苏ICP备112451047180号-6
六自由度隔振实验系统设计
摘要
六自由度隔振系统采用六自由度并联机器人的思想构造,因为六自由度并联机器人相对于一般的串联机器人,由于位置误差平均化,故而其运动精度相对较,最大驱动力为所有驱动力的综合,故而其动力性能较好,逆运动学易于解决,力反馈控制容易控制等优点,而且能实现空间 X 轴平移、Y 轴平移、Z 轴平移、绕 X 轴旋转、绕 Y 轴旋转、绕 Z 轴旋转运动,在各个领域的动态模拟试验装置上得到了广泛应用,成为了现代交通工具和机械制造业发展的重要工具,对其相关振动方面研究有重要的意义。因而,本文以目前拥有的单层六自由度平台为设计模板,设计了一种具有双平台的隔振试验系统,其下层采用伺服电液系统为动力输入,对平台输入各种震动波,上层采用伺服电动缸为动力,对下层输入的波动进行减弱,达到上平台不动的效果。本文就结构设计做出了详细的介绍,对其电液伺服系统,伺服液压缸的选择做出来相应计算,对连接的主要部件虎克铰做出了设计校核,绘制出了结构图及相关部件的零件图。
关键词 :六自由度 隔振 结构设计 电液伺服系统 并联机器人
目录
第一章 绪论 1
1.1 课题来源及研究的目的和意义 1
1.1.1 课题来源 1
1.1.2 研究的目的和意义 1
1.2 六自由度隔震平台的结构与特点 1
1.3 国内外研究现 1
1.4 本论文的主要研究内容 2
第二章 六自由度隔震平台的结构设计 4
2.1 基本结构设计 4
2.2 坐标矩阵的确定 6
2.2.1 广义坐标定义 6
2.2.2 坐标变换矩阵 6
2.2 六自由度平台机构位置正解 10
2.3 位置正解数值方法研究 11
第三章 六自由度隔振平台动力系统选择 15
3.1 液压系统基本方程 15
3.1.1 液压缸连续性方程 15
3.1.2 液压缸和负载的力平衡方程 17
3.2 液压缸的选择 17
3.3 电动缸的选择 18
第四章 机械干涉校核 19
4.1 上平台机械干涉校核 19
4.2 下平台机械干涉校核 20
第五章 重要零部件的设计 22
5.1 虎克铰 22
5.2.1 联结轴的校核 22
5.2.2 底座轴的校核 23
第一章 绪论
1.1 课题来源及研究的目的和意义
1.1.1 课题来源
本课题来源于**大学 2017 年毕业设计课题,具体来自于工程实践项目。
1.1.2 研究的目的和意义
由于振动力学环境的控制对仪器设备等保护具有重大意义。卫星发射过程需要隔离火箭传递给卫星的振动起到保护卫星的作用;运输重要精密的科学仪器需要隔离道路的振动等。振动环境是立体空间,6 个自由度均存在振动,有必要对 6 个自由度振动进行隔离。课题对双层 6 自由度隔振系统进行预研,研究其对多自由度平台振动隔振的结果,基于此条件设计双层隔振平台,减小震动,设计出相关的机械结构。
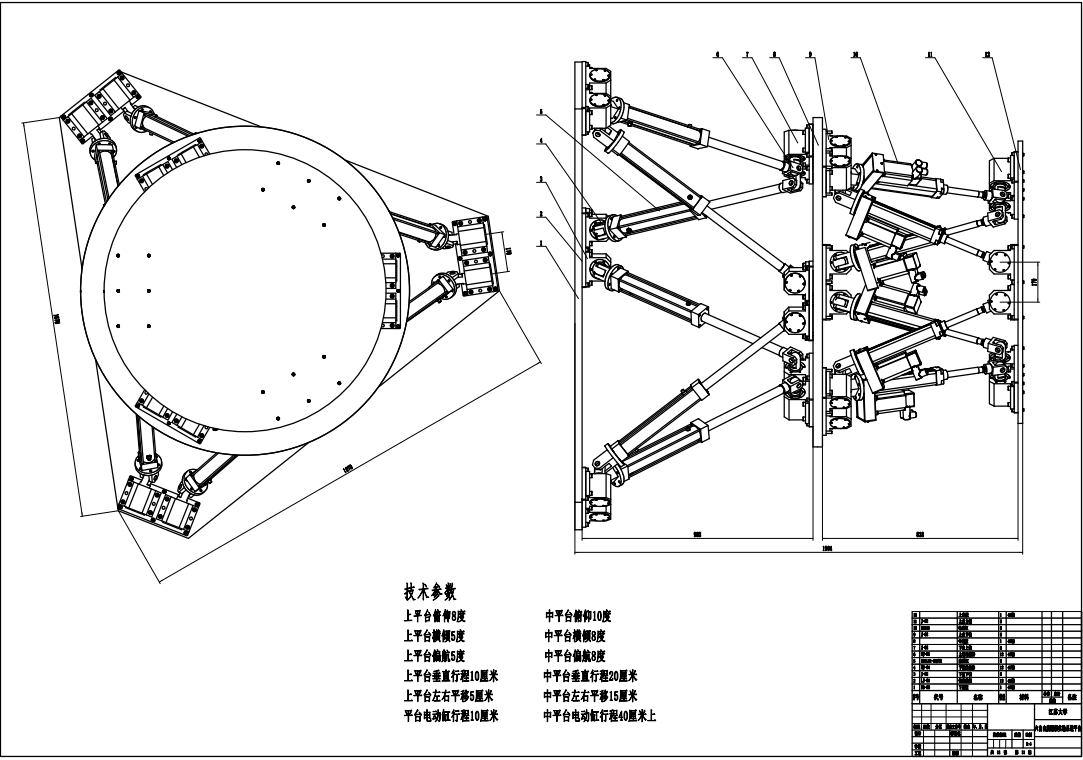
1.2 六自由度隔震平台的结构与特点
隔震平台采用三个平台组成,其中下平台是固定平台,中平台和上平台是可以在空间中具有六个自由度运动的平台,其中下平台和中平台采用虎克铰和伺服液压机构连接,液压缸作为动力机构,中平台和上平台采用虎克铰和伺服电动缸连接,电动缸作为动力机构,实现空间六维运动。
1.3 国内外研究现
作为并联机器人的鼻祖,在 20 世纪 40 年代,Gough 设计出了并联机器人的 Stewart 平台,并把它应用于测量汽车的轮胎。Stewart 于 1965 年颁布了最早的对于并联机器人的文章。1972 年,Minskey 发表了 Manipulator Design Vignettes 这篇文章,他提出将 Stewart 平台用于某些如机床等操作类装置的运动结构而使用。而在这个时候,Stewart 平台现了作为主体的飞行模拟器出现在人们的面前。
自从 19 世纪 90 年代以来,Hunt 提出六自由度并联机器人的构造模型,并联机器人的研究引起了国内外许多著名学者的研究和关注。国外先后有许多的著名学者从事于六自由度平台的研究与应用。与此同时,在我国国内,大学教授黄真于国外参加了关于六自由度平台的学习与研究,并于之后取得了重大的结果。1997 年黄真等人发表了关于六自由度并联机器人的文章,代表我国在六自由度平台的研究中又一个重要进展。到现在为止,已经出现了各种我国的一些著名大学和一些著名的研究所也开始对六自由度并联机器人进行研究与应用,并在此后取得了良好的成果。
1.4 本论文的主要研究内容
课题对双层 6 自由度隔振系统进行预研,对平台振动的隔振效果进行研究模拟计算,基于此条件设计双层隔振平台,减小振动,设计出相关的机械结构,对平台结构进行一定的计算和分析。其下层采用伺服电液系统为动力输入,对平台输入各种震动波,上层采用伺服电动缸为动力,对下层输入的波动进行减弱,达到上平台不动的效果。本文就结构设计做出了详细的介绍,对其电液伺服系统,伺服液压缸的选择做出来相应计算,对连接的主要部件虎克铰做出了设计校核,绘制出了结构图及相关部件的零件图。
参考文献
[1]王宁; 张新敏;基于 MATLAB 的六自由度机器人轨迹规划与仿真宁夏大学机械工程学院分析与探讨 (2014 年 15 期)
[2]林智宏; 曾震宇; 朱钰; 宫瑞,船舶运动仿真平台的设计 自动化技术与应用, 2016 年12 期,
[3]艾青林; 黄伟锋; 张洪涛; 张立彬, 并联机器人刚度与静力学研究现状与进展 力学进展, 2012 年 05 期,
[4] 王英波; 黄其涛; 郑书涛; 韩俊伟; 许宏光,Simulink 和 SimMechanics 环境下并联机器人动力学建模与分析 哈尔滨工程大学学报, 2012 年 01 期, 期刊
[5] 魏明明; 傅卫平; 张海山; 王雯,关节摆角对 6-PSS 并联机器人工作空间的影响 包装工程, 2017 年 03 期
[6] 李晶,六自由度 Stewart 平台运动学遗传神经网络正解 舰船科学技术, 2017 年 04 期,
[7] 刘冬; 张振国; 封继军; 辛利斌; 王顺平,遗传算法在 Delta 机器人刚度优化中的应用
电子科技, 2017 年 02 期
[8] 于海洋,6PUS-UPU 冗余驱动并联机器人模型辨识及力控制算法研究 燕山大学, 硕士
[9] 郑东志; 邓子龙,六自由度并联机器人的位置分析及仿真研究 机械制造与自动化, 2016年 02 期
[10] 赵强阎绍泽;双端虎克铰型六自由度并联机构的动力学模型《清华大学学报(自然科学版)》-2005 年 5 期
[11]许翔鹏; 黄海; 黄舟,基于自适应算法的 Stewart 平台微振动低频激励控制研究 空间控制技术与应用, 2017 年 01 期
[12]李保坤郭永存曹毅六自由度 Gough-Stewart 并联机构的姿态能力《北京工业大学学报》2016 年 5 期
[13]王东炜,Stewart 平台隔振的主动控制研究 哈尔滨工业大学, 硕士 2014-12-01