从而极大地提高了检测精度。此后,出现了集通径检测和漏磁检测于一体的非接触式通径检测器,它采用大容量数据实时采集与存储技术,并通过高级软件进行数据处理和分析,可以直接在计算机屏幕上还原管道的原貌。
非接触式通径检测器与接触式通径检测器各有其优缺点。非接触式通径检测器利用涡流感应、超声波等技术,除了能够检测管道直径外,还能检测管道裂纹、金属损伤以及管内外缺陷,具有高精度和良好的检测效果。然而,接触式通径检测器虽然其检测能力和精度可能不如非接触式,但其原理简单、成本低廉,并且在测量管道直径时,由于直接与管道接触,不易受管壁杂质的干扰,因此数据稳定可靠。
1.非接触式通径检测器
鉴于非接触传感器技术的复杂性和检测的不稳定性,非接触式通径检测在管道检测领域的应用相对较少。ROSEN公司在此领域技术领先,其开发的通径检测器采用周向均匀分布的非接触式几何传感器,可精确测量传感器表面至管道内壁的距离变化,进而还原管道实际状况。该检测器融合非接触距离与电子角度检测,不仅可检测管道直径,还能准确识别凹坑、裂纹等缺陷,且不受蜡和鳞片影响,检测范围覆盖管道周向100%。PipeWay公司、巴西国家石油公司与巴西里约热内卢天主教大学自2004年起合作研究此技术,目前正开发的GMD传感器可实现管道直径、金属损伤及内外缺陷的全面检测。其核心技术挑战在于避免传感器间的相互干扰,以及后期数据处理与分析。
2.接触式通径检测器
根据检测臂结构的不同,接触式通径检测器可分为轮式、杆式和探针式。
3.轮式通径检测器
包括Weatherford公司的高精度多通道检测器、PSI公司的多通道检测器、Pipesurvey International公司的管道检测器以及LIN SCAN公司的检测器等。该类检测器配备可相对转动的轮子,便于检测臂在管壁上滑动。检测臂数量随管道尺寸变化,直径越大,检测臂越多。但受轮子尺寸限制,检测分辨率有限,无法实现内壁360°全覆盖测量。此外,轮子磨损会影响检测准确性,长期运行后需对轮子进行更换。
4.杆式通径检测器
如Roxby Services公司的多通道检测器和美国TDW公司的检测器。检测臂无轮子,直接与管道内壁接触或通过间接方式接触。为避免划伤管道或内涂层,检测臂头部通常设计为光滑曲面。部分检测臂隐藏在皮碗下或安装橡胶垫片,以减少对管壁的直接影响。尽管进入管道前经过校准,但检测器在管道中的磨损仍难以准确评估。
5.探针式通径检测器
相较于轮式和杆式检测器,探针式检测器具有更高的检测精度和更多功能。其精细的检测臂结构能够识别管道内壁的腐蚀坑、裂纹等缺陷。通过轴向布置多个检测臂安装盘,每个盘安装多个检测臂并错开相应角度,可实现周向360°全覆盖检测,确保高检测精度。PipeWay公司和巴西国家石油公司均已有成熟产品,PipeWay公司的新型探针式检测器最小可分辨0.1016mm的尺寸变化。
1.3.2国内研究现状
自20世纪80年代起,国内开始致力于通径检测器的研发。1988年,中国石油天然气总公司管道科学院携手天津激光技术研究所,成功研制出D500型原油管道通径仪,并顺利投入现场应用。次年,四川石油管道局亦独立研制并试验了输油管道测径仪。至1993年,中国石油管道技术公司与北京泰能计算机工程公司联合开发出DN-700型电子式管道通径检测器。这两款通径检测器与美国Precision Pigging公司的通径检测器相似,均采用单通道设计,检测臂汇总至中央积分盘。在管道变形时,检测臂受压并将信息经中央积分盘记录至记录仪上。相较前者,DN-700型通径检测器的优势在于采用电子式数据记录与存储,摒弃了原始的走纸记录方式。
2003年,中油管道检测技术有限责任公司针对我国西气东输工程的φ1016管道,研发出DN-1000型管道通径检测器,以满足大口径管道的检测需求。2009年,周以琳对管道内形变检测仪进行研制,该仪器专为φ457管道设计,通过变形检测轮将变形信息传递给位移传感器,并转换为电信号储存于电子仪器舱内。这两款通径检测器与美国Weatherford公司的高精度多通道通径检测器类似,检测臂均配备独立直线位移传感器,且每个测径检测臂装有两个轮子。DN-1000型检测器记录信号于硬盘,而周以琳设计的检测器则将数据储存于CF卡中。
2007年,靳世久对管道通径仪电子记录系统及配套软件展开研究,运用压缩算法优化了电子包性能,降低了功耗并改进了里程轮算法。同时,他利用Delphi的文件操作与数据库管理功能,对通径仪硬件采集的二进制数据进行分析处理,从而自动获取管道变径信息。此外,杨理践在接触式与非接触式通径检测器研究方面均有所建树,申请了两项关于接触式通径检测器的发明专利,并基于电涡流传感器的基本原理,成功研制出非接触式通径检测器,并进行了模拟试验。
目前,中油管道检测技术有限责任公司、天津绿清管道科技发展有限公司等企业在通径检测器研发方面已取得显著成果,产品已投入实际应用。然而,在提升产品性能和数据可靠性方面仍有待加强。
纵观国内外通径检测技术的发展历程,尽管取得了显著进步,但仍存在以下问题亟待解决:首先,受传感器采样频率限制,通径检测器在管道内的运行速度不宜过快,理想速度维持在3~5m/s。为确保检测器在大口径、高压力管道中的稳定运行,已研制出清管器调速系统。然而,关于如何使调速后的通径检测器在管道上升、下降段实现更平稳运行的动力学问题仍需进一步探索。其次,通径检测器的检测精度与可靠性是评估其性能的关键指标,如何提高其精度与可靠性、减少不必要的开挖、确保管道缺陷数据的完整与有效收集,仍是当前研究的重点。最后,通径检测器技术的核心在于数据处理与分析,如何正确采集并还原管道实际状况、充分利用与分析数据,以及结合现场经验采用快速有效的算法进行后期处理,对于管道数据的处理至关重要。
参考文献
[1] 宋有聚. Singa 管道机器人在城市管网管理维护中的应用[C]. 城镇水处理新 技术新装备应用技术研讨会. 2012.
[2] RAMELLA C, CANAVESE G, CORBELLINI S, et al. A Novel Smart Caliper Foam Pig for Low-Cost Pipeline Inspection–Part B: Field Test and Data Processing[J]. Journal of Petroleum Science and Engineering, 2015, 133: 771-775.
[3] 王永雄. 管道机器人控制、导航和管道检测技术研巧 [D]. 上海: 上海交通大学, 2012.
[4] NAGAYA K, YOSHINO T, KATAYAMA M, et al. Wireless Piping Inspection Vehicle Using Magnetic Adsorption Force[J]. IEEE-ASME Transactions on Mechatronics, 2012, 17(3): 472-479.
[5] 杨汉元, 肖明尧. CCTV 管道内窥技术在城市排水管道检测中的应用[J]. 城建 档案, 2008(05):42-44.
[6] 李洁. 基于全气动逻辑控制的管道清淤机器人研究与 实现[D]. 北京: 北京交通大学, 2017.
[7] KOLESNIKOV Y L, PTITRYNA A S, BARANOVA O V, et al. Mathematical Model for Pipeline Control Applying In-Line Robotic Device[J]. Indian Journal of Science and Technology, 2016, 9(11): 1-11.
[8] KAKOGAWA A, MA S, HIROSE S. An In-Pipe Robot with Under Actuated Parallelogram Crawler Modules[C]// IEEE International Conference on Robotics and Automation (ICRA). 2014.
[9] 陈宗尧, 颜国正, 王坤东, 等. 关节履带式管道检测机 器人越障性能优化[J]. 上海交通大学学报, 2011, 45(7): 1017-1020
[10] 陈少鹏. 舰船管道检测机器人结构设计及其动力学特性研究[D].沈阳工业大学,2019.
[11] 于舰. 管道机器人的设计与运动控制研究[D].长春工业大学,2019.
[12] 马建强. 管道内封堵机器人的运动特性与仿真分析研究[D].中北大学,2019.
[13] 陈潇, 吴志鹏, 何思宇, 肖晓晖. 自适应支撑式管道检测机器人的通过性设计[J]. 中南大学 学报(自然科学版), 2018, 49(12): 2953-2962.
[14] 闫宏伟, 汪洋, 马建强, 袁飞, 彭方现, 李亚杰. 轮式管道机器人过弯动态特性分析[J].西安 交通大学学报,2018,52(08): 87-94.
[15] 刘彩霞, 袭德利. 螺旋轮式小型管道机器人及其驱动控制系统研究[J]. 制造业自动化, 2014,36(8): 45-48.
[16] D.Lee, J.Park, D.Hyun, G.Hwan, H.Yang. Novel mechanisms and simple locomotion strategies for an in-pipe robot that can inspect various pipe types[J]. Mechanism and Machine Theory, 2012, 56: 52-68.
[17] L.A.Mateos, M.Vincze. DeWaLoP in-pipe robot embedded system[C]. 10th International
[18] Federation of Automatic Control(IFAC) Symposium on Robot Control, 2012, 45(22): 842-847.
[19] 王明盛. 基于 ADAMS 的管道机器人机构设计与仿真分析[D]. 硕士学位论文:西南科技大学, 2010.
[20] Y.H.Zhang, W.L.Feng, S.C.Nian, et al. Traction force and flexible shaft stability analysis of flexible squirming pipe robot[J], Robot, 2013, 35(4).