














苏ICP备112451047180号-6
IRB2400工业机器人关节部位三维造型及法兰零件的数控加工工艺与编程设计
一、选题简介、意义
数控加工与编程是一门实际意义、技术意义和综合意义都十分强大的技术,要求不仅掌握编程指令代码,而且还应具备必要的机械制图基础、机械加工常识和UG三维造型能力。学会在生产中正确选择零件表面的数控加工方法和数控加工工艺设计方案;正确地选择和使用数控机床刀具、夹具。本次设计是运用数控加工工艺、数控编程和UG软件,使自己对工业机器人有着更加充分的理解。培养我们结合实际,独立分析、发现和解决问题的能力。
二、课题综述(课题研究,主要研究的内容,要解决的问题,预期目标,研究步骤、方法及措施等)
课题研究:IRB2400工业机器人三维造型、数控加工工艺、数控编程
主要研究内容:工业机器人三维造型以及加工工艺的分析,参考机械设计资料并根据所学的知识,确定零件的表达方案;设计、拟定出合理的加工工艺方案并完成相应的工艺卡片及设计说明书,编制零件数控加工程序。
要解决的问题:加工工艺方案的制定,用UG软件画出三维造型并组合整个造型
预期目标:1. 查找资料,填写开题报告
2. 完成毕业论文绪论部分的书写
3. 熟悉UGNX9.0软件,绘制三维图及装配图
4.仔细研究图纸,确定尺寸及要求编制加工工艺
5.关键零件的手动及自动编程,机电运动仿真
6. 论文书写、整理、修改,准备答辩
研究步骤:(1)参阅运用机械制造工艺学中的基本知识和理论,结合生产实习中的实践知识,分析零件图样,选择适合在数控机床上加工的零件,确定数控加工内容 (2)零件的三维造型;(3)制定数控加工工艺方案,设计数控加工工艺路线 ;(4)具体的进行工序设计;(5)刀具、夹具、量具的选择和设计;(6)对被加工零件图样进行工艺分析,明确零件图形的数学处理以及编程尺寸的确定;
(7)熟悉编程指令编写数控加工程序,程序的校验与修改。
研究方法及措施:通过查找相关资料、书籍以及观看相关视频,学习UG软件,编写程序并整理成文,以完成整个毕业设计。
三、设计(论文)体系、结构(大纲)
随着机器人技术的进步,工业机器人的设计、使用性能也随着改变,以工业机器人IRB2400为例分析,对其中几个方面的重点研究。
第一章绪论主要介绍课题研究的意义和主要内容。
第二章工业机器人的三维造型与装配,机电运动仿真
第三章工业机器人法兰盘零部件数控加工工艺规程的设计
第四章工业机器人法兰盘零件数控编程。
第五章总结及致谢。
本篇论文我们主要通过研究工业机器人零件数控加工工艺规程,使用UG软件作为三维造型的工具,使得机器人更为立体的表现出来。比较一般工业机器人与其不同的功用性,最后对自己的工作做出总结。
目录
第一章 工业机器人IRB2400简介 3
1.1 ABB工业机器人IRB2400简介 4
1.2 ABB工业机器人IRB 2400技术参数 4
1.3 课题研究的主要内容 5
第二章 工业机器人IRB2400零部件的三维造型与运动仿真 7
2.1 UG NX9.0软件使用方法介绍 7
2.2 零部件的三维图绘制 9
2.2.1 以支撑杆为例子的三维建模 9
2.2.2 其他机器人零部件的三维造型 21
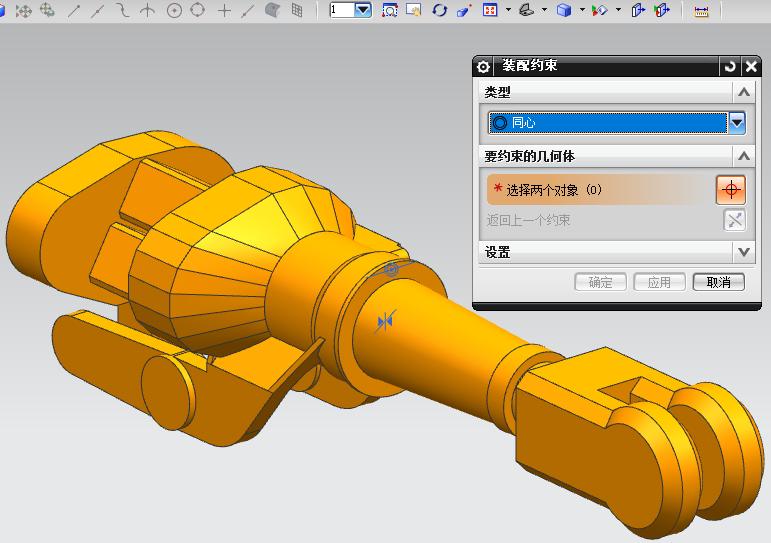
2.3 ABBIRB2400零部件的装配 23
2.4 基于UG9.0的运动仿真 25
第三章 工业机器人法兰盘零件数控加工编程及加工工艺的设计 33
3.1 法兰盘零件尺寸 33
3.2 法兰盘零件结构工艺分析 34
3.3 毛坯种类、形状、尺寸的确定 34
3.4 加工顺序的确定及刀具选择 35
3.4.1 加工顺序的安排 35
3.4.2 刀具的选用 35
3.5 法兰盘走刀路线的确定及加工工艺路线的确定 35
3.5.1 走刀路线的初步规划 35
3.5.2加工工艺路线的确定 35
第四章 工业机器人法兰盘零件数控编程 37
4.1 使用UG的自动编程 37
4.1.1 进入UGNX9.0加工模块 37
4.1.2 创建加工刀具 37
4.1.3 新建加工程序 38
4.1.4 创建几何体与毛坯 39
4.1.5 生成刀路轨迹 41
4.2 手工编程 43
4.2.1 加工工艺及走刀路线 43
4.2.2 程序编制 44
第五章 总结与致谢 46
5.1 总结 46
5.2 致谢 46
参考文献 47
参考文献
[1]戚耀楠,UGNX8.0运动仿真速成宝典[M].电子工业出版社,2015.7
[2]李慧、马正先,工业机器人及零部件结构设计[M].化学工业出版社,2016.11
[3]李俊文、钟奇,工业机器人基础[M].华南理工出版社,2016.10
[4]王保军、滕少峰,工业机器人基础[M].华中科技大学大学出版社,2015.8
[5]张超、张继媛,ABB工业机器人现场编程[M].机械工业出版社,2016.5
[6] 吴京霞,典型零件数控加工[M].北京航空航天大学出版社,2012.8
[7]丁锋、杨民强,UGNX10.0运动仿真与分析教程 [M].机械工业出版社,2015.9
[8]展迪优,UG NX 9.0快速入门教程[M].机械工业出版社,2012.1
[9]顾京,数控机床加工程序编制[M].机械工业出版社,2015.7