














苏ICP备112451047180号-6
四自由度送料机械手臂设计及其运动仿真
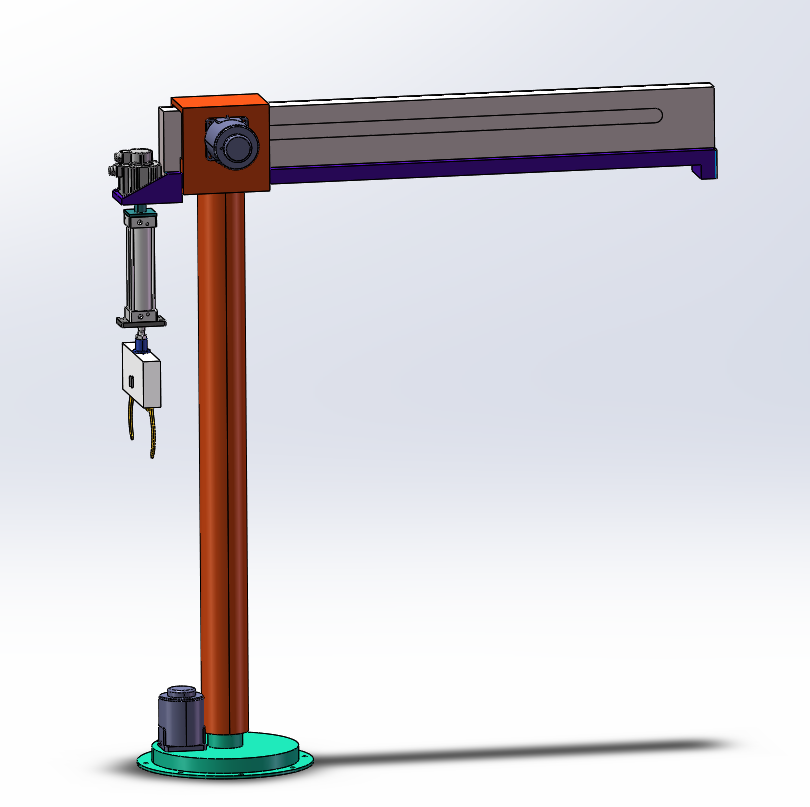
摘要:本课题设计了一种四自由度送料机械手臂,其结构为底部是转盘结构,转盘结构上面连接着一个立柱,立柱与水平的伸缩臂相连接,伸缩臂顶端连接这可以上下运动的小臂,小臂的末端是手爪机构。四自由度机械手臂工作方式特点是,通过底盘电机的驱动,使立柱旋转转动,最大可转动180度,水平臂上电机来驱动齿轮齿条啮合传动,使机械手爪运动到需要搬运物料的正上方,小臂的伸缩气缸和手爪来抓取,再返回原路线到放物料地点,完成一系列的搬运动作。总体方案采用的是电机、机械等传动方式,然后确定一些关键参数,计算选择电机,重点对水平伸缩臂传动轴进行了受力分析,并受力校核,最后对手部和气缸等机构进行了详细计算。由PLC系统控制,可自动控制,让人们不在恶劣环境中工作。在总体方案和个零件的参数确定后应用CREO软件对个零件建模和运动仿真,进行了仿真运动过程展现。
关键词:机械手;送料;四自由度
目录
中文摘要 1
英文摘要 2
1 概述 3
1.1 引言 3
1.2 送料机械手臂的研究现状四自由度送料 3
1.3 送料机械手臂的发展趋势 5
1.4 四自由度送料机械手臂的优势 5
1.5 运动仿真的特点 6
1.6 本文的设计内容 6
1.7 本章小结 6
2 四自由度送料机械手的总体方案设计 7
2.1 原始设计要求及设计参数 7
2.2 四自由度送料机械手的结构和功能 7
2.2.1四自由度送料机械手的结构构成 7
2.2.2四自由度送料机械手的功能分析 8
2.3 机械手结构设计方案 10
2.3.1总体结构设计 10
2.3.2自由度与动作设计 10
2.3.3电机类型的选择 10
2.3.4水平臂传动方式 11
2.4 本章小结 12
3 四自由度送料机械手臂的模块设计计算及选型 13
3.1 四自由度送料机械手机构电机选型计算 13
3.1.1底座的设计 13
3.1.2底座电机选型计算 13
3.1.3手臂电机的选型计算 14
3.2 齿轮的计算 14
3.3 轴的计算 16
3.3.1轴的计算 16
3.3.2轴承设计中应考虑到的问题 19
3.3.3轴承的受力校核 19
3.4 手臂机构设计 22
3.5 手爪与气缸结构设计 24
3.6 本章小结 29
4 控制系统的设计 30
4.1 PLC接线图 30
4.2 PLC程序编写 30
4.2.1ITS梯形图和内部自动程序 30
4.2.2手动程序梯形图及程序 32
4.2.3自动程序编写 33
4.3 本章小结 33
5 仿真运动 34
5.1 介绍CREO 34
5.2 创建模型 34
5.3 构建仿真平台 35
5.4 运动仿真分析 35
5.5 本章小结 36
6 结论 37
谢辞 38
参考文献 39
结论
本次毕业设计工作计算设计了一种四自由度送料机械手臂。该机械手臂最大工作半径为1.5m,夹持棒料最大为2.5kg,立柱可180°旋转,手部可360°旋转。本设计采用了模块化设计,完美的平衡了配重和重心,利用模块化设计,使成本降低,采用PLC控制,在送料的过程中可以做到自动化和无人化。利用Creo将机械手臂组合图做运动仿真,可以看到机构运动状态,从而实现提高设计效率。
本次毕设虽完成了说明书和图纸,但只完成四自由度机械手臂的理论设计和重要结构的分析,依然有许多不足之处,如该四自由度机械手臂实际工作效率,机构的实际运动效果和手部与物料的运动状态等都需要实际的验证结果。如果毕业后从事本专业工作,会继续努力不断学习,成为一名真正的设计人员。
参考文献
[1] 李慧娟.搬运机械手设计[J].电气牵引,2015(1):38-55.
[2] 李佳,四自由度送料机械手的设计研究[D].北京.北京邮电大学,2018.
[3] 赵冬.机器视觉技术及其在机械制造自动化中的应用[J].电子技术与软件程,2019(08):125.
[4] 邓康一.气动机械手的结构设计及伺服控制研究[D].西安:西安建筑科技大,2008.
[5] 关慧贞,魏永,刘赞.机械手技术应用[J].控制与检测,2015(2):55-57.
[6] 陈哲,吉熙章.机器人技术基础[M].北京:机械工业出版社,2016.
[7] Gougar H,Cho S,Prabhu V. High performance loading robot design for a tool-delivery system[J].INTERNATIONAL JOURNAL OF PRODUCTION RESEARCH,2002.4(14):3401-3424.
[8] Ahmed Kharidege,Du TingTing,Zhang Yajun.A practical approach for automated polishing system of free-form surface path generation based on industrial arm robot[J]. International Journal of Advanced Manufacturing Technology,2017(93):3921-3934.
[9] 张捍东.郑睿.岑豫皖.机器人技术应用[J].系统仿真学报,2017(4):3-9.
[10] 康金有.机械手臂在机械工程技术领域的应用与分析[J].南方农机,2017(19):50.
[11] 纪名刚,吴立言.机械设计[M].北京:高等教育出版社,2015.
[12] 洪炳熔.五轴机械手臂[J].电子世界,2015(4):4-5.
[13] 刘德铭.黄振高.机械原理[M].长沙:国防科技大学出版社,2015.
[14] 张震.工业机械手臂的设计[J].金属加工(冷加工),2016(5):61-62.
[15] 成大先.机械设计手册.单行本.常用设计资料[M].北京:化学工业出版社,2004.
[16] 陈洪军.液压式四自由度送料机械手臂设计[J].金属加工(冷工),2016:71-73.
[17] 成大先.机械设计手册.单行本.气压传动[M].北京:化学工业出社,2004.
[18] 哈尔滨工业大学理论力学教研室.理论力学[M].北京:高等教育出版社,2016.
[19] 闻邦椿.机械设计手册2-4卷[M].北京:机械工业出版社,2018.