














苏ICP备112451047180号-6
四自由度工业液压机械手结构设计及运动仿真
摘 要
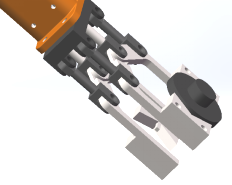
本课题介绍的是为数控车床XCP-45配套而设计的上下料液压机械手,并且能够实现四个自由度。机械手采用液压驱动,并用CAD绘制液压控制系统原理图,通过Solidworks对机械手进行三维建模并运动仿真。使其能将基本的运动更形象的展现在人们面前。它能实现机械手的夹紧、张开、回转、移动等运动。
针对原有数控车床XCP-45的配套上下料机械手存在的问题进行改进,通过采用液压系统的缓冲装置、优化机械手的结构,来改进原来的气动机械手运动不平衡的缺陷,从而减少机械上所存在的缺陷对机械手的影响,使机械手在运动的时候更加平稳。
关键字:液压;机械手;四自由度;Solidworks
目录
摘 要 I
ABSTRACT II
1 机械手设计任务书 1
1.1 机械手概述 1
1.2 机械手设计内容 2
1.3 课题设计要求 3
2 机械手发展现状 4
2.1 机械手国内发展现状 4
2.2 机械手国外发展现状 4
3 机械手的整体设计方案 6
3.1 机械手的坐标型式 6
3.1.1 直角坐标型机械手 6
3.1.2 圆柱坐标式机械手 7
3.1.3 球坐标式机械手 7
3.1.4 关节式机械手 8
3.2 机械手的手爪结构方案设计 9
3.3 机械手的手腕结构设计 9
3.4 机械手的手臂结构设计 9
3.5 机械手的驱动方案设计 9
3.6 机械手的主要技术参数 9
4 抓取结构设计 11
4.1 手爪设计计算 11
4.1.1 手爪的形状和分类 11
4.1.2 设计时应考虑的几个问题 11
4.1.3 驱动力的计算 12
4.1.4 缸筒壁厚的设计 16
4.2 手腕设计计算及校核 16
4.2.1 尺寸设计 17
4.2.2 尺寸校核 17
4.3 手臂升降结构设计 18
5 液压控制系统设计 19
5.1 液压系统简介 19
5.2 液压系统的组成 19
5.2.1 油泵 19
5.2.2 液动机 19
5.2.3 控制调节装置 19
5.3 机械手液压系统的控制回路 20
5.4 压力控制回路 20
5.4.1 调压回路 20
5.4.2 卸荷回路 20
5.4.3 减压回路 21
5.4.4 平衡与锁紧回路 21
5.4.5 油泵出口处接单向阀 21
5.5 速度控制回路 21
5.6 方向控制回路 22
5.7 液压控制系统原理图 22
6 机械手的定位与平稳性设计 23
6.1 常用的定位方式 23
6.2 影响平稳性和定位精度的因素 23
6.3 机械手运动的缓冲装置 24
7 基于Solidworks的机械手运动仿真 25
7.1 机械手的三维建模 25
7.2 机械手的整体装配 25
7.3 机械手的整体渲染 26
7.4 机械手的运动仿真 26
总 结 28
致 谢 29
参考文献 30
附 录 31
参考文献
[1] Henderson harry.Modern Robotics—building versatile machines[M].上海科学技术文献出版社,2008
[2] Crag,j,j.Introduction to Robotic analysis ,system applications [M].机械工业出版社,2004
[3] Fred G.Martin.robotic explorations—a hands-on interdiction to engineering[M].电子工业出版社,2004
[4] 金茂菁. 我国工业机器人发展现状[J].机器人技术与应用, 2001, 01(4)
[5] 蒋刚.工业机器人[M].西南交通大学出版社,2011
[6] 李明.机器人[M].上海科学技术出版社,2012
[7] 刘少丽.浅谈工业机械手设计[J] .广东国防科技师学院,2011
[8] 陈红.气动机械手系统设计[D].长春理工大学,2010
[9] 徐丽春.自动上下料通用机械手系统设计与研究[J].液压与气动,2013 ,(8)83-86
[10] 穆亚飞.浅谈机械手在机械工业中的应用[J].魅力中国,2011(18)
[11] 张广鹏,方英武 ,田忠强.工业机器人整机结构方案的动态性能评价[J].西安理工大学学报, 2004,20(1)
[12] 李晓旭.热压成型机械手的结构优化设计[D].西安工业大学西安工业大学,2010
[13] 常永坤,张胜来.机械基础与液压技术[M].吉林大学出版社,2005
[14] 张桂香.电气控制与PLC应用[M].化学工业出版社,2009
[15] 司建星,夏田,丁丙坤.基于Solidworks装弹机器人的虚拟设计及其运动仿真[J].制造业自动化,2013,35(20)
[16] 徐灏.机械设计手册[M].机械工业出版社,2004
[17] 乔东凯,黄崇林.移动式工业机器人设计的动力学分析[J].茂名学院学报,2003,(3)
[18] 童毅.拉伸机送取料机械手的研究与开发[D].东华大学,2005
[19] 左建民.液压与气压[M].机械工业出版社,2013
[20] 何芹,原政军,姚龙元.用于方形物件装卸液压机械手的设计[J] . 机床与液压,2010,(9):38-40