


苏ICP备112451047180号-6
立体仓库自动堆垛机控制系统设计
摘要
在自动化立体仓库的工作流程中,堆垛机主要负责立体仓库的出入库工作,自动堆垛机其出入库、取送货均是自动化操作,对比普通仓库可以大幅度的提高工作效率。本文设计了一种主要应用于医药仓库的自动堆垛机,并选用PLC对其运动方式进行控制。
首先,本文介绍了医药公司仓库自动堆垛机的基本工作环境要求,对自动堆垛机的整体控制方式进行了设计。
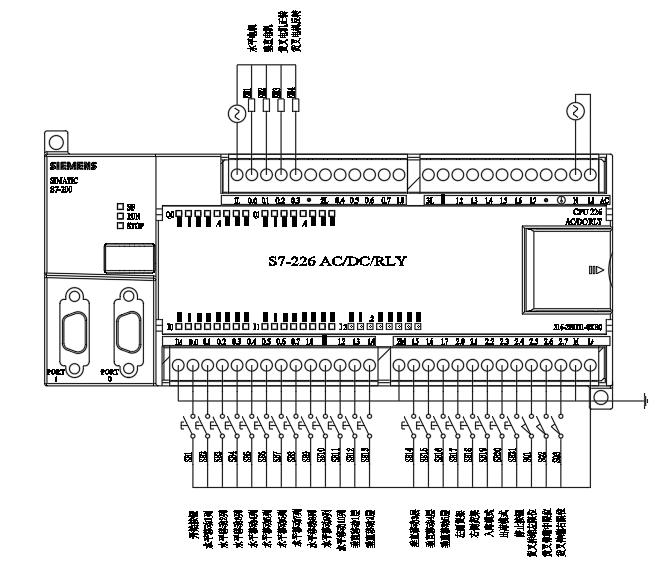
其次,进行了对堆垛机的结构设计,设计了堆垛机的整体结构,并详细设计了水平行走机构、垂直升降机构及货叉伸缩机构,并运用CAD画出了相应机构的配合关系,并选择了西门子S7-200 CPU226型号的PLC作为控制系统的硬件控制核心。
最后,运用Step 7编程软件进行软件程序编写,并进行了仿真模拟,模拟成功表示其可以完成所文设计的工作要求。
关键词 自动化;堆垛机;立体仓库;PLC
目录
摘要 I
Abstract II
第1章 绪论 1
1.1 课题研究背景及研究的目的与意义 1
1.1.1 研究背景 1
1.1.2 研究目的与意义 2
1.2 立体仓库自动堆垛机国内外研究现状 2
1.2.1 国内研究现状 2
1.2.2 国外研究现状 3
1.3 研究的主要内容和方法 4
第2章 立体仓库自动堆垛机总体方案设计 5
2.1 立体仓库自动堆垛机控制系统需求分析 5
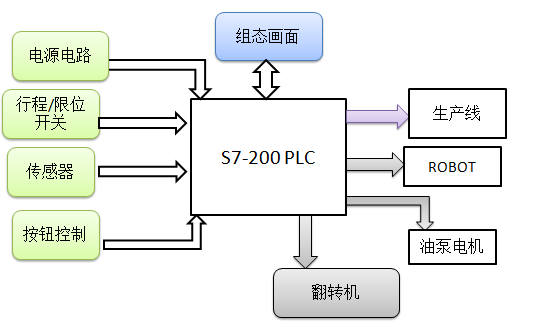
2.2 立体仓库自动堆垛机控制系统设计及组成 5
2.3 立体仓库自动堆垛机结构及工作方案设计 6
2.3.1 自动堆垛机结构及工作方式 6
2.3.2 自动堆垛机工作流程 7
2.4 本章小结 9
第3章 立体仓库自动堆垛机结构设计 10
3.1 自动化立体仓库 10
3.2 自动堆垛机结构选择 10
3.3 自动堆垛机结构设计 11
3.3.1 自动堆垛机结构组成 11
3.3.2 机架 11
3.3.3 水平行走机构 12
3.3.4 垂直升降机构 12
3.3.5 载货台 13
3.3.6 货叉伸缩机构 13
3.3.7 堆垛机安全保护装置 15
3.4 本章小结 15
第4章 自动堆垛机控制系统硬件设计 16
4.1 自动堆垛机控制系统需求分析与性能指标 16
4.2 PLC选型 16
4.3 电机选型 18
4.4 变频器选型 20
4.5 自动堆垛机认址方式选择 20
4.5.1 绝对认址 20
4.5.2 相对认址 21
4.6 本章小结 22
第5章 自动堆垛机控制系统软件设计 23
5.1 自动堆垛机控制流程图 23
5.2 自动堆垛机控制系统梯形图 24
5.3 控制系统的仿真与调试 28
5.3.1 控制系统程序仿真介绍 28
5.3.2 自动堆垛机控制系统仿真模拟 28
5.4 本章小结 30
结论 32
致谢 33
参考文献 34
附录A 36
附录B 43
附录C 49
第1章绪论
1.1课题研究背景及研究的目的与意义
1.1.1研究背景
随着科技的不断发展及人们对于商品的认识,现代化的物流产业作为其中的服务行业已经变得不可或缺,随着全球化风潮的发展,各个企业对于其生产方式、物资流转以及其商品交易的需求将会更加强烈。自动化立体仓库目前还是一个崭新的物流技术,它的发展方向还有很多的可能性,并且它的科技水平也需要不断的提升[1]。
国家发展的根本是生产力的发展,所以作为飞速发展的国家,不断提高的生产力也是自动化立体仓库持续发展的主要原因。随着人口数目的不断增加,土地资源也变得更加珍贵,土地资源短缺是一个国家发展的严重性问题,所以“向空间要货位”的理念得到了物流业主的一致认可。立体仓库几乎都是采用高层货架,这样很大程度的提高了仓库的有效高度,充分利用了仓库的空间,也就提高了空间的利用率。通过立体仓库,可以让货物仓储变得更加集中、更加立体,并降低了前期购置土地的费用。常规来说,在空间利用的效率方面,立体仓库是普通仓库的3-6倍。所以,自动化立体仓库可以为国家的生产力发展产生很大的良性影响。
在自动化立体仓库的工作流程中,堆垛机主要负责完成立体仓库的出入库工作,是自动化立体仓库中最为重要的工作设备。堆垛机的出现解决了如何将货物送至高空货架的难题,能够很大限度的提高立体仓库的的空间利用率。堆垛机的出入库工作均为自动化操作,对比普通仓库可以很大程度的提高工作效率以及减少操作人员的劳累。随着科技的不断发展,对于立体仓库的工作操作要求会更加的严格和繁琐。所以更加透彻的了解和研究如何提高自动堆垛机的控制系统对于立体仓库的未来发展具有极其重要的意义[2]。如图1-1所示。
1.1.2研究目的与意义
随着物流相关企业快速的、大规模发展,立体仓库已经开始成为了各个企业生产经营中的重要部分。立体仓库相对于传统形式的仓库拥有着占地面积小、空间利用率大等巨大优势,正在逐步代替传统形式的仓库,这种更新替代也促使着物流产业的水平不断提高。为了满足当今的大规模生产与快节奏的作业形势,全自动化的立体仓库就如此产生。
作为立体仓库自动化的最重要的环节,自动堆垛机也由此产生,用来进行完成提高空间利用率的高层货架高空作业。其存货取货的工作方式均是自动化完成,在日常生活中立体仓库自动堆垛机在工作的过程中会出现很多的故障,如定位错误、货物放置未达到精准定位、出入库发生错误、货叉伸缩超出限制等。随着科学技术的发展以及控制方式的提升,立体仓库自动堆垛机的生产水平也逐步提高[3]。
本文选择以堆垛机控制系统为研究对象,对堆垛机进行了整体设计,并对设计的工作原理进行了分析,结合了PLC作为控制系统,通过编程对电机以及其他工作元件完成一系列的控制功能,实现了堆垛机的出入库工作,并根据堆垛机所需的工作环境及控制要求,完成并确定了控制系统的总体方案设计。可以满足所用仓库的基本要求,提高企业的工作速度及作业效率。
1.2立体仓库自动堆垛机国内外研究现状
1.2.1国内研究现状
如今自动化立体仓库已经被大规模的使用,与之相配合的科技手段也不断进步。中国在研究立体仓库自动堆垛机的的领域已经有50年之久,在此期间,中国的自动堆垛机在技术上的突破和从未停止[4]。
在2010年的技术改造中,杭州烟草公司在过滤棒管理中引入了过道式堆垛机。这个自动堆垛机有多个输入、输出平台。由于过道深度较深,为提高货运效率,2018年7月25-27日在武汉召开的第37届中国控制大会滤棒会议上,该堆垛机采用了“单轨双轨制堆垛机”的运行模式,即同一轨道上有两台堆垛机,同时,通过合理安排两个堆垛机,充分发挥了立体仓库的运输能力,提高了自动堆垛机的作业效率。
截止到目前,中国产出的自动堆垛机承重量可达2吨、立柱的长度可达24m、工作时的水平行走运行速度可达200m/min、垂直升降运行速度可达50m/min,工作效率平均为每小时完成200次作业。现如今中国的研究已经向承重更大、高度更高、速度更快等方向不断突破,中国制造的高性能堆垛机也在不断发展[5]。
虽然我国产出的自动堆垛机在许多的行业领域被应用,并且在工作时的运行速度、定位精度等方面也有了显著提升,但在现阶段仍然存在着许多不可忽视的问题,比如在高速运行时的噪音产生、运行稳定性较差等方面还需要继续改进。如图1-2所示。
1.2.2国外研究现状
智能型系统自动堆垛机是现如今美国、日本等发达国家正在使用的堆垛机类型。美国研究出一款型号为MINILOAD的高速堆垛机,在立体仓库轨道内的水平行走运行速度可达150m/min,其精准定位可控制在2mm误差以内,然后采用堆垛机的机械装置进行货叉伸缩来完成取送货的作业。目前在发达国家,双排双货位结构的货叉伸缩机构已经普遍应用,相对比普通货叉,每次作业可以取送4个货物,为普通货叉的4倍,大幅度的提高了自动堆垛机的工作效率。这款MINILOAD型号高速堆垛机最快可以达到平均6秒完成一个货物的出入库作业[6]。MINILOAD型高速堆垛机如图1-3所示。
日本的大福公司在2015年研发出了一款拥有高速工作效率的自动堆垛机,其在立体仓库的轨道内的水平行走速度可以达到500m/min,平均每小时可以取送800个货物。如图1-4所示。同时,日本还研究出了可以在同一巷道内同时工作的双堆垛机控制系统,对比一台堆垛机,其工作效率可以达到两倍之多,明显的提高了工作的效率[7]。如图1-4所示。
1.3研究的主要内容和方法
1.查阅相关文献了解立体仓库自动堆垛机系统,包括立体仓库的组成部分、工作流程,自动堆垛机的机械构成、工作原理;
2.根据所查资料,明确立体仓库自动堆垛机的工作要求,根据任务要求设计立体仓库自动堆垛机的机械结构设计方案,并对堆垛机的移动方式、控制方式、定位方式进行重新设计;
3.控制系统采用的是PLC控制,明确PLC的工作原理;
4.构建立体仓库自动堆垛机的控制系统,在需求分析基础上进行结构设计和功能设计。整个控制系统的结构设计又分为硬件组成、软件组成两个方面。根据立体仓库的功能需求,完成移动控制功能、定位功能、安全保护功能的设计;
5.实现立体仓库自动堆垛机控制系统,着重进行移动控制功能及定位功能,并获得最优方案。
参考文献
[1] 李小三.堆垛机控制系统关键技术研究与设计[D].兰州交通大学硕士论文,2014:15-30
[2] 李伟.果蔬气调自动化立体仓库堆垛机控制系统的设计[J].中国农机化学报,2014年,第5期:173-174
[3] 胡晓慧.基于PLC的液晶行业立体仓库自动控制系统的设计与实现[D].北京工业大学硕士论文,2016:25-36
[4] 武松.基于PLC的自动化立体仓库堆垛机控制系统设计[J].中外企业家,2018年,第6期:121-123
[5] 江吴芳.基于多种类货物的立体仓库存取系统设计与实现[D].华南理工大学硕士论文,2017:115-117
[6] 薛婷,苏晓峰,闫起源等.立体仓库自动仓储控制系统的设计[J].机械制造,2017年,第3期:33-36
[7] 冯伟智.某医药公司立体仓库控制系统设计与实施[D].东南大学硕士论文,2016:10-44
[8] MENG J and YANG C.The Simulation Research on Stacker Control in Airport Logistics System[C]. 2007 IEEE International Conference on Automation and Logistics, Jinan. 2007 :1225-1229
[9] 贾京京.长纵深式立体仓库拣选路径优化及堆垛机控制系统的设计[D].兰州理工大学硕士论文,2017:13-22
[10] 孙晶.自动化立体仓库堆垛机控制系统的设计与研究[D].沈阳工业大学硕士论文,2017:67-70
[11] 黄金.自动化立体仓库管理与控制系统的研究与开发[D].哈尔滨理工大学硕士论文,2014:47-60
[12] 李西刚.自动化立体仓库中堆垛机结构设计与控制技术研究[D].沈阳理工大学硕士论文,2014:25-34
[13] SHENGFU Y,JIALI Z and CHIBING H .Route planning of stacker by improved genetic algorithm [C].International Conference on Automatic Control and Artificial Intelligence (ACAI 2012),Xiamen.2012 :1798-1801
[14] 夏莉.自动化立体仓库堆垛机拣选作业调度及其监控系统研究[D].中北大学硕士论文,2016:45-50
[15] 崔国成.堆垛机货叉选型分析[J].物流技术与应用,2012年,第17卷,第2期:92-95
[16] 张乾.基于PLC立体仓库堆垛机的控制系统设计[J].信息技术与信息化,2015年,第13卷,第6期:158-160
[17] 韩天文.堆垛机货叉驱动机构的设计研究[J].科技风,2018年,第5卷,第4期:142-151
[18] HONGHE Y and YUXIANG C.Expert analysis and optimal evaluated model,System Engineering[C].2007 IEEE International Conference on Automation and Logistics, Jinan.2008 :1225-1229
[19] 李宏哲.立体仓库双轨式堆垛机电气控制系统设计[D].哈尔滨理工大学硕士论文,2012:12-15
[20] 王伟超.基于PLC的工业自动化立体仓库控制系统设计[J].电子制作,2018年,第10卷,第5期:44-45
[21] 马殷元.物流装备控制和监控系统关键技术研究[D].兰州交通大学硕士论文,2017:45-67
[22] 张恒.运用触摸屏和PLC实现电动机的正反转[J].中国高新区,2018年,第8卷,第19期:25-34
[23] CHENGTING L.Automatic warehouse[C].Proceedings IEEE Conference on Industrial Automation and Control Emerging Technology Applications,Taipei,Taiwan.1995 :246
[24] 张亭.自动化立体仓库实训系统开发[D].太原科技大学硕士论文,2017:142-151
[25] GANGGANG N and SHUDONG S.Immune evolution algorithm for detetministic job shop scheduling,Journal of Mechanical Engineering [C].Proceedings IEEE Conference on Industrial Automation and Control Emerging Technology Applications,2006 :87-91