



��ICP��112451047180��-6
��ϴ���۳��������Ṥ��վ����������
ժҪ
����������ҵѸ�ٷ�չ�� ���������Ӵ���г������Լ�������;����Ķ����ԣ� ���� ����ר�ó�����С��ģ���ң� ���ܳ��ܳ����Եĸ��˹����ã� ��˶Եͳɱ��Զ����豸�� �����е�������������������˹���ҵʱ�䳤�� ���϶������˺����أ� �Ҵ˹��նԹ��� ����Ҫ��ߡ��Զ����Ṥ��վ���������Ч�ʣ� ���������ɱ��� �ȶ����������� ���̹��� ��ҵʱ�䣬������ҵ����
��������ϴ���۳��������Ṥ��վ����������ΪĿ�꣬ �ṩ�Զ��������������� ������ ������Ƽ�������Ҫ��Թ���վ���в��ַ����� ��������Ṥ��վ�Ľṹ��ƣ� �� ����Ϳ�����˱��塢�綯��������Ҫ����ѡ�ͣ� ���ŵ�װ�ṹ������������ĩ������ װ�úͱ�λ��������������װ�ü����Ͳ��ߵ���ơ��������Ṥ��վ�������߱�̣� �� �ɹ���վ�ķ��棬��֤����Ƶ���ȷ�ԡ�
�����ҹ��˿����仯�ļӾ磬 ����������ҵ�ѳ����ù����й��ѵ������ Ϊ������ �����˵Ľ����������ͳɱ������Ṥ��վȡ���˹��� �ѳ�Ϊ�ִ�������ҵ������������� �о�����֮һ��
�ؼ��ʣ����Ṥ��վ�� ��ϴ���۳����壻����
Ŀ ¼
1 �� �� 1
1.1 �о�Ŀ�ļ����� 1
1.2 �����ⷢչ��״ 1
1.3 ��������� 2
2 ��ϴ���۳��������Ṥ��վ���ܷ������ 4
2.1 ���Ҫ�� 4
2.2 �������Ṥ��վ���岼�� 4
2.3 �������������ѡ�� 5
2.4 ����ĩ�˲���ѡ�� 7
3 ��ϴ���۳��������Ṥ��վ�ؼ��ṹ��� 8
3.1 ���Ṥ��վ�Ĺ������� 8
3.2 �����е�۹켣�滮 9
3.3 ���������ϻ������ 10
3.4 �������ת�������� 13
3.5 ���������żܽṹ��� 13
4 ����վ�ı���������� 15
4.1 ����������� 15
4.2 ���Ṥ��վ�����߱����� 15
4.3 �������Ṥ��վ Smart ��� 21
4.4 ���������� 25
5 �� �� 29
����� 30
�� л 31
1����
1.1 �о�Ŀ�ļ�����
������Ậ�б����ʣ���һ�ּ��ӷ��������°��Ļ�ѧ���ʣ������彡���˺��� ���������ǽ�����ʶ����ߣ���������˲�Ը�������Ṥ�����й��ѵ����ⲻ�ò�ʹ ��ҵ�������˴������߶���˹�����ʹ�ó������е�����Ͷ���С���Զ��������Զ��� �豸���Ӷ�����������˹���������������Ϊ��ҵ������һ��Ҫ���ڣ����ظ��ԡ����� �Թ������� һ�������õ��Զ����豸����������˽������⣬�Գ�Զ�۹⿴��Ҳ�� �߶���˹����þ���ʵ�ݡ�
��������Ƶ�һ�ֳɱ���Խϵͣ����÷�Χ�Ϲ�����Ṥ��վΪ�о�Ŀ�ġ��Ժ��� �Ľṹ��ƣ������ܽ��ͳɱ�����ʵ�����С��ҵ���Ҷ��Զ��������������������� ��������
��ҵ�������ܹ��ڶ��ӵ����������³��������������ظ������Ĺ������ż������ �ơ��������������У����Ṥ���ظ���ǿ���������������Ա��ϣ������Զ������ִ��� ��չ�ı�Ȼѡ��
1.2 �����ⷢչ��״
Ϊ���㹤ҵ�������������ϸ�������ʮ���ĩ�𣬹��ҵ����չ����Ĺ����� ����ʼ�о���������صļ����������������õ���Ϳ��ص������Ӷ������˹��������� ��̽�������������ҵ�� 1969 ���з�����һ̨ר������Ϳ�����ˡ�
������Ϳ�����˵���Ҫ�����Ǽ��ٹ��˵Ĺ������������乤��ǿ�ȣ�����Ҫ������ Ϳ�����˴����˹���ҵ������Ч���Ϲ��˵Ľ�����ȫ��ʹ��Զ���������������������� �����ʡ��������ڵ�ʱ�ĿƼ�ˮƽ�� ���ֻ����˵Ľṹ�ܼ�,����ʮ�ֵ�һ��ֻ�ܶԹ� ����һЩ��������Ϳ����������Ϳ�������뾫�Ƚϵ͡�������ˣ��ڵ�λʱ���ڸ� ���������������˹���Ϳ��ҵ��Ч��Ҫ�ߺܶ࣬��ʱ�������ա��µȹ����Ƚ��ɲ��� �������о��������Դ�֮���������Ϳ�����˵��о���Ӧ�ÿ�ʼѸ�ٷ�չ�����ֺ� �ļ�����һ���������������������վ�������������
����ĿǰΪֹ���ҹ���������ҵ���нϴ�ķ�չ�ռ䣬��ҵ�������г������Ӵ� ����Ϳװ������ҵ֮��Ӱ�����ϴ��г�ռ���ʽϸߵ�������������칫˾,��Ҫ���ܲ� λ����ʿ�� ABB ��˾�������ڵ¹��� KUKA���ձ��İ�����˾���Ϻ����ǿƹ�˾�ȡ� ��Щ��������������̣�����ӵ��ǿ����ʽ𣬻�ӵ�������Ƚ�����������˼������� ��Ʒ���ص��ǣ� 1��������Ӧ����ǿ�� �ڽϿ��̵Ļ����£���������Ȼ���Խ���������ҵ�� 2���������� ����ʧ���ʺ�С�� ����ƽ�ȡ�3�����нϸߵ���Ϳ���ȣ� �����ں��պ��죬���ܵ�������������װ���ȡ�
���£��ҹ���ҵ��������ҵ������ٷ�չ�Σ�����ҵ��������ʶ���Զ��������� �����ƺײ��ò�ͬ�ķ�ʽ��ǿ�������������ľ����������ơ��Զ�����Ϳ�� Ϊ�����˷�չ����Ҫ����֮һ�������ҵ���ϼӴ�Ͷ�룬ı�����ķ�չ�ռ䣬ռ�ݸ� ����г��ݶ���磺 ������������е���칫˾�������ز�����е���칫˾�Ȳ���“У�� ���” �ķ�ʽ����ѧУΪ���У����йػ�����չ“У��” �ķ�ʽ��չ���������ô�ѧ�� �о�����������Դ�����м����� �빫˾���ʽ��������ϣ� ������ǿ��˾���г��������� ���������Ϻ���ʱ������˹�˾���ߺ������ػ����˹�˾�� �Բ���“ ��������”��“���Ⲣ ��” ��˫��չģʽ�� �ȷ�չ��ҵ�����з������� �ֽ��������о������Ӷ�������ҵ���� ������������������й��ء����������빤ҵ���ϣ�ǰ�߿���������Ϳ�����˵ĺ��IJ� �� ROBOX �������Լ���Ӧ�Ŀ���ϵͳ�������Ի����˺��˶�����ϵͳ��ƷΪ���ģ��� ���ڽ�������������ҵ�������IJ�ҵ���������������˴����Ĺ��Ҽ����Ŀ��
��ĿǰΪֹ����������ʮ����Ŀ��кͿ��У� �й�������������Ѿ��� 0 ����չ�� �����ڵij��죬���������Ἴ�����Ѿ��ﵽ���������ȵ�ˮƽ��Ȼ����Ŀǰ�ҹ����Ƚ� ��������˺���ͬ���Ʒ���кܴ�IJ�ࡣ���������е�۵���������У�����ȱ�� �Ի�е�۵Ŀ��ƣ�ʹ�������е�۵�����ܵ��˼�������ơ�����˻����˵�����֪ ʶ��Ȩ���з������ܵ������Թ�����йس��̵���Լ���Ӷ������˻����˵�����ɱ��� ���ߣ� ��ˣ������й����й���С����������˵�� ���ѳ��ܰ�����Զ�����������豸�� ��δ������Ϳ���������ĸ���Ҫ��չ���ƣ���ʵ�����ܻ������������ֻ������绯�� �������Ҫ�ڻ������з����췽��ͻ�Ƽ���ƿ�������ϼ�ǿ���ļ����Լ��ڹؼ�Ԫ�� ��������������������ѶԹ�����ļ���������������̽�����������Ӧ�õ�ȫ�·�չ ���������ҹ����ܻ�����������ʻ������Ų��õĽ��������������˽����������� �IJ���Խ��ԽС��Ȼ���ҹ���Խ[14]��
1.3 ���������
������������ҪΪ�����һ���ܹ�Ϊ��ϴ���۳���װ�����������Ĺ���վ��
��ϴ���۳�Ϊר�����������е�һ�࣬�����ΪԲ���Ρ���װ���ּ�Ϊ���岿λ�� ר�ó�����������������װ��λΪ����Ŀ�ģ�����ר�÷�����������������ض�ʹ�÷� ʽ�Ĵ�����������Щר�������������Ҵ������������̵�������˾������ͺŴ�С���� �����̡� һ���������������̣���ͷ��λ��Ϳ�������ģ�ר�ó�����ֻ��Ҫ����װ��λ �����Ϳ���ɡ����Թ��岿λ�ɵ����������ᣬʹ����С����������ʹ���Զ����� Ϳ����ʡ��Ͷ��ɱ���
�����������£����ŵ�װ����������������ˣ��Թ̶��ڱ�λ���ϵĹ���������ᡣ ���Ż�������˫���ʽ����������ɽ������������λ�ơ���λ����ʹ���������ת�� ���ڹ������������ᡣ�̶���ʽ���ô��͵�����������������ˣ��̶����ڵ���λ���������˹����ᡣ
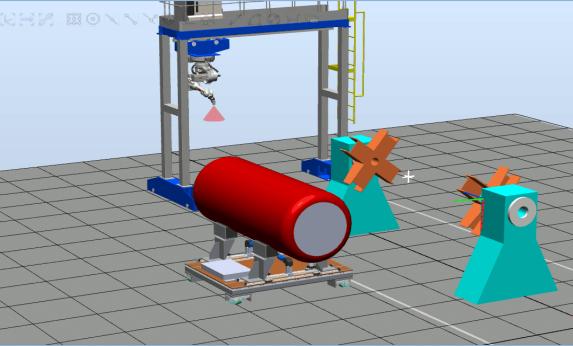
��������Ϊ���������Ჿ����ƣ�Ϊ����վ���岿�֣����佨�� RobotStudio ���� վ����ɷ�����ơ�Ϊ��֤���������ԣ������Ṥ��վ����⣬��������������ϻ��� ���г�����ơ������ϻ����������ð���С�����䣬����װ������ȡ�Ϸ��ϻ�����
�� ��
���Ķ��Զ������Ṥ��վ�����о��� ���������ҵ��ʵ�������������ϣ� ��Ƴ��� ���Ṥ��վ������ ��ɹ���վ�����滮��ơ��Թ���վ�ڲ������豸����ѡ�ͣ� ���һ�� ���Ṥ��վ�Ĺ������̣���������з����̣�ʵ�ַ����Ŀ�ʵ���ԡ�
����Ʒ���Ϊ������ع����ĵ�λ�����һ���������Զ��������豸��ƣ� �ṩ���� ���ϵ�������ݺͶ�Ӧ������ƽ̨�� Ϊ��ش�ҵ��Ա�ṩ����Կɿ�������ȫ�Ļ����� �༭�����ݵ���;�������Ķ��Զ������Ṥ��վ�ṹ������ƣ� ����˹���վ�����Ϲ��ܡ� ���Ṧ���Լ�ת���ܡ����������ϣ������ϴ���۳��Ĺ������Ṥ����
ͨ�����Զ������Ṥ��վ�ɴ�����������Ч�ʣ�������˽������⡣���о����� RobotStudio ��������ģ�⣬ ����ģ������Ԥ��ģ����֮��ȫ��ɿ��ȣ� ����ģ���� ������ʵ���� ������ҵЧ�ܣ� ����ʱ�䣬 �����������������ͨ������ع����ĵ��ã� �� ���˶Թ���վ��ģ�⣬ ��������˶Թ���վ��ȷ���졣��������ƵĽ�����м����� �� ����ҵ�����г��ֵ����⣬ ����������ֶ������� �Ӷ�Ϊ����վ���Ż�����ṩ�˿�ѧ�� �ݡ�
�����
[1] ������. ����ʾ�����Ļ������˶����Ʒ���ϵͳ�о��뿪��[D].������ҵ��ѧ,2021.
[2] ����ӱ. ���ż�˫�ۺ��ӻ������˶��滮�㷨���[D].�Ϻ���ͨ��ѧ,2019.
[3] ����, ������, ����Ȫ, �̺���, ����ǿ. �����ʺ�װ�����������������[J].ũҵ����ѧ��,2020,36(22):298-307.
[4] ��˫ϼ. ��е���[M].�����ѧ������, 201903.351.
[5] ���. ����ʯ�����ķ�������������˽ṹ��������[D].�ӱ���ҵ��ѧ,2018.
[6] ����. �������żܺ��ӻ����˻�е�ṹ�Ż����[D].��������ѧԺ,2022.
[7] ½Ҷ,����.��ҵ�����˺��ӹ���վ�ķ������[J].�Ṥ�Ƽ�,2021,37(06):63-64.
[8] �Ż�,����,������.����Ϳװ�����������о�[J].�ִ�Ϳ����Ϳװ, 2021, 24(12): 61-66.
[9] ������,ë����,տ��Զ,������,�Ͼ���, Ф����,����,����,�½���,֣ΰ��, ���Ľ�,���ɼ�.��ҵ�����˷���Ӧ��[M].�����ѧ������, 201809.221.
[10] ����,��˼Զ,�ų��,Ҧ����,��С��.һ������Ϳװ������������˿���ϵͳӦ��[J].�������������,2019(11):11- 15.
[11] �����. ����������˶��켣�滮������[D].���ݵ��ӿƼ���ѧ,2019.
[12] ��ᴳ, �����,�ž۷�,�ܻ�,������,����,���]�], Ҷ��,�Զ���,������,������,����. ABB��ҵ������Ӧ�ð������[M].�����ѧ������, 201904.196.
[13] ��С��.�������Ṥ�յ��Ż�[J].ʱ������,2019(06):121- 122.
[14] ���Ȼ.�����ղ�����������Ϳװ��������������Ϳ�Զ���ϵͳ���о�[D].�人�Ṥ��ѧ,2017.
[15] Ibiene Sarah Kalio,O. Onwuli Donatus,Abel Callum Ndubuisi,Obisie eke Godgift. Electrolyte Concentrations and Liver Enzymes in Car Spray Painters Exposed to Car Spray Paints within Port Harcourt Metropolis, Rivers State, Nigeria[J]. Asian Journal of Research in Biochemistry,2020.
[16] Zhang Ruijie,Wu Jun,Wang Yutian. Stability analysis of a novel mobile spray-painting robot for touch-up painting in vehicle repair plant[J]. Journal of Mechanical Science andTechnology,2022,36(5).
[17] Ibrahim Kesici,Şeyma Bişkin,Alaa Eleyan. Automatic Object Painting with SCARA RobotUsing Computer Vision[J]. Celal Bayar Üniversitesi Fen Bilimleri Dergisi,2018(1).