



苏ICP备112451047180号-6
基于单片机的防汽车追尾碰撞报警系统设计
毕业设计(论文)的目的及意义(含国内外的研究现状分析):
1. 研究该课题的意义
最近这些年以来,随着我国社会的不断发展,科技也在不停地进步,同时汽车工业也在不断进步,导致汽车增加的数量越来越多。十年前,汽车占所有车辆的比例为33.3%,如今这个数字已经增长到了58.5%[1]。所以公路交通运输已经开始向高密度的方向发展,这就难免会导致一些交通事故的发生,让人们的安全得不到保障。交通事故的主要原因就是车辆之间发生追尾碰撞,所以人们在寻求各种方法来降低行车的危险,使自己的生命安全得到最基本的保障。
之前,人们把主要都防护措施都被动的集中在汽车自身安全方面,用来减轻发生车祸的时候给人们带来的伤害。例如,在汽车的车身上安装一些保险杠、在车内安装安全带和安全气囊等[2]。然而,所有的这些的安全保护措施,并不能减轻发生车祸时给人带来的危害,也不能从根本上解决汽车在行驶过程中发生追尾碰撞的问题。为了避免车祸的发生,必须要主动的去提高和预防汽车的安全状态,使司机提前预知自车与障碍物之间的距离是多少,这样就会极大程度的提升汽车在行驶过程中的安全保障,从而减少车祸等一些事故的发生,保护司机和乘客的安全。该功能的实现,对单片机进入生活有了更好地诠释,电子产品正在不断地改善人们的生活状态,让人们的工作和生活更加有效率,并且可以更加完善地帮助人们解决工作上的问题[3]。
研究防汽车追尾碰撞的技术,对提高汽车自动化水平有重要意义。本毕业设计就是要完成基于单片机的防追尾碰撞报警系统的设计,以及本毕业设计的论文写作。交通事故会给每个家庭都造成了不应该有的经济和精神损失,这样就使得人们在行车的过程中,都紧绷着神经,并且一直处于提心吊胆的状态,反而更容易出现车祸。所以,要想减少事故的发生,必须尽快的研究出防汽车追尾碰撞的技术,得在车辆的防护上花充足的时间,来降低行车过程中潜在的危险,以保证司机和乘客的安全,把发生车辆追尾碰撞的概率降到最低。
测距的方式主要包括激光测距和超声波测距。激光测距制作难度比较大,且缺乏良好的抗干扰能力。相反,超声波则具有良好的方向性、抗光磁干扰能力,还不受空气能见度的影响[4]。所以,要充分利用超声波测距技术,实时检测自车与障碍物的距离,及时的提醒司机,使司机提前预知潜在的危险,就能把各种汽车撞车事故的概率降到最低,让司机安心驾驶,真正的做到司机和乘客一直处在安全状态,减少每个家庭的损失。
2. 国内外研究状况分析
(1) 国内研究状况
随着我国电子技术不断的发展,研究出了多种测距的方法,其中研究超声波测距的技术难度较低,并且具有花费少的特点,在许多的测量领域得到广泛的应用。而且这种超声波测距做出的系统便宜耐用,而且可以达到汽车电子系统自动化的发展需求。
郭清利用超声波对障碍物的检测,当超声波接收端接收到反射波时说明该方向上有障碍物,从而实现自动转向的功能,以避开前进方向上的障碍物[5]。利用超声波检测是一种实用的非接触测量方法,该系统主要由STC89C52单片机最小系统、超声波发射电路和超声波检测接收电路、温度补偿电路及显示电路组成,根据波的反射原理,利用检测声波发出到接收被测物反射回波的时间来测量距离。
王心越,董峰威,谢璐阳等人设计了一种基于360°激光雷达的汽车防撞预警系统,对汽车周围环境分别建立了防撞模型[6]。利用DBSCAN算法实现了点云聚类,并设计了基于ARM单片机的声光报警系统。通过实验测试验证本系统不仅能够及时检测到前后方车辆信息进行提醒,同时可以检测到侧面的车辆信息,进一步提升了汽车的主动安全性,是一种全新有效的汽车主动防撞系统。
我国在测距传感器方面,测距雷达所涉及的关键技术总的来说已经成熟,但是要做到使它适应车上的工作环境,以及提高稳定性、抗干扰能力和目标识别能力等是关键。只有建立合理的安全车距模型,适应不同的驾驶员的要求,才能使每个驾驶员更加熟练地使用超声波测距的功能。目前大多数有关的研究还没有涉及到如何解决路线预测的问题,这就限制了很多实际中所要应用的功能。所以,开发研究的防汽车追尾碰撞报警系统,必须要能够实时获取道路或者其它车辆的信息,以达到能及时提醒驾驶员采取措施的要求,从而避免危险情况的发生[7]。一旦这一问题得到解决,那么我国的防撞技术会得到长足的进步。
(2) 国外研究状况
在上个世纪六十年代,国外一些先进的西方的国家最先开始研究汽车防撞领域[8]。由于当时的技术不够先进,而且硬件的成本比较高,所以做出来的防撞报警器比较笨重、复杂,而且价格昂贵。因而这种报警器得不到大多数人的使用。
当时国外的戴姆勒克莱斯勒公司和沃尔沃公司做的汽车防撞器最为先进。戴姆勒克莱斯勒公司的汽车防撞器的结构主要是两个测距仪和一个影像系统,能够测出安全距离,如果发现车前有障碍物,计算机能够自动引发刹车装置[9]。这个系统能够自动测出前方障碍物的速度和距离,使系统能够自动启动刹车装置。而且能够感知车的行驶状态,如果传感器感到车在左右摇摆,或者感到车内的酒精浓度过高,它就能够自动刹车或者自动锁死方向盘。沃尔沃公司则是在汽车上装了夜视仪,夜视仪能够显示前灯照射距离以外的物体,显示车与障碍物的距离,提示司机刹车[10]。戴姆勒克莱斯勒公司以及沃尔沃公司的防撞器也有一些缺点:如果司机想要超车,在超车的过程中,车的自动防撞器就会测出两车的间距小于安全距离,自动防撞器就会自动刹车[11],这时就会导致车辆在行驶的途中发生不可估量的危险,也有可能发生碰撞事故。
毕业设计(论文)的基本内容和技术方案:
1. 基本内容
本课题是完成基于单片机的防汽车追尾碰撞报警系统的设计。该系统包括测距模块、报警模块、显示模块、按键模块、复位模块等,当距离较短的时候能够及时报警。系统通过雷达传感器测量自车与前车间的距离和相对速度,并且能够显示当前距离。通过主控单元对传感器采集的相应参数进行分析,并判断当前行车安全状态,进而语音输出当前距离,给予驾驶员相应的安全信息,提高行车安全性。将相对距离设定为1米,当相对距离大于阈值时,系统呈正常状态,绿灯闪烁;当相对距离小于阈值,且相对速度小于等于0时,系统呈预警状态,黄灯闪烁,并提示长间隔报警音,长间隔报警声音为3S;当相对距离小于阈值,且相对速度大于0时,系统呈报警状态,红灯闪烁,并提示短间隔报警音,短间隔报警间隔为1S。在此过程中,报警准确度不低于99%并且具有复位功能。
2. 技术方案
2.1 主控制器方案选择
方案一:此部分作为该系统的核心控制器,单片机无疑是最重要的部分。STC89C52在设计中被选择,单片机的存储器模块存储时间很长,单片机软件由MCS-51指令设计的。该指令标准可以在许多设备上应用,并具有很强的普遍性。该单片机的能量消耗也非常小,它具有低功耗的优异性能。单片微型计算机核心是51。现在很多的单片机使用这个核心。该单片机是最基本的8位单片机,它也是在开发和设计中最简单的。该单芯片微型计算机的内部代码有8K。如果大于8K,可以搭配外围存储方案,存储更多的代码。单片机制造完成后进行加密。后来的产品使用后,不会出现技术文件被盗的情况,也不能被任何技术实现解密操作。单片机的任务执行效率很高。通常使用11.0592MHz晶体振荡器。单片机的稳定性非常强,它可以在许多复杂的应用场合稳定工作。该单片机的最大优点是成本低,这也是许多设计中最重要的一点,所以这就是为什么它可以在许多产品设计中可以看到它的原因。因此,无论从能源消耗和价格方面考虑,它具有很大的优势,如工作可靠,费用很小,综合实力强,低功耗和强大的加密功能。此外,STC系列可有效提高系统在核心模块的选择的工作效率,可以在工作状态下在线运行,使系统工作更方便。
方案二:选择MSP430型号处理器,人们也把这种单片机叫做混合信号处理器,这种处理器集成了多种电路模块,主要有三种电路模块,第一种是模拟电路模块,第二种是数字电路模块,第三种是微处理器模块。由德国德州仪器公司生产,1996年这种产品开始在市场上推广,它是一种混合信号处理器,其指令精简,功耗低。在一些便携式的仪器仪表中,对这种单片机的应用比较广泛。但利用这种单片机的开发的难度比较大,价格也相当昂贵。因此,即使是在一些简单的设计中,也不宜采用这种单片机。
方案三:选择STM32F103RBT6处理器,处理器搭配的是ARM型32位的M3核的CPU,此款处理器计算速度快、采购成本低、功耗低的32位处理器。目前此处理器在大量的电子商品上进行使用,比如电子农业领域、电动汽车领域、共享行业等领域,这些领域都有使用此产品的例子。处理器的运行速度可达72兆赫兹,高速的运行,是由于内部设备都可以进行高速操作,STM32最大的特点就是输入输出接口数量多。此款处理器还搭配了两个模数转换器,转换精度达到12个数据位,检测精度很高,可以处理18路模拟数据,处理器的模数转换的很多参数都可以进行代码控制、可编程操作,例如模数转换频率,多通道的扫描方式。
方案选择:由于设计需要低成本,器件效率也需要达到最高,方案二也需要重新转换,设计电路复杂,成本明显高,方案三的利用率会很低,在本设计中方案一可以实现整个系统的功能,成本远远低于方案一,所以选择方案一。
2.2 距离检测方案选择
方案一:超声波技术是建立在物理学,电子学,机械和材料科学的技术上得到测距方案。超声波技术是通过超声波装置发送音频信号,然后发送和接收来实现。超声波的实际距离的测量是通过传播在空气的超声波信号以及超声波的传播速度从超声波发射到超声信号的接收的开始,以获得两者之间的实际距离,在反射回接触到障碍物时,并获得计算机所用的总时间。在超声波发射到接收的信号的过程中花费的总时间是在发送超声波到与障碍物接触,然后将其发送回的过程中花费的时间。根据这个原理,在不考虑外部因素的影响,在理想条件下,计算出的距离可以得到更加准确的数据。
超声波的发射和接收采用 HC-SR04模块,模块包括超声波发射器、接收器和控制电路。采用IO口 TRIG 触发测距,给至少10μs的高电平信号,模块自动发送8个40KHz的方波,并自动检测是否有信号返回,一旦检测到有回波信号则输出回响信号,回响信号的脉冲宽度与所测的距离成正比。由此通过发射信号到收到的回响信号的时间间隔可以计算出距离。测量周期应为60ms以上,以防止发射信号对回响信号产生影响。HC-SR04超声波芯片,它可以很容易地实现测量距离的功能。并在一定区域内,操作时间短,速度快。在本模块中,它能够传输信号,接收信号和控制该系统的相关电路。
方案二:光电开关的全称是光电接近开关,传感器的原理是前方有障碍物遮挡,则传感器内部电路导通,即可判断是否有障碍物。障碍物没有限制,任何可以遮挡和反射光的物体都能够检测到。模块内部包括两个部分,一部分是光发射电路,一部分是光接收电路,如果接收电路接收不到发射电路的光,则接收电路断开,接收不到是因为传感器前有障碍物,此时就可以判断障碍物的存在。此传感器在很多报警器或者工业计数方面应用很多。传感器将发射电路的光信号,通过接收电路转换为电信号,实现障碍物有无的判断。因为传感器的发射与接收部分是隔离的,通过光信号进行传递,所以具有电气隔离作用,传感器在很多产品中得到应用。利用集成电路以及SMT组装的传感器,稳定性强、运动可靠等特点。
方案选择:系统需要完成距离检测,方案一可以检测出距离的数据,而方案二只能检测出有障碍物,并不能得到具体数据值,所以选择方案一。
2.3 显示方案选择
方案一:数码管内部是发光二极管,由于发光二极管有正负极之分,所以数码管分为共阳数码管、共阴数码管,数码管内部每一个发光二极管都需要单独控制亮灭,可以控制发光二极管的阴极,也可以控制发光二极管的阴极,所以就形成了两种数码管内部结构。如果是共阳数码管,说明数码管的每一段是通过阴极控制的,如果当前段选是低电平,则数码管此段亮,反之,如果当前段选是高电平,则数码管此段灭,共阳接口一直接高电平。如果是共阴数码管,说明数码管的每一段是通过阳极控制的,如果当前段选是高电平,则数码管此段亮,反之,如果当前段选是低电平,则数码管此段灭,共阴接口一直接低电平。数码管是一种可以显示0到9数字的电子元器件,不同领域的人对数码管的称呼不用,但是原理都是一样的。数码管有7段数码管、8段数码管,8段数码管可以多显示一个小数点,数码管内部是由发光二极管构成的,每一个发光二极管为一段,所以7段数码管内部有7个发光二极管,8段数码管内部有8个发光二极管,由于内部都是发光二极管,所以数码管的颜色也都是由发光二极管的颜色决定的。
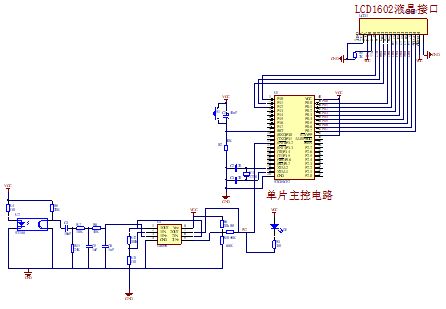
方案二:LCD1602是一种液晶显示屏,应用非常广,液晶屏显示原理是利用电压的变化去充满液晶屏内部两块板之间的材料中,实现对光的控制,这样就可以达到深浅的功能,有了这个功能就能实现很多不一样的图案。由于大部分开发者起初都会通过这款液晶屏进行学习,所以都具备对此款液晶屏的操作使用能力,进而被使用很多。开发者前期都经历过初学阶段,而初学者也都要学习使用这款液晶屏,是一个比不可少的实验,所以几乎所有的开发者都是很熟悉这款产品,而且可以进行开发应用。液晶设计了两行点阵屏,一行点阵有16个显示数据的宽度,缺点是无法输入中文,但是字符基本都可以显示,所以应用较广泛,而且显示控制很容易,因为液晶内部集成有字符库的芯片,不需要自己打点显示,只要输入想要显示的内容,并且以字符或者字符串的形式都可以显示完成。
方案选择:选择LCD1602。该模块显示的内容多种多样,并且非常简单明了,价格合理,对于本设计而言,非常适用。虽然接口线连接的比较多,后期对整个电路进行测试时,就会非常容易得到测试结果。
2.4 语音播报方案选择
方案一:为了实现报警功能,选择蜂鸣器完成此功能。很多的产品以及设备中不仅仅有显示功能还必须设计声音功能,最为普遍的使用期间就是蜂鸣器。有源蜂鸣器相比一般的蜂鸣器而言,最大的优势就是,为蜂鸣器输入要求的电压后就能够使蜂鸣器发出一定频率的声音,因此单片机控制起来更加方便。所以,有源蜂鸣器的只需要高低电平就能够进行控制,和发光二极管的控制原理是一样的。而无源蜂鸣器需要输出特定的PWM波,控制起来软件上较为复杂。所以选择有源蜂鸣器完成报警功能。
方案二:WT588D是一款中文语音集成芯片,由北京的一家企业开发而成,此芯片于2011年设计完成,芯片的成本也适中,语音播报效果非常准备。芯片的控制可以通过单片机的串口进行控制。芯片对语音合成以及智能语音播报的处理非常精准,所以芯片在很多对语音处理要求比较高的产品中进行使用。此芯片推动了语音播报领域的进一步技术的提升。芯片的封装为SSOP28L,芯片支持很多种格式的文本。芯片能够合成中文语音,设计了智能文本处理技术,能够准备的识别数字、时间数据等信息。芯片支持多条指令控制,在不使用的情况下,可以进入休眠状态,这样可以降低,单片机对芯片的串行通信的波特率可以进行设置。此芯片应用于自助机、移动设备、智能仪表、玩具等众多产品中。
方案三:MY1690是深圳市一家公司自主研发的一款小巧的微集成模块,可以外接U盘或USB数据线连接电脑,从电脑下载音频。MY1690可以直接驱动3W的喇叭,还可以直接读取内存卡,使用灵活且方便,所以该芯片广泛应用于收费站、停车场和车内语音提示等智能交通设备。
方案选择:系统需要实现语音播报的功能,方案一只能实现声音提示,不能进行语音播报,方案二和方案三可以实现语音播报,是专用的语音播报芯片,但是方案二如果操作不当会烧毁芯片,而且方案三使用更加方便,所以选择方案三。
2.5 电源方案选择
方案一:USB已从供电有限的数据接口,发展为带有一个数据接口功能的重要供电部件。USB总线可提供4.4V至5.25V的电压,USB供电时,USB电压减去正向偏置电压仍高于设置的输出电压,只要输出电压保持在3.4V以上,USB总线就为负载供电,并激活电流源为电池充电。并且用USB会更加便捷,在任何时间地点都可以用USB充电的方式来供电。只是USB供电的范围小,不适用为一些电容量大的器件供电。
方案二:锂离子电池供电,锂离子电池允许充电的电压范围是每节电池2.5V-4.2V,如果电池电压超出允许的范围,则禁止充电。锂离子电池供电的安全电压下限为2.4V,在低于2.4V条件下继续供电将对电池造成永久性的损坏。电池进行持续供电时,电池电压会不断降低,当电压低于过供电保护电压即2.4V时,应当关闭电池供电回路,禁止其对外继续供电,避免电池损坏。当电池供电电流过大,超出其额定功率,电池会产生较高的热量,致使本身温度过高,有爆炸的危险。
方案选择:本系统需要供电的范围正好在USB的供电范围之内,而锂离子电池供电范围小,不适用于本系统,而且有一定的危险性,所以选择方案一,用USB供电方式。
2.6 按键方案选择
方案一:独立式按键,每个独立式按键都匹配一条输入线,接入主控系统的I/O管理。这种按键具有硬件与软件相对简单的特点,是直接由I/O线组成的单个按键,一个按键占用一个单独的I/O口。这种按键的缺点是每个独立按键都需要一个I/O口,毕竟单片机系统的I/O口有限,当需要的按键数量较多时,对单片机系统的消耗大,所以这种独立式按键只适用于按键少的系统。
方案二:矩阵式按键,矩阵式按键是单片机外部设备中所使用的排布类似于矩阵的键盘,由行线和列线组成,按钮位于行线和列线的交叉点处。当系统需要的按键较多时,这种矩阵式按键可以节省很多I/O口从而提高I/O口的利用率,适用于需要八个以上按键的系统使用。但是这种矩阵式按键的软件编程较为复杂,识别也要相对复杂一些。
方案选择:本设计需要的按键较少,不需要复杂的按键,所以选用方案一独立式按键。
2.7 系统整体的设计方案
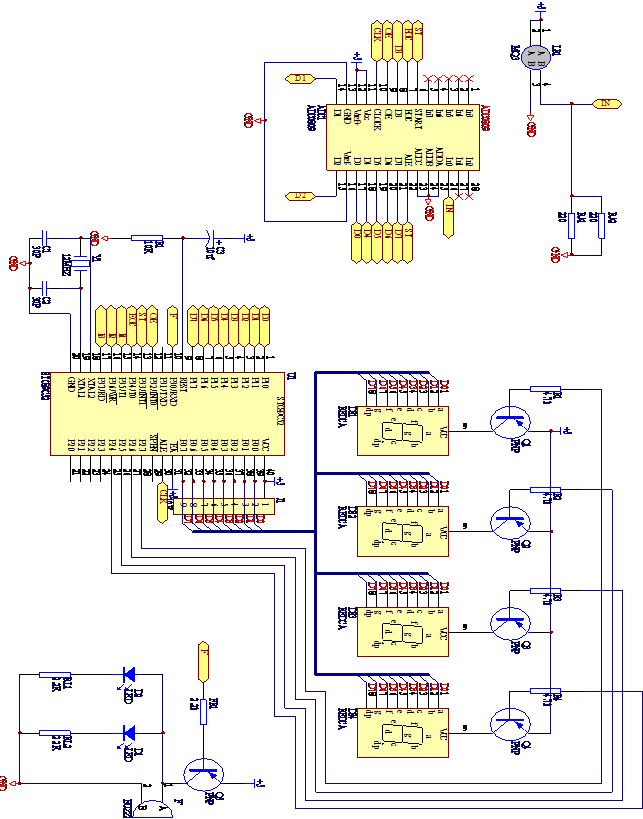
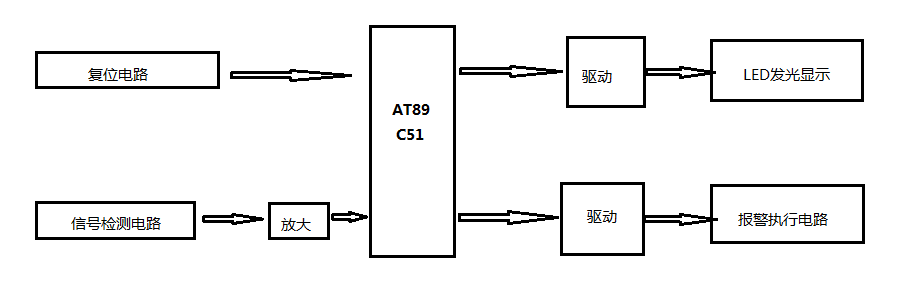
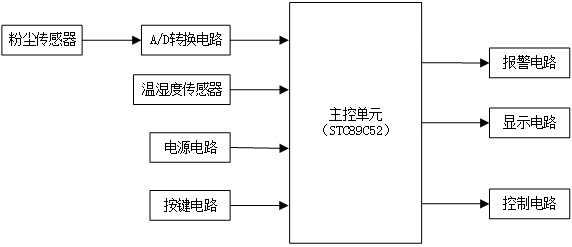
此研究是基于单片机的防汽车追尾碰撞报警系统,整个功能包括汽车到障碍物的距离检测功能、时钟电路、复位电路、显示功能、报警功能以及单片机。各个部分之间的信号传递关系,信号走向,最终都要经过核心的单片机,单片机接收其他部分输入的信号,判断信号的状态,按照信号状态结果,单片机输出控制信号,控制信号决定被控制端的运行状态。系统实时获取汽车到障碍物的距离数据,液晶实时显示距离数据,如果检测到汽车距离后车的距离小于系统设置的距离报警值,则进行语音报警,并且可以进行语音播报距离数据。
摘 要
防汽车追尾碰撞报警系统的蜂鸣器报警可以使司机知道前车或障碍物的存在,但是它不能确定汽车与前车障碍物相差的距离是多少。因此,语音播报对司机非常有帮助。基于这一问题,本文设计了一款具有语音播报功能的防追尾碰撞报警系统。
该系统的实现是以单片机STC89C52为主控芯片,还包括距离检测模块HC-SR04、时钟模块、复位模块、显示模块LCD1602、报警模块MY1690等。单片机主要接收其他模块输入的信号,判断信号的状态,按照判断信号状态的结果,使单片机输出控制信号,从而决定被控制端的运行状态。超声波模块可以使系统实时的获取汽车到障碍物的距离数据和相对速度。当测得相对距离大于阈值时,系统处于正常状态,绿灯闪烁,并且语音播报此时的安全距离;当测得相对距离小于阈值且相对速度小于等于0时,系统呈预警状态,黄灯闪烁,并且语音播报此时的预警距离;当测得相对距离小于阈值且相对速度大于0时,系统呈报警状态,红灯闪烁,并且语音播报此时的报警距离。完成程序文件的执行和制作好实物后,经过系统的调试即可实现本设计的基本功能。
关键词:超声波;液晶显示;语言播报
目 录
第1章 绪论 1
1.1 研究背景及意义 1
1.2 国内外研究现状 2
1.2.1 国内研究状况 2
1.2.2 国外研究状况 2
1.3 论文的章节安排 3
第2章 总体方案设计 4
2.1 设计任务 4
2.2 设计思路 4
2.3 方案选择 4
2.3.1 主控制器方案选择 4
2.3.2 距离检测方案选择 5
2.3.3 显示方案选择 6
2.3.4 语音播报方案选择 7
2.3.5 电源方案选择 8
2.3.6 按键方案选择 8
2.4 系统整体方案设计 9
2.5 本章小结 9
第3章 系统硬件设计 10
3.1 单片机最小系统电路 10
3.1.1 单片机芯片电路 10
3.1.2 时钟电路 12
3.1.3 复位电路 12
3.2 电源电路 13
3.3 外围模块电路设计 13
3.3.1 距离检测电路 13
3.3.2 显示电路 14
3.3.3 语音播报电路 15
3.3.4 按键电路 16
3.3.5 报警电路 16
3.4 系统整体电路图 13
3.5 本章小结 17
第4章 系统软件设计 19
4.1 系统主流程图设计 19
4.2 超声波软件设计 21
4.3 按键软件设计 23
4.4 显示软件设计 29
4.5 报警软件设计 29
4.6 语音播报软件设计 29
4.7 本章小结 24
第5章 系统的调试 25
5.1 软件程序下载 25
5.2 各模块的组装和焊接 26
5.3 实物的检测与调试 27
5.4 本章小结 29
结论 30
参考文献 29
致谢 29
附录A 中文翻译 33
附录B 外文原文 40
附录C 程序代码 49
附录D 图纸 63
第1章 绪论
1.1 研究背景及意义
最近这些年以来,随着我国社会的不断发展,科技也在不停地进步,同时汽车工业也在不断进步,导致汽车增加的数量越来越多。十年前,汽车占所有车辆的比例为33.3%,如今这个数字已经增长到了58.5%[1]。所以公路交通运输已经开始向高密度的方向发展,这就难免会导致一些交通事故的发生,让人们的安全得不到保障。交通事故的主要原因就是车辆之间发生追尾碰撞,所以人们在寻求各种方法来降低行车的危险,使自己的生命安全得到最基本的保障。
之前,人们把主要都防护措施都被动的集中在汽车自身安全方面,用来减轻发生车祸的时候给人们带来的伤害。例如,在汽车的车身上安装一些保险杠、在车内安装安全带和安全气囊等[2]。然而,所有的这些的安全保护措施,并不能减轻发生车祸时给人带来的危害,也不能从根本上解决汽车在行驶过程中发生追尾碰撞的问题。为了避免车祸的发生,必须要主动的去提高和预防汽车的安全状态,使司机提前预知自车与障碍物之间的距离是多少,这样就会极大程度的提升汽车在行驶过程中的安全保障,从而减少车祸等一些事故的发生,保护司机和乘客的安全。该功能的实现,对单片机进入生活有了更好地诠释,电子产品正在不断地改善人们的生活状态,让人们的工作和生活更加有效率,并且可以更加完善地帮助人们解决工作上的问题[3]。
研究防汽车追尾碰撞的技术,对提高汽车自动化水平有重要意义。本毕业设计就是要完成基于单片机的防追尾碰撞报警系统的设计,以及本毕业设计的论文写作。交通事故会给每个家庭都造成了不应该有的经济和精神损失,这样就使得人们在行车的过程中,都紧绷着神经,并且一直处于提心吊胆的状态,反而更容易出现车祸。所以,要想减少事故的发生,必须尽快的研究出防汽车追尾碰撞的技术,得在车辆的防护上花充足的时间,来降低行车过程中潜在的危险,以保证司机和乘客的安全,把发生车辆追尾碰撞的概率降到最低。
测距的方式主要包括激光测距和超声波测距。激光测距制作难度比较大,且缺乏良好的抗干扰能力。相反,超声波则具有良好的方向性、抗光磁干扰能力,还不受空气能见度的影响[4]。所以,要充分利用超声波测距技术,实时检测自车与障碍物的距离,及时的提醒司机,使司机提前预知潜在的危险,就能把各种汽车撞车事故的概率降到最低,让司机安心驾驶,真正的做到司机和乘客一直处在安全状态,减少每个家庭的损失。
1.2 国内外研究现状
1.2.1 国内研究状况
随着我国电子技术不断的发展,研究出了多种测距的方法,其中研究超声波测距的技术难度较低,并且具有花费少的特点,在许多的测量领域得到广泛的应用。而且这种超声波测距做出的系统便宜耐用,而且可以达到汽车电子系统自动化的发展需求。
郭清利用超声波对障碍物的检测,当超声波接收端接收到反射波时说明该方向上有障碍物,从而实现自动转向的功能,以避开前进方向上的障碍物[5]。利用超声波检测是一种实用的非接触测量方法,该系统主要由STC89C52单片机最小系统、超声波发射电路和超声波检测接收电路、温度补偿电路及显示电路组成,根据波的反射原理,利用检测声波发出到接收被测物反射回波的时间来测量距离。
王心越,董峰威,谢璐阳等人设计了一种基于360°激光雷达的汽车防撞预警系统,对汽车周围环境分别建立了防撞模型[6]。利用DBSCAN算法实现了点云聚类,并设计了基于ARM单片机的声光报警系统。通过实验测试验证本系统不仅能够及时检测到前后方车辆信息进行提醒,同时可以检测到侧面的车辆信息,进一步提升了汽车的主动安全性,是一种全新有效的汽车主动防撞系统。
我国在测距传感器方面,测距雷达所涉及的关键技术总的来说已经成熟,但是要做到使它适应车上的工作环境,以及提高稳定性、抗干扰能力和目标识别能力等是关键。只有建立合理的安全车距模型,适应不同的驾驶员的要求,才能使每个驾驶员更加熟练地使用超声波测距的功能。目前大多数有关的研究还没有涉及到如何解决路线预测的问题,这就限制了很多实际中所要应用的功能。所以,开发研究的防汽车追尾碰撞报警系统,必须要能够实时获取道路或者其它车辆的信息,以达到能及时提醒驾驶员采取措施的要求,从而避免危险情况的发生[7]。一旦这一问题得到解决,那么我国的防撞技术会得到长足的进步。
1.2.2 国外研究状况
在上个世纪六十年代,国外一些先进的西方的国家最先开始研究汽车防撞领域[8]。由于当时的技术不够先进,而且硬件的成本比较高,所以做出来的防撞报警器比较笨重、复杂,而且价格昂贵。因而这种报警器得不到大多数人的使用。
当时国外的戴姆勒克莱斯勒公司和沃尔沃公司做的汽车防撞器最为先进。戴姆勒克莱斯勒公司的汽车防撞器的结构主要是两个测距仪和一个影像系统,能够测出安全距离,如果发现车前有障碍物,计算机能够自动引发刹车装置[9]。这个系统能够自动测出前方障碍物的速度和距离,使系统能够自动启动刹车装置。而且能够感知车的行驶状态,如果传感器感到车在左右摇摆,或者感到车内的酒精浓度过高,它就能够自动刹车或者自动锁死方向盘。沃尔沃公司则是在汽车上装了夜视仪,夜视仪能够显示前灯照射距离以外的物体,显示车与障碍物的距离,提示司机刹车[10]。戴姆勒克莱斯勒公司以及沃尔沃公司的防撞器也有一些缺点:如果司机想要超车,在超车的过程中,车的自动防撞器就会测出两车的间距小于安全距离,自动防撞器就会自动刹车[11],这时就会导致车辆在行驶的途中发生不可估量的危险,也有可能发生碰撞事故。
1.3 论文的章节安排
基于单片机的防汽车追尾碰撞报警系统的设计过程主要分为以下几个部分:
第1章是绪论,该章节主要介绍本毕业设计的研究背景及意义,和国内外研究现状,以及本毕业论文的章节安排。
第2章是系统总体的方案设计,介绍本设计所要实现的功能以及设计思路,介绍本设计的方案选择,主要有主控制器的方案选择,距离检测方案的选择,显示方案的选择,语音播报方案的选择以及系统整体的设计方案,选出适合任务要求的各个模块的选型。
第3章是系统的硬件设计,包括STC89C52,晶振电路,复位电路,电源电路,距离检测电路,显示电路,语音播报电路和按键电路。硬件的设计是本次毕业设计的主要部分,硬件电路能否实现直接影响后续的设计能否成功,所以硬件电路的实现是后续设计的基础保障。
第4章是系统的软件方案设计,需要根据本设计的任务要求设计出相应的流程图,然后使用编程语言根据流程图一步步的对各项设计要求进行编辑,从而实现各个模块的功能。
第5章是系统的调试,主要是硬件的焊接与调试,焊接时一定要严格遵守焊接的步骤,防止意外的发生。实物要进行上电测试,看是否与本设计的任务要求一致。
参考文献
[1]汤传国.基于单片机的超声波倒车雷达设计[J].汽车实用技术,2018(21):211-213.
[2]李杰.基于单片机的超声波测距报警系统的设计[J].数字技术与应用,2018,36(09):7-8.
[3]李倩.基于单片机的超声波测距系统设计与实现[J].无线互联科技,2018,15(24):36-38.
[4]周晴.基于单片机的超声波测距仪系统设计[J].电脑知识与技术,2018,14(35):216-217.
[5]郭清.基于STC89C52的超声波测距防撞系统设计[J]. 仪表技术与传感器,2011(06):74-77.
[6]王心越,董锋威,谢璐阳,苏珊珊,王宇歌,赵奉奎. 基于激光雷达汽车防撞预警系统的设计与实现[J]. 智能计算机与应用,2019,9(06):283-285+291.
[7]高美蓉.基于单片机的超声波测距报警系统的设计与仿真[J].国外电子测量技术,2018,37(07):107-111.
[8]谢鹏辉,岳全胜,余世贤,王链珲,王洋.基于MSP430单片机的超声波测距系统设计[J].电子技术与软件工程,2018(08):252-253.
[9]胡林林,付龙.基于AT89C51单片机的超声波测距设计[J].仪表技术,2018(02):33-35.
[10]季江飞,黎云飞,张逸聪,洪星琦,李永.基于蓝牙的超声波测距系统的设计与实现[J].福建电脑,2018,34(01):24-25.
[11]黄军玲.基于单片机的超声波测距报警装置设计[J].电子测试,2017(18):7-8+6.
[12]张伟伟,夏小建,李红星.基于AT89C51单片机的超声波倒车测距仪设计[J].科技经济导刊,2017(25):1-2.
[13]徐江维,李菲.基于单片机的的超声波测距仪[J].电子世界,2017(09):108.
[14]梁东云.基于单片机的超声波倒车雷达系统的设计[J].商洛学院学报,2017,31(02):10-12+96.
[15]苑广会,苑广展,李凯.基于单片机的超声波测距系统设计[J].云南水力发电,2017,33(02):115-117.
[16]高奥.基于单片机的超声波测距及远近光灯自动转化系统[J].科技创新与应用,2017(09)83.
[17]张可儿.基于单片机的超声波测距仪设计[J].自动化与仪器仪表,2017(01):62-63+66.
[18]杨飞,郑要权.基于51单片机的超声波测距仪之倒车雷达设计[J].内蒙古科技与经济,2016(22):95-96.
[19]付雪健,孟俊焕.基于51单片机超声波测距仪倒车雷达报警装置设计[J].内蒙古科技与经济,2016(21):93-94+96.
[20]彭金晶,邹华军.单片机超声波测距器的设计与实现[J].信息通信,2016(09):110-112.
[21]邢锋.最小单片机系统的超声波测距的设计[J].信息化建设,2016(07):312.
[22]彭跃磊,宋东亚.基于单片机的超声波测距仪设计[J].电子制作,2016(13):63+65.
[23]杨道平,简岩.基于单片机的超声波测距系统设计[J].无线互联科技,2016(11):70-71.
[24]X. Chen, W. Guo,A. N. Skiba. Embedded and Embedded Subgroups of Finite Groups[J]. Algebra and Logic, 2015, 54(3).
[25]Kashif Naseer Qureshi, Abdul Hanan Abdullah, Ayman Altameem. Road Aware Geographical Routing Protocol Coupled with Distance, Direction and Traffic Density Metrics for Urban Vehicular Ad Hoc Networks [J]. Wireless Personal Communications, 2017, 92(3).