

苏ICP备112451047180号-6
苹果采摘机底盘设计
一、选题的目的和意义
目的:我国是苹果种植大国,种植的苹果种类多样,产区遍布全国各地,因此耕种苹果的成熟时间也有所不同。有的种类会很早生长成熟,在7月份左右就长熟了;而有的则是在9月份左右生长成熟。如果是在长江以北地区进行栽种的话,成熟时期则是比较晚的,多是在10-11月份左右成熟。随着我国果蔬类行业的快速发展,在果蔬生产作业中,采摘工作达到整个工作量的40%。采摘机械化可大大提高此阶段的工作效率。在采摘工作中,采摘机的行走机构大大关系着机器的工作效率和工作范围。在经济林生产中,苹果的采摘需要苹果采摘机的行走机构灵活地运动,以便能提高工作范围和效率,以达到高效的连续工作。因此,需要通过苹果采摘机器的行走机构设计来解决机器的工作灵活性相关问题。应用于果类采摘的机械应当具有可爬坡、越坑、阶梯性强的底盘工作性能。广泛适用于平原、山区、丘陵、温室等区域种植的果树果类采摘收获。
意义:苹果种植业的迅速发展提升了果园机械的市场需求。采摘作业所用劳动力占整个生产过程所用劳动力的33%-50%,目前我国的苹果采摘绝大部分还是以人工采摘为主。苹果采摘作业比较复杂,季节性很强,若使用人工采摘,不仅效率低、劳动量大,而且容易造成果实的损伤,如果人手不够不能及时采摘还会导致经济上的损失。使用采摘机械不仅提高采摘效率,而且降低了损伤率,节省了人工成本,提高了果农的经济效益,因此提高苹果采摘作业机械化程度有重要的意义。用机械代替传统的人力操作完成苹果采摘作业,能抢农时,减少损失,为果树生长发育创造良好环境,促进果品优质高产。
二、相关文献综述(1000字左右,与主要参考文献对应)
谌稳帅在《水果采摘机器人采摘及跟随收集系统的研究》中分析了目前采摘机器人在收集效率上的不足,提出了水果采摘跟随收集的方案。分析现行主流的定位方案并选用了UWB定位技术,对UWB测距方法及定位算法进行分析,结合卡尔曼滤波算法优化了定位结果,降低了观测噪声。制作了气吸式采摘执行机构和配套的便携采摘机,对苹果进行了单果及多果的模拟采摘实验,单果采摘平均耗时仅1.8s,摘取成功率能够达到100%,验证了设计方案的合理性与实用性。完成了挂臂式直角坐标机械臂的搭建,对机械臂的运动性能和采摘效果进行了测试,验证了气吸式采摘执行机构和直角坐标机器人的配合使用在水果采摘领域中可行性。
邵强、郭晓云、朱紫薇、李龙男、程志昂、邱新伟在《自走式柔性智能苹果采摘机设计》中设计了一台苹果采摘机,分为识别定位系统、运行系统、采摘系统和手臂伸缩系统。识别定位系统:采用颜色识别定位的方法。采摘系统采用圆弧形采摘爪的设计,使采摘过程更加简单,接收到采摘指令后,采摘爪将苹果包裹其中,可以忽略采摘夹持力的大小。手臂伸缩系统: 手臂伸缩系统的设计以工业机械手为原型,主要完成机械手的定位和将苹果运送至车厢内的过程。
陆明、贾艳春、王立在《100t汽车起重机底盘转向传动机构优化与试验验证》中对改进后的汽车起重机底盘进行实际试验,验证优化理论的可行性和正确性。汽车起重机底盘的机动性常用最小转弯直径来衡量。但是底盘的高机动性应有2个条件保证,即首先应使左、右转向轮处于最大转角时,前外轮的转弯直径值应在底盘轴距的2-2.5倍范围内。将改进后的转向摇臂和拉杆应用到该汽车起重机上,由于改动量较小,起重机底盘及底盘上的各种液压管、气路改动均较小,在节约成本基本及不增加成本的基础上,取得良好的改进效果。
祝前峰、李奉顺在《苹果采摘机械的研究现状与发展趋势》中发现苹果采摘是苹果生产过程中最耗时、最费力的一环。分析了现有苹果采摘机械存在的主要问题,即结构单一、识别定位不准确、采摘柔顺性差、采摘效率低、成本高昂等,针对这些问题分析原因并寻找对应的解决方案。未来苹果采摘机械必定朝着智能化、信息化、高精度、高效率、低成本的方向发展,逐步取代人工采摘,实现较高的经济收益。
许多学者对苹果采摘机市场价值和机械性能方面进行了深入研究,这使我的课题有了许多可以参考的内容,但其中没有太多针对土地特殊因素对于采摘效率、机械行走机构性能的影响,我觉得这一性能对采摘机的工作过程有着决定性因素。因此我相信本文可具有一定的研究价值和的现实意义。
三、研究内容
1 前 言
1.1 研究目的及意义
1.2 履带式行走底盘设计的国内外发展状况
2 设计任务书
2.1 总体设计依据
2.2 产品用途
2.3 产品的主要技术指标与主要技术参数
2.4 设计的关键问题及其解决方法
3 设计方案的比较分析与选择
3.1 行走底盘方案
3.2 履带行走装置的设计
4 履带底盘相关性能的计算
4.1 牵引性能计算
4.2 转向最大驱动力矩的分析与计算
5 关键零部件设计与校核
5.1 轴的设计与校核
5.2 驱动轮的校核
5.3 轴承的寿命校核
5.4 键的设计及其校核
5.5 机架的校核
5.6 螺栓的设计及校核
6 总 结
参考文献
致 谢
四、研究方法、步骤及措施等
研究方法:
(1)通过网络和图书馆查找关于苹果采摘机地盘机构的相关资料,对苹果采摘机地盘机构设计进行方案的比较和预定;
(2)分析苹果采摘机底盘机构的结构与参数;
(3)了解各类苹果采摘机行走机构其设计原理,熟悉机械设计制造理论;
(4)研究国内外采摘机地盘机构的设计工艺,改进采摘机底盘机构的设计方案;
(5)确定设计总体方案;
(6)确定具体设计方案;
(7)图纸的绘制;
(8)说明书的整理与总结。
研究步骤:
(1)前期准备:明确论文研究方向,制定研究计划,查阅相关资料,了解破冰除雪机的基本运作方式。议定论文提纲。
(2)撰写文献综述与开题报告:整理收集到的相关资料,向指导老师咨询相关意见。
(3)论文撰写:资料的收集,并定期阅读相关文献,清楚了解了破冰除雪机的基本设计理念与步骤,分析了现有苹果采摘机地盘机构所存在的问题,并尝试找到解决对策;
构思论文框架、设计设备图纸、归纳整合相关资料提高了写作水平,加深对于苹果采摘机地盘机构的认识及了解,并完成了论文初稿的摘要及撰写。
(4)论文评审及答辩
将论文定稿提交指导老师、评阅教师评审,并准备答辩。
研究措施:
(1)搜集阅读与论文相关的文献资料,丰富自己对于苹果采摘机地盘机构的了解,提炼出重点内容,突出重点,详略得当。
(2)对论文整体文字进行润色,提高自己的语言表达能力,做到语句通顺,认真阅读和细心核对论文撰写规范,检查论文格式,符合学校要求,在规定时间内完成指定的任务。
总 结
为了提高农业机械的生产效率,满足社会的广泛需求,对履带式行走底盘进行了重新设计。经过大量的设计与计算,这款30 Mpa、550 r/min的马达可以提供出色的性能,使机构在运行时可以获得充沛的动力,因此,本研究的结论是:
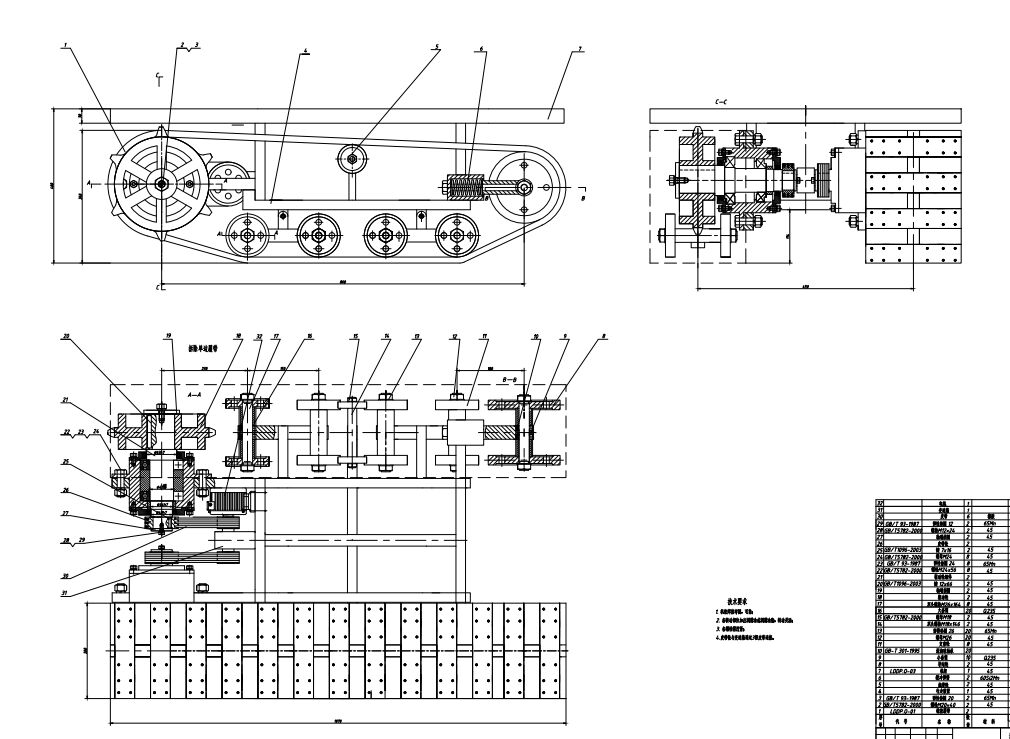
(1)经过仔细探索,发现履带底盘的结构设计十分精妙,它的宽度可以达到200 mm,总长可以达到2300 mm,轨距可以达到450 mm,轮距可以达到860 mm,而且履带的高度也可以达到360 mm;
(2)经过设计,履带车辆的基本性能达到了令人满意的水平,其驱动力达到8.085 kW,牵引力达到13.23 kN,而且其运动的平均速度可达到0.5~1.5 m/s;
(3)在履带的设计过程中,应当充分考虑弹簧的性能,其有效圈数可达7,节距可达12 mm,间距可达7 mm,从而确保履带的精准拉伸。
这种设计的特色是:它具有高度的可靠性、紧凑的尺寸、轻巧的重量以及低廉的价格,可以被广泛应用于各种复杂的地形状况。尽管本次设计有一些优点,但仍存在一些挑战,比如计算结果需要在实际生产后进行检验和验证;可以对整体结构进行有限元分析,从而优化设计;通过计算机仿真技术对主要部件和结构进行深入分析和研究,以确保其可靠性和合理性。
参考文献
[1]江力,番茄采摘机械手关键技术研究[D].吉林大学,2021.
[2]杨栋皓,蒋爱德,苹果采摘机械手的设计与实现[J].农业开发与装备,2020(11):117-118.
[3]左斌,张永康,郭南初,多功能苹果采摘包装机的设计与仿真[J].实验室研究与探索,2022,39(09):108-113.
[4]杨康,农业机器人柔性手爪关键技术研究[D].湖北工业大学,2022.
[5]白克,基于PLC和机器视觉的采摘机器人智能控制系统设计[J].农机化研究,2021,43(02):212-216.
[6]刘校峰,王硕,沙文浩,可伸缩、定力矩、自运输式苹果高效采摘机械手设计[J].南方农机,2020,50(18):32+59.
[7]孔盛杰,庞豪杰,赖鑫卢,胡诗怡,蔡英杰,一款辅助型人工苹果采摘器的设计[J].南方农机,2020,50(15):69.
[8]王奎朝,王忠雷,邵继刚,张荣光,自动识别成熟度的苹果辅助采摘机械手设计[J].农业开发与装备,2019(07):88-89+105.
[9]赵春光,苹果采摘机械手的设计与优化[D].哈尔滨商业大学,2021.
[10]谢丰,移动苹果采摘机械手设计及其运动规划[D].江苏科技大学,2021.
[11]聂腾伟,机器人采摘动作解析与实验研究[D].华南理工大学,2021.
[12]李俊良,张天周,朱天奇,崔冰艳,基于连杆机构采摘机械手的设计[J].科技创新导报,2019,16(10):114-115.
[13]张勇斌,一种自动采摘苹果机器人的设计[J].精密制造与自动化,2019(01):33-38.
[14]徐莉,刘喜平,王国富,张建,王国庆,马驰,李子康,王静波,一种苹果采摘机器人的设计和制作[J].机械研究与应用,2018,31(05):133-134+137.
[15]鲁旭阳,后刚,白和良,刘锋,陈荣辉,机械手便捷采摘苹果装置探究[J].粮食科技与经济,2018,43(09):93-94.
[16]王立谦,吴蕾,基于ARM的采摘机械手运动控制及避障研究[J].农机化研究,2021,41(02):74-77+97.
[17]刘师宇,王子藤,李强,元奕丁,张成鑫,刘洪萍,果园便携采摘系统的研究设计[J].陕西农业科学,2020,64(04):97-100.
[18]Chen Wei long,Chao Fang lin. Vibration-dependent cutting marks and redesign of crawler track of a multiblade saw[J]. International Wood Products Journal,2022,13(2).
[19]Wirtgen GmbH;Patent Issued for Road Construction Machine,Crawler Track Unit Of A Road Construction Machine,As Well As Method For Tensioning A Chain Of A Crawler Track Unit (USPTO 10,562,573)[J].Journal of Engineering,2020.
[20]Hans Hall GmbH; Patent Application Titled "Crawler Bar Of A Crawler Track" Published Online(USPTO 20190375471)[J].Politics &Government Week,2020.
[21]Klubnichkin Vladislav,Klubnichkin Evgeny,Yakovlev Maxim,Makarov Vladimir,Belyakov Vladimir.Designing a Tracked Running Gear of a Radio-Controlled Harvester[J].MATEC Web of Conferences,2020,329.