














��ICP��112451047180��-6
���Dz��ϵ��ά��ģ���˶��������
�������о�����Ҫ���ݼ�������
���Dz��ϵ���нṹ���ա������ȴ�����״�����á������ֵ����߲��̶����ص�, ���������ٶȺϳɺͷֽ⣬�����ڱ��ٴ������㷺Ӧ���ڹ�ҵ���������С�ͨ����������ṩ�IJ�ͬ�ٶȵ���ϣ�����������������ͬ���������ͨ��ͨ������ѧ���㣬�ó��Ľ���Ȳ���ֱ�ۣ���û�������ԣ��������������Ƚϴ�Ӧ�ü�����������ԶԳ��ֵĽ�����ά��ģ��ģ��װ�䣬��ͨ�����ò�ͬ��Լ�����ٶȣ�����������Ӧ�����������ֱ�۶�̬�����ҳ�����ü�����������������ڱ��ο����У������õļ������������ΪUG���汾ΪNX10.0��
����������Ҫ��������⣺
1���ֵ���ά��ģ�����ֵ���ά��ģ��Ҫ�Գ��ֵ���������к�������⣬�Ը������������ĺ��嶼Ҫ�˽⡣������ʹ��UG�ij��ֽ�ģ���ܡ�
2���Dz��ϵ����ƣ����Dz��ϵ��Ʊ�������һ���������������ֳ�������������Ŀ��������һЩ����������װ������������ת��ʵ��Ԥ���Ĵ����ȡ�1��������������������ʵ�ָ��������ȣ�2)ͬ�����������Dz��ϵ�����鴫�������ľ������ȣ�3��װ�����������Ȱ�װ��Ҫ������̫���ֳ���֮���ܱ������ָ���������4���ڽ���������֤�����������ֲ����档
3���Dz��ϵ��װ��Լ���������ְ�������װ��Լ��װ����������û�й�Լ������Լ�����㣬���������档
4���Dz��ϵ���˶�����;��������֪���������UG�е��˶����棬���˶������е����ˡ��˶�����������Ҫ���գ��趨���������������÷����и����˼�Ĵ������������Ͽ۹��ɵķ��档�˶������в��������棬������Υ���������˶���
Ԥ�ڽ���������壺
Ԥ�ڽ��;
1.ͨ�����棬�����������벻ͬ���ٶȣ��Ӷ��������Ӧ���ٶȡ�
2.���������ռ����������Ƶķ��档
3.�����ṩһЩ�ο����ݸ�ijЩ������������о���
���壺
ͨ�������Dz��ϵ����ά��ģ���˶����棬�����Dz��ϵ�и���������⣬�����UG�Ľ�ģ�����Ӧ�á�ͨ��ʹ��UG������ʶ�������������Ƶ�ǿ��ķ���ģ��������UG���趨ģ����ʵ�е�һЩ������Ȼ����д����ļ��㣬Ȼ��ó������Ľ�����ṩ��ʵ������ǿ������ʵ�����ݣ����Խ�ʡ�����ʱ�����Ǯ����Ч���̲�Ʒ�������������Ƴɱ���
Ŀ ¼
��һ�� ���� 6
1.1�����о���Ŀ�ĺ����� 6
1.2�������о���״ 6
1.3 ��������Ҫ�о����� 7
�ڶ��� ���Dz��ϵ���˶������� 9
2.1 ���Dz��ϵ 9
2.1.1���ֽ��� 9
2.1.2���Dz��ϵ����� 9
2.1.3���Dz��ϵ��Ӧ�÷��� 11
2.2�˶����� 11
2.2.1�˶����漼���ļ�� 11
2.2.2���漼������ 11
������ ����UG�����Dz��ϵ��ά��ģ 14
3.1 ���Dz��ϵ��������ģ 14
3.1.1�������γɹ��� 14
3.1.2���ֲ�������ģ 15
3.2����ģ�齨ģ��װ�� 22
������ ���Dz��ϵ���˶����� 28
4.1���Dz��ϵ��� 28
4.2�༶����ģ�� 40
�� �� 42
�� �� 43
�� л 44
�ο����ף� 45
����
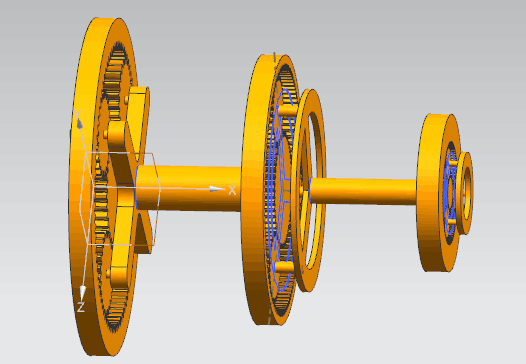
������ķ����������ǿ��Է��֣���Ȧ��ϵ����Ϊ�˶��������̫������Ϊ�����ʱ�������Dz��ϵ�ij�Ȧ���˶�����㶨ʱ�������̫���ֵ��ٶ����������Ȧ���ٶ�����ء�.ͨ�����������������Ȧ��ϵ�˵�ת�ٿ��Ըı������̫���ֵ�ת����С�ͷ����ں��ʵ��ٶ�ʱ��̫���ֵ��ٶȿ��Ա��־�ֹ�����Dz��ϵ��ת�ٵĴ��������Dz��ϵ�������ֵĸ���û�й�ϵ�����Dz��ϵ�����ݵĽ��ٶ���ģ���أ������֮��� �������йء�
ͨ���˶��������ǿ��Ժ�����ֱ�۵ؿ������Dz��ϵ���˶��仯�Ĺ��̣��ټ���ͼ���ķ������Ϳ���ȥ�����о����е��˶����ɡ��˶������봫ͳ���о������ȣ�Ҫ���ɵö࣬ʡȥ������ľ�����ʱ�䡣
�� ��
�� ��
����������Ҫ�о������Dz��ϵ���˶����ɣ�����֪�����ֻ������ִ��Ļ�е�����ڱ�ʹ�õ�ʮ��Ƶ�������ֻ������ٵ������ֱ���������ԭ������������ƽ�ȶ���ȷ�Ĵ�������еЧ�ʡ���ʹ���������߰�ȫ�ɿ��Եȵ�һϵ�е��ŵ㡣��ʵ��Ӧ����һ��Ϊ�ﵽijЩҪ���ʹ�ö�����ְ���һ����ʽ��ϵij���ϵͳ���������������ϵ������ʱΪ�˸���һ����ʹ������Ϊ���ղ���ýϴ�Ĵ��ݹ��ʽ��кϳɻ�ֽ��˶���Ҫ����Ҫ�������Dz��ϵ��
��Ϊ����н�С������ҽṹ�����ܹ�ʵ�ִ��ȡ�������������ǿ�����ݹ��ʴ���ص㣬���Dz��ϵ��ѡ�ý�������ҵ��������⣬�Ľ��������е�ṹ�����Dz��ϵ���ù㷺����������������
�����Dz��ϵ���˶��Ǹ��ӵģ�Ϊ�˶�������о������������о��У�ʹ�õ��������˼�����о��ķ��������Ʊ������IJ²⣬�Ͻ�����֤�������ݽ��й����ܽ�ȵȣ�ͨ����Щ������ʹ�ã����ǿ��Է�������Ķ�������Щ�����Ľ���������ʹ�ã�Ҳʹ�Ҳ�֪�����н���Щ�����õ���ĵط�ȥ��ʹ���ҿ�������ĽǶȸ�����������
��Ȼ�����ڱ������ߵ�ˮƽ���ߣ����в������������õķ����������Ƕ���������жϻ������̫�������������ò���������Ҳ����������ġ�
���Ķ����Dz��ϵ���о�����˵���ֲܴڣ��о��Ļ�ֻ��һЩ�Ƚ�dz�Ա���Ķ�����������������ε������Լ���ϸ�µĶ�����Ҫȥ�о����������ߵ�ˮƽ��ʱ�䣬֪ʶ�ȵȸ��������ص����ƣ���ʱֻ�о�����һС���ˡ�
��Ϊ����н�С������ҽṹ�����ܹ�ʵ�ִ��ȡ�������������ǿ�����ݹ��ʴ���ص㣬���Dz��ϵ��ѡ�ý�������ҵ��������⣬�Ľ��������е�ṹ�����Dz��ϵ���ù㷺����������������
�����Dz��ϵ���˶��Ǹ��ӵģ�Ϊ�˶�������о������������о��У�ʹ�õ��������˼�����о��ķ��������Ʊ������IJ²⣬�Ͻ�����֤�������ݽ��й����ܽ�ȵȣ�ͨ����Щ������ʹ�ã����ǿ��Է�������Ķ�������Щ�����Ľ���������ʹ�ã�Ҳʹ�Ҳ�֪�����н���Щ�����õ���ĵط�ȥ��ʹ���ҿ�������ĽǶȸ�����������
��Ȼ�����ڱ������ߵ�ˮƽ���ߣ����в������������õķ����������Ƕ���������жϻ������̫�������������ò���������Ҳ����������ġ�
���Ķ����Dz��ϵ���о�����˵���ֲܴڣ��о��Ļ�ֻ��һЩ�Ƚ�dz�Ա���Ķ�����������������ε������Լ���ϸ�µĶ�����Ҫȥ�о����������ߵ�ˮƽ��ʱ�䣬֪ʶ�ȵȸ��������ص����ƣ���ʱֻ�о�����һС���ˡ�
�ο����ף�
[1] ������.��еԭ������ƣ��ϲᣩ [M].����:��е��ҵ�����磬2009.1��2014.1��ӡ��
[2]��������ҵ��ѧ������ѧ������.������ѧ�����߰�[M].�ߵȽ��������磬2009.7��2013.5��ӡ��
[3]����ε,������.����ѧ�̳̣��ڶ��棩�ϲ�[M].�ߵȽ��������磬2006.11��2012.11��ӡ��
[4] ��������,¬��ռ��,��������ԭ��[M].�Ϻ�:�Ϻ���ѧ���������磬1984
[5] �Ƽ��� ��ͨUGNX7.0���İ�ģ�����[M].��������ѧ������2011.6
[6] ����Ӣ������װ�����ϵͳ���о�[J].��е��������죬Aug.2002��
[7] ��е����װ������ֲ��²�[M]����������е��ҵ�����磬1998��12
[8] ����ǫ,������. ���������dz��ִ������[M]. ��е��ҵ������,1987
[9] ����.����UG��2K-H���Ǽ�����������������[D].˶ʿ����,���Ͻ�ͨ��ѧ��2004
[10] �����. ���Ǵ����������[M]. ������������ҵ�����磬1980��3��11
[11] ����.�����ݸ˱õķ��ʽ���ʷ������Ǽ���������о�[D].˶ʿ����,���������ݴ�ѧ,2004
[12] �����ֲ�ίԱ�ᣬ�����ֲᣨ�ϣ�[M].��е��ҵ�����磬1995
[13] ��³��.GSϵ�и��ٽ�����Բ�����ִ���CAD[D].˶ʿ����,֣�ݻ�е�о���,2003
[14] ����,�����.solidwords2003��ͨƪ[M].��е��ҵ�����磬2004
[15] Rakhit, A.K. Effect of index variation form of an epicyclic gear reducer teeth on turbo-generator set vibrations[C]. Proceedings of the 1992 International Power Transmission and Gearing Conference�� Sep 13-16 1992, Scottsdale, AZ, USA
[16] ����.��еԭ��[M].����������������ҵ��ѧ�����磬1998
[17] �����.���������Ǵ������о�[D].˶ʿ����,��ɽ��ѧ��2001
[18] ����.����UG��2K-H���Ǽ�����������������[D].˶ʿ����,���Ͻ�ͨ��ѧ��2004
[19] ���ڱ�.˫���߸������������Ƽ���CAD[D].˶ʿ����,�����Ƽ�ѧ��2003
[20] ���Ƿ�.�ɿ��������dz��ּ���װ�õ��о�[D].˶ʿ����,�����Ƽ���ѧ��2003
[21] ������,������,������. ����ʽ������Ǽ��������������Ԫ����[J].��������ѧԺѧ��,2005��01��
[22]������.��е���(���İ�)[M].�������ߵȽ���������,1998
[23]��֮˸.��е����ۺϿγ����[M].�������ߵȽ���������,2003
[24]��ʫ��������.��еѧ��չս���о�[M].���� �廪��ѧ������,2003
[25]�ƽ���.��е���[M].�Ϻ� �Ϻ���ѧ����������,1984