














��ICP��112451047180��-6
ժҪ
�ڱ����У�������һ�ִ��µĶ��϶��������������ܵ������о��Ŷ���ǰ�����豸�����������Ұ������ڵ綯ЧӦ��ӱ�Ľ���������ܹ��ڽӺϽδ����ߴ���Ť�ء��������֣�˲̬������������������������֮��ķ�����ٶȣ����ڼ��������������ϵͳ����ת�ڲ����Եض�λ�ڸ�װ���е�һЩ���������������������ˣ��������ת�أ��䱻�ӵ����ɴ��������崫�ݵ�ת���ϡ�һ���������ȫ�Ӻϲ���������֮�������ٶ�Ϊ�㣬��綯��ЧӦ��ʧ�����Ҹ�װ��������������һ����������ϵͳͨ�� 3DFEM ģ�ͽ��е������ƣ����Ҹ��豸��������ԭ���Ͼ���ʵ����֤��
�ؼ��ʣ����������� ���� ������� �����������
1.˵��
�������һƪ����[1]�У����ߵ��о�С����ܲ�������һ�ְ�ȫ���ϣ����϶������ �������ͨ��������ϵͳ������������ּ�ڽ�������Ӧ�õ��ŷ������ƶ�ϵͳ����ձõ��ܺĵ���Ŀ����п�����[2,3]������������������ձ�֮�䣬�Ա��ڲ�����Ҫ�����ʱʹ�����롣�������������Ĵ����䣨MR�������������ѡ�����ڱ�������ƾ��������[4,5]���ر�أ��ƶ�ϵͳ�İ�ȫҪ����Ҫ��������ϰ�ȫ�����ö�����ʩ�������غɡ�Ȼ���������ڹ���������Ĵ�����Һ��MRF�����������ڲ��Ż���<0.3Pa·s��ʱ�ĵ�ճ�ȣ����ȷ��������״̬�µĵ�����ʧ�����⣬�����ڴŻ�ʱ�ĸ�����Ӧ����≈70kPa��@200 −1��,�ڽӺ�״̬���ܹ������ߵĿɴ���Ť�ء�������ڴ����������ڴӷǴŻ��ĴŻ�״̬����֮��Ȼ��ͨ��ʱ���ڿ����л�ʱ�䣨<10〜12ms����������Ӧ������������¶���ʱ����ӦҪ��֮�ڡ���[1]�п���������ͨ���ʵ��� 3DFEM ģ�ͽ����˵������ơ����⣬ʵ�����������ר�ò���̨��ִ��һ���������[6]���������ڴ�����Һ������������ڳ��м�ʻ�м�����ձõ����ģ��ﵽ 29�������ڳ����ʻ��������� 46������Ȼ������ԭ��[1]�����൱��[7]��������Ҫȱ���������εĴ���ת�ص�ֵ�����ڷ���ͽӺ�״̬֮��Ļ�е˲̬�����С���ͼ 3��b����ʾ���Ӻ�״̬�µ�Ť�ؼ����������������֮�������ٶȣ�DW���ĺ�����������Ϊ�ڽӺ�״̬�£���ճ����ص�Ť�ط�������ȡ���� DW��ԼΪ�ų����Ť�ط����� 6����
����ƪ�������У������һ���ܹ��˷���ǰ������ԭ�͵���Ҫȱ�ݵĴ������á����豸������ת�ų������ĵ綯ЧӦ��������������������ܡ��ڽӺϣ�˲̬�����ڼ䣬����������ɵļ���ϵͳ����ת�ڵ������������“����”��������Եض�λ�������С�Ȼ����Щ���������Ŵų�֮�������ò������ת�ء����Ť�ؽ������ӵ������崫�ݵ�Ť�أ�������������Ӻϣ��ر����������Σ�����Ҫ�����Ť���Կ˷����ܵľ�Ħ��ʱ��Ȼ�����ڴ�ͳ�Ļ��ڴ����������������У�һ������ﵽ��ͬ���ٶȣ���������˵��ת�أ���ʧ��ת�ش��ݽ��ɴ�����Һȷ�����ڱ����У�������һ�ִ��µĶ��϶��������������ܵ������о��Ŷ���ǰ�����豸�����������Ұ������ڵ綯ЧӦ��ӱ�Ľ���������ܹ��ڽӺϽδ����ߴ���Ť�ء��������֣�˲̬������������������������֮��ķ�����ٶȣ����ڼ��������������ϵͳ����ת�ڲ����Եض�λ�ڸ�װ���е�һЩ���������������������ˣ��������ת�أ��䱻�ӵ����ɴ��������崫�ݵ�ת���ϡ�һ���������ȫ�Ӻϲ���������֮�������ٶ�Ϊ�㣬��綯��ЧӦ��ʧ�����Ҹ�װ��������������һ����������ϵͳͨ�� 3DFEM ģ�ͽ��е������ƣ����Ҹ��豸��������ԭ���Ͼ���ʵ����֤��
�ؼ��ʣ����������� ���� ������� �����������
1.˵��
�������һƪ����[1]�У����ߵ��о�С����ܲ�������һ�ְ�ȫ���ϣ����϶������ �������ͨ��������ϵͳ������������ּ�ڽ�������Ӧ�õ��ŷ������ƶ�ϵͳ����ձõ��ܺĵ���Ŀ����п�����[2,3]������������������ձ�֮�䣬�Ա��ڲ�����Ҫ�����ʱʹ�����롣�������������Ĵ����䣨MR�������������ѡ�����ڱ�������ƾ��������[4,5]���ر�أ��ƶ�ϵͳ�İ�ȫҪ����Ҫ��������ϰ�ȫ�����ö�����ʩ�������غɡ�Ȼ���������ڹ���������Ĵ�����Һ��MRF�����������ڲ��Ż���<0.3Pa·s��ʱ�ĵ�ճ�ȣ����ȷ��������״̬�µĵ�����ʧ�����⣬�����ڴŻ�ʱ�ĸ�����Ӧ����≈70kPa��@200 −1��,�ڽӺ�״̬���ܹ������ߵĿɴ���Ť�ء�������ڴ����������ڴӷǴŻ��ĴŻ�״̬����֮��Ȼ��ͨ��ʱ���ڿ����л�ʱ�䣨<10〜12ms����������Ӧ������������¶���ʱ����ӦҪ��֮�ڡ���[1]�п���������ͨ���ʵ��� 3DFEM ģ�ͽ����˵������ơ����⣬ʵ�����������ר�ò���̨��ִ��һ���������[6]���������ڴ�����Һ������������ڳ��м�ʻ�м�����ձõ����ģ��ﵽ 29�������ڳ����ʻ��������� 46������Ȼ������ԭ��[1]�����൱��[7]��������Ҫȱ���������εĴ���ת�ص�ֵ�����ڷ���ͽӺ�״̬֮��Ļ�е˲̬�����С���ͼ 3��b����ʾ���Ӻ�״̬�µ�Ť�ؼ����������������֮�������ٶȣ�DW���ĺ�����������Ϊ�ڽӺ�״̬�£���ճ����ص�Ť�ط�������ȡ���� DW��ԼΪ�ų����Ť�ط����� 6����
���ĵĽṹ���¡��� 2 ����������ǰ�������豸�������;�� 3 �ڽ����������װ��;�� 4 ���÷������ϳɵ綯��ѧ����Ԫģ��;�� 5 ��������ԭ�ͣ���������ʹ�ú��ʵIJ���̨������ʵ������
2.������ԭ�ͣ���Ҫ˵��
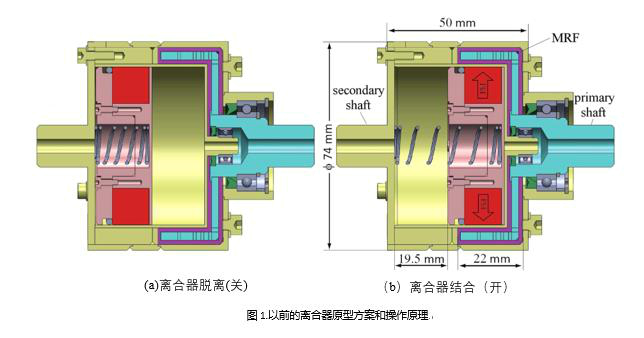
Ϊ�˶��豸���������˽⣬�����µ����ã���ǰ�������豸�����¼��“���豸”����Ϊ�Աȡ�������Σ���[1,8]�б�������ϸ����������ͼ 1 ��ʾ���������������ɣ��������������������˫���μ�϶���Լ����ڿ���ǻ������������������ϵͳ������������ϵͳ����
AISI-1018 �� AISI-316L ���Ϸֱ��������źͷ����Ų���;����LordCorporation[9]�����Ĵ�����Һ 140CG ��ѡΪ������Һ�����ڴų�Դ��ͨ��ʹ��ϡ��NdFeB �п�Բ���壬���ĸ� 90°�ļ������еõ���ߵĴ�����Һ����ˮƽ��������ֱ��������Ż�����ͼ 2 ��ʾ��
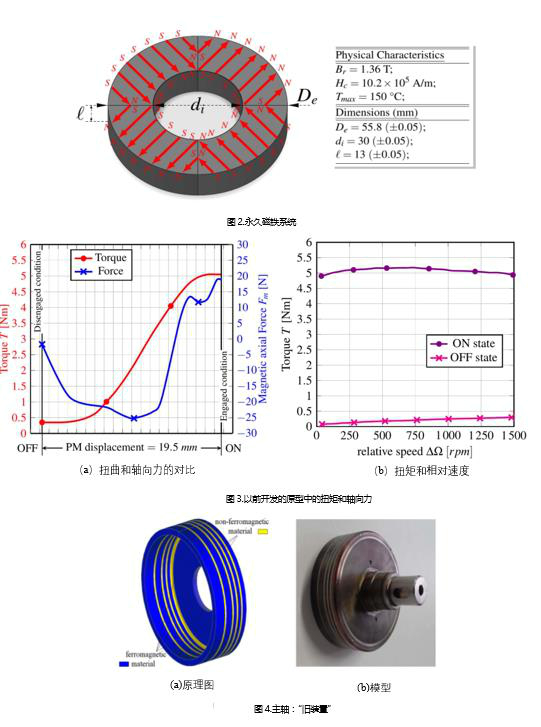
��װ�ù������£�������������ϵͳԶ�������Һ��϶��ͼ 1��a����“OFF ״̬”��ʱ���dz��͵Ĵ������ܶ�ͨ�����塣����������£���Ҫ���ڼ�����ʣ��Ż�ЧӦ����Ĵ���Ť�ؾ��зdz��͵�ֵ��≈0.4 �� 0.5Nm���������������״̬���෴���ڴ� OFF �� ON״̬������������ϵͳ�ƶ��ڼ䣬���Ŵ��������֮��ľ����С��������Һ�ڲ��Ĵų����ӡ�Ȼ������������ϵͳϵͳ����“ON ״̬”��ͼ 1��b����ʱ���ų��ܶ��㹻�ߣ����¸���Ӧ�����Ӷ����¸�ˮƽ�Ŀɴ���Ť�أ�≈5.0Nm�����������֮�䡣Ȼ�������˿ɴ��ݵ�Ť���⣬����ƽ�ҲӦ���Ǵ�������������������������������ϵͳ�����Ų���֮�����Ȼ�����������������������������ܷ�����ٽ�����������ϵͳ�˶��� OFF ״̬�� ON ״̬����֮��Ȼ��ͼ 3��a��ʾ������Ϊ�ӹرյ���ͨ״̬�ļ���ϵͳλ�Ƶĺ����Ŀɴ���Ť�غʹ���������ͼ 3��b��ʾ������Ϊ����ʹ���֮�������ٶ�DW �ĺ����Ŀɴ���Ť�أ����� OFF �� ON ״̬���������
����������¶���ͼ��δʾ���������ڱ�����������ԭ����ϵͳ����Ϊ�����ʺ����ض�Ӧ�õ�ϵͳ����[2,10]����ϸ�������ڿ�/�ؿ��Ʋ����б�֤������Ч�Ϳɿ��Ľ������������ͨ�� O ��Ȧ�ܷ����ǻ�ҷֳ��������ܷ���IJ�������������������ף��佫�����ҵ�ÿ���������ⲿѹ��Դ���ӡ��ý�������Ĺ���ԭ�����£�ͨ��Ԥ���ص���ȷ���ӺϽΣ�������������ϵͳ�� OFF �ƶ��� ON ״̬λ�ã�;����ͨ����������ԵĴ�������ϵIJ�ͬ��ѹ�������������λ�������������������ϵͳϵͳ���ص� OFF λ�õ��ƶ���������Σ��¶�ϵͳ����Ƴ�ʹ�õ�����ʹ���峯�������϶����;���������֤������ϵͳ���ϵ�����µ�����Ż���ȷ�����ϰ�ȫ���������.
3.���豸
����ǰ��װ���У������ɽ�������źͷ���������ɣ���ͼ 4������[1]������������ּ��ǿ�ƴ����ܶ� B ͨ���ڲ����ⲿ������Һ��϶���Ӷ��ڴ��������屾���ڲ����õķֲ���Ȼ����Ϊ�����õ綯��ѧЧӦ��������Ҫ�ӵ�ų��ĽǶȽ�����ȫ������ơ��½��������ʾ��ͼ��ͼ 5 ��ʾ��
�������ౡ�����Ų㣨���Ϊ 0.5mm����ɣ����� 36 ���ۺ����ھ����⾶�ϼӹ��ijݡ�һ���ѵ��������������о�۱�����д�Լ3×107 −1 −1�ĵ���Ͻ�����ͨ����������·�������ַ�ʽ�����Ի��һ��˫“����”��һ��λ���ڼ�϶����뾶������һ����λ�����϶���ڰ뾶�������������������Ч������1�����Ų㣨��Ƭ�����Ը��õؽ��������Һ��϶������Բ�����ֵĴ������ܶ�;��2��˫������������ѭ�������ҿ��Ի�ö����Ť�ء�
����ǰ��װ���У������ɽ�������źͷ���������ɣ���ͼ 4������[1]������������ּ��ǿ�ƴ����ܶ� B ͨ���ڲ����ⲿ������Һ��϶���Ӷ��ڴ��������屾���ڲ����õķֲ���Ȼ����Ϊ�����õ綯��ѧЧӦ��������Ҫ�ӵ�ų��ĽǶȽ�����ȫ������ơ��½��������ʾ��ͼ��ͼ 5 ��ʾ��
�������ౡ�����Ų㣨���Ϊ 0.5mm����ɣ����� 36 ���ۺ����ھ����⾶�ϼӹ��ijݡ�һ���ѵ��������������о�۱�����д�Լ3×107 −1 −1�ĵ���Ͻ�����ͨ����������·�������ַ�ʽ�����Ի��һ��˫“����”��һ��λ���ڼ�϶����뾶������һ����λ�����϶���ڰ뾶�������������������Ч������1�����Ų㣨��Ƭ�����Ը��õؽ��������Һ��϶������Բ�����ֵĴ������ܶ�;��2��˫������������ѭ�������ҿ��Ի�ö����Ť�ء�
��ˣ�����ʱ��װ�����Ӧ�綯��һ������������ͨ���ļ�����������ϵͳ�Ļ�е��ת�����ת�ų�ת�ӡ�ʵ���ϣ��ڻ�����ɽΣ���������������Բ�ͬ���ٶ���תʱ���������ڣ�˫�������ϸ�Ӧ���������е����ʹŸ�Ӧ֮�������ò�����һ�����ת�أ����ڴ�����Һ�ĵ��ת��֮��������������Ӻϡ����������֮�������ٶ�Ϊ�㣨�Ӻ�״̬��ʱ����ͨ��������Һȷ�������Լ���˵ĵ��ת����ʧ��ת�ش��ݡ�������Ľ�������������ܵ��������������Ť�أ��ر����������Σ�����Ҫ�����Ť���Կ˷����ܵľ�Ħ��ʱ��
4.���豸����ֵģ��
ͨ���������� FEM ���� EFFE �� 3D ��̬ģ�����о�������������[11]�����ܹ����Dz��ϵķ����ԣ��������� MR ���壩�����������Ϊ���Լ���������������ϵͳ s Χ���豸����ת���˶�ЧӦ��ͼ 6��a����ʾ�������ṹ�� FE ��������Լ“2.5×106��Ԫ�غͽڵ�”����ͼ 6��b����ʾ����˫��������� FE ģ���е��и
4.1.��̬����
Ϊ�˷��� MR �����ڵĴ������ܶȵ���Ϊ��������һЩ��ֵģ�⣬��������ھ�ֹ״̬�������ʹμ����ٶȹ̶�Ϊ�㣩������������ϵͳ s ���� ON ״̬��ͼ 7 ��ʾ����װ���������д������ܶȴŸ�Ӧǿ�ȵ�ͼ����ͼ 8 �б������¾�װ�õIJ�ͬ��λ֮��ĴŸ�Ӧǿ��֮��ıȽϡ��ر�أ�ͼ 8��a���ͣ�b���ֱ�ʾ���������� a-a’�� b-b’�ĴŸ�Ӧǿ�ȵľ�����������ߣ���ͼ 7 ��ʾ�����෴��ͼ 8��c���ͣ�d����ʾ�����ŷֱ�ͨ���� ce �� ci ���ܳ��ĴŸ�Ӧǿ�ȵ�ģ���ĸſ�����ͼ 7������Ȼ�ݺͲ۵Ĵ���Ӱ���˴������ܶ���Բ�ܷ���ı仯��������������������������Ӵ�����Һ��Բ���β����е�ֵ��
4.2.��̬����
�ڶ�̬�����¶���װ�ý����˵��飬������˫�������������װ�����ܵĹ��ס�����ģ�⣬��ͼ 9 ����ʾ��ƽ���ٶ�����ʩ�ӵ����ᣬͬʱ�����赲�μ�����ˣ��������֮�������ٶ� DW �ڴ�Լ 120ms �ڴ� 0 ת�� 1500rpm��������������ͬ�������н��У���1����϶��û�д�����Һ��װ��;��2����϶�о��д�����Һ���豸��
4.2.1.�ڼ�϶��û�д�����Һ�ĵ��豸����Ȼ�������������ָ�������ʵ�ʲ���������ͨ��ʵ����֤ FEM ģ�Ϳ��������õġ���ʵ�ϣ���װ�ò���������ʱ��������Ħ�������ļ���Ť�ر����ԣ�������������������������ݣ���ţ�ת�ء�ͼ 10��a���ͣ�b����ʾ��˫������������ӳ���ϵ��������ٶ� DW ��ѭͼ 9 ��ʾ�������ļ�ʱ�����ת�غ��豸������������Һ����ΔΩ=1500rpm ʱ�����ת�ص���ֵ̬ԼΪ 0.62Nm��
4.2.2.�ڼ�϶�д��д�����Һ���豸����������ָ�������ʵ�ʲ��������ڴ�����Һ�ŵ��ʴ��ڿ����Ĵŵ��ʣ�������ڼ�϶�еĴ��ڿɸı��ֳ���·��ͨ�������������ṹ�еĴų�����ˣ�Ԥ���ڲ���Ҫ���������»����ӵ��ת�١�ͼ 11��a���ͣ�b����ʾ��˫������������ӳ���ͼ 10 �еĵ��ת��ӳ�䣬���������Һ��ء���Щ��ֵ���������˫����������������������ܹ�������Ч�ĵ��ת�ء����⣬��϶�ڵ�����Ĵ����������Ӹ�Ť�أ����� 1500rpm���ٶ���ԼΪ 0.93Nm����û������������Լ�� 50����
4.���豸����ֵģ��
ͨ���������� FEM ���� EFFE �� 3D ��̬ģ�����о�������������[11]�����ܹ����Dz��ϵķ����ԣ��������� MR ���壩�����������Ϊ���Լ���������������ϵͳ s Χ���豸����ת���˶�ЧӦ��ͼ 6��a����ʾ�������ṹ�� FE ��������Լ“2.5×106��Ԫ�غͽڵ�”����ͼ 6��b����ʾ����˫��������� FE ģ���е��и
4.1.��̬����
Ϊ�˷��� MR �����ڵĴ������ܶȵ���Ϊ��������һЩ��ֵģ�⣬��������ھ�ֹ״̬�������ʹμ����ٶȹ̶�Ϊ�㣩������������ϵͳ s ���� ON ״̬��ͼ 7 ��ʾ����װ���������д������ܶȴŸ�Ӧǿ�ȵ�ͼ����ͼ 8 �б������¾�װ�õIJ�ͬ��λ֮��ĴŸ�Ӧǿ��֮��ıȽϡ��ر�أ�ͼ 8��a���ͣ�b���ֱ�ʾ���������� a-a’�� b-b’�ĴŸ�Ӧǿ�ȵľ�����������ߣ���ͼ 7 ��ʾ�����෴��ͼ 8��c���ͣ�d����ʾ�����ŷֱ�ͨ���� ce �� ci ���ܳ��ĴŸ�Ӧǿ�ȵ�ģ���ĸſ�����ͼ 7������Ȼ�ݺͲ۵Ĵ���Ӱ���˴������ܶ���Բ�ܷ���ı仯��������������������������Ӵ�����Һ��Բ���β����е�ֵ��
4.2.��̬����
�ڶ�̬�����¶���װ�ý����˵��飬������˫�������������װ�����ܵĹ��ס�����ģ�⣬��ͼ 9 ����ʾ��ƽ���ٶ�����ʩ�ӵ����ᣬͬʱ�����赲�μ�����ˣ��������֮�������ٶ� DW �ڴ�Լ 120ms �ڴ� 0 ת�� 1500rpm��������������ͬ�������н��У���1����϶��û�д�����Һ��װ��;��2����϶�о��д�����Һ���豸��
4.2.1.�ڼ�϶��û�д�����Һ�ĵ��豸����Ȼ�������������ָ�������ʵ�ʲ���������ͨ��ʵ����֤ FEM ģ�Ϳ��������õġ���ʵ�ϣ���װ�ò���������ʱ��������Ħ�������ļ���Ť�ر����ԣ�������������������������ݣ���ţ�ת�ء�ͼ 10��a���ͣ�b����ʾ��˫������������ӳ���ϵ��������ٶ� DW ��ѭͼ 9 ��ʾ�������ļ�ʱ�����ת�غ��豸������������Һ����ΔΩ=1500rpm ʱ�����ת�ص���ֵ̬ԼΪ 0.62Nm��
4.2.2.�ڼ�϶�д��д�����Һ���豸����������ָ�������ʵ�ʲ��������ڴ�����Һ�ŵ��ʴ��ڿ����Ĵŵ��ʣ�������ڼ�϶�еĴ��ڿɸı��ֳ���·��ͨ�������������ṹ�еĴų�����ˣ�Ԥ���ڲ���Ҫ���������»����ӵ��ת�١�ͼ 11��a���ͣ�b����ʾ��˫������������ӳ���ͼ 10 �еĵ��ת��ӳ�䣬���������Һ��ء���Щ��ֵ���������˫����������������������ܹ�������Ч�ĵ��ת�ء����⣬��϶�ڵ�����Ĵ����������Ӹ�Ť�أ����� 1500rpm���ٶ���ԼΪ 0.93Nm����û������������Լ�� 50����
5.�������ʵ������
����ֵģ�����Ļ����ϣ������˵綯��/�������������ԭ�͡�ͼ 12��a��-��c���ֱ�ʾ�������Ų㣬����˫�������������װ��ԭ�͡�
Ϊ�˱��������ܣ����ͺ���ר�ò���̨�Ͻ����˲��ԣ���ͼ 13 ��ʾ����Ҫ����ˢ�����ɣ�ͨ�����ʵĽ�ͷ������������������������ͨ��Ť�ؼƣ�STAMOSENS0160DM�������ɴ���Ť�غ�ת�١������¶�ϵͳ�����ܶ����ض�Ӧ�ã�����ִ��������Ϊ������ʵĽ���������μ��� 2 ��ҳ�Ľ�β�����ڱ�����������ʵ������У�������Ӻ�/������ͨ��ʹ�ò�ͬ�Ľ���������ر�أ�ͨ��ʹ��Ԥ���صĵ����� ִ������������ϵͳϵͳ�� OFF �� ON ״̬��������Ӻϣ����ƶ���ͬʱͨ�����²���ȷ�������˶����� ON �� OFF ״̬������������ϵͳϵͳ����������룩�����������ͼ 13��ʾ�����ߵ��˶���ͨ��ʹ�ù̶�������������ϵͳ֧���ϵĵ��ߺͿ��Բ��Ƶ��ߵĻ��ֻ�õġ�Ȼ��ͨ�����Ʋ�������ʵ��ص����������ڵ�����������ϵͳλ�á�����ѡ�������ڲ����ڼ��������¶����������Ŀ��ơ�
������ʵ������У���������ˢ����ʵ��������������ᱻ��еԼ�������赲����ˢ����� PC �����е�ר���������ƣ�ͨ�� USB ��¼����������
��Ϊ��һ����Ϊ����֤��̬ FEM ģ�͵Ŀɿ��ԣ���û�д�����Һ�������ж�������������һЩ����ʵ���������ˢ����Ŀ��Ʒ�ʽ��ʹ������ѭ�������ٶ����ã�“�ٶȿ���”ģʽ����Ȼ���ڽӺ�״̬����ͨ״̬�����е˲�䣨�� OFF ����ͨ״̬����ͬʱ��������������ϵͳ����ϵͳ�������ʵ��ض�λ���Ա������״̬��OFF ״̬���в���������������⣬����ͬ���������е��¾��豸֮����бȽϡ�ͼ 14��a��ʾ��������������� OFF ״̬����û�� MR �����ڼ�϶�н��еIJ����в������ٶȺ�Ť�ء�����������£�������������������Ħ���������ļ���Ť�أ����� 1500rpm ʱ��Լ���� 0.12Nm��
��Ϊ��һ����Ϊ����֤��̬ FEM ģ�͵Ŀɿ��ԣ���û�д�����Һ�������ж�������������һЩ����ʵ���������ˢ����Ŀ��Ʒ�ʽ��ʹ������ѭ�������ٶ����ã�“�ٶȿ���”ģʽ����Ȼ���ڽӺ�״̬����ͨ״̬�����е˲�䣨�� OFF ����ͨ״̬����ͬʱ��������������ϵͳ����ϵͳ�������ʵ��ض�λ���Ա������״̬��OFF ״̬���в���������������⣬����ͬ���������е��¾��豸֮����бȽϡ�ͼ 14��a��ʾ��������������� OFF ״̬����û�� MR �����ڼ�϶�н��еIJ����в������ٶȺ�Ť�ء�����������£�������������������Ħ���������ļ���Ť�أ����� 1500rpm ʱ��Լ���� 0.12Nm��
��ͼ 14��b���У���ʾ�˶�̬ FEM ģ�͵ij�����֤���ڸò����У������������ OFF ״̬ʱ�����ᱻ������ 1500rpm ���ٶȡ�Ȼ����ʱ�� t≈200 �룬����������ϵͳϵͳ�� OFF�ƶ��� ON ״̬��ִ��������Ӻϡ������ t≈250 ���ʱ�䣬����������ϵͳ���ָ����ر�״̬�������������ֱ��ֹͣ���ڽӺ�״̬��ʱ�� t≈200 ��� t≈250 ��֮�䣩ʱ�����ڼ�϶Ϊ�գ�Ť�ؼƲ�����ת���Ǽ����͵��ת�ص��ܺ͡�����������˫�����е������뼤���ų�֮�������������ת�ء���Ť�ص�ƽ��ֵ�� 1500rpm ʱ���µ��� 0.67Nm��
��ˣ���ȥ����ת�أ���ͼ 14��a������ʵ����ת���� 1500rpm ʱ��ƽ��ֵԼΪ 0.56Nm��
���ǵ�ͼ 10��b���б���ķ����������˼���ת�أ�������ĵ��ת�غͲ������ת��֮������ԼΪ 10������������������Ԫģ���ܹ����������Ԥ�̬����������豸��
ͼ 14��b����ʾ���ھ��豸��Ҳ���ڵ��ת�ء���ʵ�ϣ����ɾ�����IJ���Ҳ��������������ͼ 4����������Σ�������Щ���ϵĵ����Ա�˫�����ϵĵ����Եͼ��������Կ��Ժ��Ծ�װ���еĵ��ת�صĹ��ס����⣬Ϊ����֤����Ч�ԣ����п��������������״̬���Ӻ�״̬�Ļ�е
˲��IJ��ԡ���ˢ����ڴ�Լ 150 ���ڽ������ 0 ת�� 1500rpm��Ȼ��ͨ������ϵͳ���ֺ㶨���ٶȡ����ڸ��ᱻ���� �� �� �� ֮ �� �� �� ��ΔΩ=1500rpm��һ���ٶȴﵽ������ֵ���� t=181s������������ϵͳϵͳ�� OFF �ƶ��� ON״̬��Ȼ��Լ 6-7 �����ˢ����رա���ͼ 16 �У���ʾ���ڸò����ڼ��¼���ٶȺ�Ť�ء���ͬһͼ�У��������¾��豸֮��ıȽϡ������������װ�ô��ݵ�Ť�شﵽԼ 6.5Nm ��ֵ����ͨ����װ�ã�≈5.1Nm����õ�Ť�ش� 25��-28���������ٶȣ�������ˢ�綯����“�ٶȿ���”ģʽ�������������ڽӺϽΣ�����ת�ص����ӣ�����Լ 11��-13�����ٶ��´�����Ϊ��Ҫ���ֵ��ע����ǣ�һ��������Ӻϣ�Ť�ص�״̬��ʱ�伸�������½������ǵ��¶ȶԻ��ڴ�����Һ���������Ť�ش������Ե�������֪��Ӱ�죬���Խ�������������ʵ�ϣ���������֮�������ٶ��������豸�ڲ���ɢ�Ĺ��ʣ������Բ�������
���ǵ�ͼ 10��b���б���ķ����������˼���ת�أ�������ĵ��ת�غͲ������ת��֮������ԼΪ 10������������������Ԫģ���ܹ����������Ԥ�̬����������豸��
ͼ 14��b����ʾ���ھ��豸��Ҳ���ڵ��ת�ء���ʵ�ϣ����ɾ�����IJ���Ҳ��������������ͼ 4����������Σ�������Щ���ϵĵ����Ա�˫�����ϵĵ����Եͼ��������Կ��Ժ��Ծ�װ���еĵ��ת�صĹ��ס����⣬Ϊ����֤����Ч�ԣ����п��������������״̬���Ӻ�״̬�Ļ�е
˲��IJ��ԡ���ˢ����ڴ�Լ 150 ���ڽ������ 0 ת�� 1500rpm��Ȼ��ͨ������ϵͳ���ֺ㶨���ٶȡ����ڸ��ᱻ���� �� �� �� ֮ �� �� �� ��ΔΩ=1500rpm��һ���ٶȴﵽ������ֵ���� t=181s������������ϵͳϵͳ�� OFF �ƶ��� ON״̬��Ȼ��Լ 6-7 �����ˢ����رա���ͼ 16 �У���ʾ���ڸò����ڼ��¼���ٶȺ�Ť�ء���ͬһͼ�У��������¾��豸֮��ıȽϡ������������װ�ô��ݵ�Ť�شﵽԼ 6.5Nm ��ֵ����ͨ����װ�ã�≈5.1Nm����õ�Ť�ش� 25��-28���������ٶȣ�������ˢ�綯����“�ٶȿ���”ģʽ�������������ڽӺϽΣ�����ת�ص����ӣ�����Լ 11��-13�����ٶ��´�����Ϊ��Ҫ���ֵ��ע����ǣ�һ��������Ӻϣ�Ť�ص�״̬��ʱ�伸�������½������ǵ��¶ȶԻ��ڴ�����Һ���������Ť�ش������Ե�������֪��Ӱ�죬���Խ�������������ʵ�ϣ���������֮�������ٶ��������豸�ڲ���ɢ�Ĺ��ʣ������Բ�������
����������¶ȣ����ҿ��ܻ���ʧŤ�ء���Ȼ������Ч�������������������ھ�ʽ�������Ϊͻ������Ϊ��˫��������������������ڽ�һ����ߴ�����Һ���¶ȡ�
��“�ٶȿ���”ģʽ�½�����һ���н��е�ʵ����ԣ��Կ�����ˢ�綯�������ֿ������������������ʹμ��������֮��ʩ������ٶ� DW �ĸ�����������Ҳ����������ڵ�����������ϵͳ�IJ�ͬλ�õĿɴ���Ť�ء���Ȼ��Щ�����ڷ������������������װ�ô��ݵ�Ť�صĹ���ʱ�����õģ������Dz��������������ʵ�ʲ�������ʵ�ϣ�Ϊ����֤�豸��ʵ����Ϊ����ˢ�����“ת�ؿ���”ģʽ�������ÿ��ƿ������������IJο�ֵ����ֵ����һ�������ٶȣ�1500rpm������һ������Ť�أ�1Nm���������������ݵ�Ť�ص���Ԥ����ֵ������ˢ����Ը�����б�¼������ᣬ�ﵽ�ٶȲο�ֵ���෴��������ݵ�Ť�س�����������ֵ������ˢ�綯������Ť�ص�ֵ���������ٶȣ����е����һ��������
�ڱ�ʵ������У�ͨ��Ť�ؼƲ�����ת�غͣ���ԣ����ٶȵ�������ͼ 17 ��ʾ��������ĵ�һ�Σ��ӵ� t≈0 �� t≈1.86s�����������������״̬������� 0 ���� �� 1500rpm����������������ϵͳϵͳ���ڹر�״̬������������û�м����������ɺ��ԣ�����+ճ��+����ų�ת�أ�≈0.5Nm���������μ��ᡣ����Щ�����£��������ֱ���ﵽ�������ٶ�ֵ����Ԥ����ֵ��1500rpm����
��ʱ��Ϊ 41.86 �룬Ԥ�ص��ɽ�����������ϵͳ�Ƶ� ON ״̬��ִ��������Ӻϡ��ڻ���˲���ڼ䣨�� 41.86 �뵽 42.4 �룩������ת�������� z �������������ϵͳλ�ƶ����ӣ�����ٶ���Ӧ��С������������£�������������ת��ԼΪ 6.6Nm����Ҫ��������֮��;��һ�������ڴ���������ĴŻ���������ѭͼ 3��a���е���ʾ����綯��ЧӦ��صĵڶ����������˫�����ʹų�֮�������֮�������ò����ġ����ֵ��ת��ֻ���������������֮�������ٶȲ�Ϊ�㣨DW0�����Ļ�е����ʱ�Ŵ��ڡ�����Ϊ�����Ť�������ڶ����Ť�أ���������ͨ������������ļ�����õ�Ť�أ��������ڿ��ܵ������������ӺϾ�Ħ������˷���Ȼ����һ��ϵͳ�ﵽ���еƽ�⣬���ڻ��Ʊ�Ϊ�㣨DW=0��������������ʧ����ͨ��������Һȷ��Ť�ش��ݣ����ڴ�ͳ�Ļ��ڴ������������С�������������û��˫�������������ȣ���е˲̬�����е���Ť������Լ28�������������⣬������Ҫ���и�����ķ��������ǿ��Թ۲쵽�����������ʵ�ʲ����ڼ䣬���������µĹ����ڳ���ʱ��dz��̵Ļ�е˲���ڼ䷢����Լ 0.5s����
��“�ٶȿ���”ģʽ�½�����һ���н��е�ʵ����ԣ��Կ�����ˢ�綯�������ֿ������������������ʹμ��������֮��ʩ������ٶ� DW �ĸ�����������Ҳ����������ڵ�����������ϵͳ�IJ�ͬλ�õĿɴ���Ť�ء���Ȼ��Щ�����ڷ������������������װ�ô��ݵ�Ť�صĹ���ʱ�����õģ������Dz��������������ʵ�ʲ�������ʵ�ϣ�Ϊ����֤�豸��ʵ����Ϊ����ˢ�����“ת�ؿ���”ģʽ�������ÿ��ƿ������������IJο�ֵ����ֵ����һ�������ٶȣ�1500rpm������һ������Ť�أ�1Nm���������������ݵ�Ť�ص���Ԥ����ֵ������ˢ����Ը�����б�¼������ᣬ�ﵽ�ٶȲο�ֵ���෴��������ݵ�Ť�س�����������ֵ������ˢ�綯������Ť�ص�ֵ���������ٶȣ����е����һ��������
�ڱ�ʵ������У�ͨ��Ť�ؼƲ�����ת�غͣ���ԣ����ٶȵ�������ͼ 17 ��ʾ��������ĵ�һ�Σ��ӵ� t≈0 �� t≈1.86s�����������������״̬������� 0 ���� �� 1500rpm����������������ϵͳϵͳ���ڹر�״̬������������û�м����������ɺ��ԣ�����+ճ��+����ų�ת�أ�≈0.5Nm���������μ��ᡣ����Щ�����£��������ֱ���ﵽ�������ٶ�ֵ����Ԥ����ֵ��1500rpm����
��ʱ��Ϊ 41.86 �룬Ԥ�ص��ɽ�����������ϵͳ�Ƶ� ON ״̬��ִ��������Ӻϡ��ڻ���˲���ڼ䣨�� 41.86 �뵽 42.4 �룩������ת�������� z �������������ϵͳλ�ƶ����ӣ�����ٶ���Ӧ��С������������£�������������ת��ԼΪ 6.6Nm����Ҫ��������֮��;��һ�������ڴ���������ĴŻ���������ѭͼ 3��a���е���ʾ����綯��ЧӦ��صĵڶ����������˫�����ʹų�֮�������֮�������ò����ġ����ֵ��ת��ֻ���������������֮�������ٶȲ�Ϊ�㣨DW0�����Ļ�е����ʱ�Ŵ��ڡ�����Ϊ�����Ť�������ڶ����Ť�أ���������ͨ������������ļ�����õ�Ť�أ��������ڿ��ܵ������������ӺϾ�Ħ������˷���Ȼ����һ��ϵͳ�ﵽ���еƽ�⣬���ڻ��Ʊ�Ϊ�㣨DW=0��������������ʧ����ͨ��������Һȷ��Ť�ش��ݣ����ڴ�ͳ�Ļ��ڴ������������С�������������û��˫�������������ȣ���е˲̬�����е���Ť������Լ28�������������⣬������Ҫ���и�����ķ��������ǿ��Թ۲쵽�����������ʵ�ʲ����ڼ䣬���������µĹ����ڳ���ʱ��dz��̵Ļ�е˲���ڼ䷢����Լ 0.5s����
6.����
���˻��ڴ�����Һ�͵綯��ЧӦ�Ĵ��¶��϶������Ĵ�����ƺ�ʵ����������ǻ����������弤���Ĵ�������������������õ綯��ѧЧӦ�����������Լ 28�����ڽӺϣ�˲̬�����ڼ䣬��������������ϵͳ�ļ���ϵͳ����ת��˫����������“����”��������Եض�λ���豸�С�Ȼ����Щ�����ʹų�֮�������ò������ת �ء����Ť�ر��ӵ��ɴŻ����������崫�͵�Ť���ϣ���������������Ӻϣ��ر����������Σ�����Ҫ�����Ť�����˷����ܵľ�Ħ��ʱ��һ������ﵽ��ͬ���ٶȣ���������˵��ת�أ���ʧ��ת�ش��ݽ��ɴ�����Һȷ�������ڴ�ͳ�Ļ��ڴ�����Һ��������С���������������ͨ�� 3D ��̬ FEM ģ����Ƶģ������ڲ�ͬ���������µ�����ͨ����ԭ�͵�ʵ���������֤��
�����
[1] Rizzo R, Musolino A, Bucchi F, Forte P and Frendo F 2015 A multi-gap magnetorheological clutch with permanent magnet Smart Mater. Struct. 24 075012
[2] Bucchi F, Forte P and Frendo F 2014 A fail-safe magnetorheological clutch excited by permanent magnets for the disengagement of automotive auxiliaries J. Intell. Mater. Syst. Struct. 25 2102–14
[3] Armenio G, Bartalesi E, Bucchi F, Ferri A, Frendo F, Forte P, Rizzo R and Squarcini R 2011 Mechanical combustion engine driven fluid pump EPO Patent 11425176.2-2423
[4] Shiao Y and Nguyen Q 2013 Development of a multi-pole magnetorheological brake Smart Mater. Struct. 22 065008
[5] Guo H T and Liao W H 2012 A novel multifunctional rotary actuator with magnetorheological fluid Smart Mater. Struct. 21 065012
[6] Bucchi F, Forte P, Frendo F and Squarcini R 2013 A magnetorheological clutch for efficient automotive auxiliary device actuation Frattura Integritá Strutturale 7 62–74
[7] Wu J, Jiang X, Yao J, Li H and Li Z 2016 Design and modeling of a multi-pole and dual-gap magnetorheological brake with individual currents Adv. Mech. Eng. 8 1–15
[8] Bucchi F, Forte P and Frendo F 2015 Analysis of the torque characteristic of amagnetorheological clutch using neural networks J. Intell. Mater. Syst. Struct. 26 680–913
[9]L.C.Ltd., www.lord.com/products-and-solutions/magnetorheological-(mr)/mrproducts.xml���˻��ڴ�����Һ�͵綯��ЧӦ�Ĵ��¶��϶������Ĵ�����ƺ�ʵ����������ǻ����������弤���Ĵ�������������������õ綯��ѧЧӦ�����������Լ 28�����ڽӺϣ�˲̬�����ڼ䣬��������������ϵͳ�ļ���ϵͳ����ת��˫����������“����”��������Եض�λ���豸�С�Ȼ����Щ�����ʹų�֮�������ò������ת �ء����Ť�ر��ӵ��ɴŻ����������崫�͵�Ť���ϣ���������������Ӻϣ��ر����������Σ�����Ҫ�����Ť�����˷����ܵľ�Ħ��ʱ��һ������ﵽ��ͬ���ٶȣ���������˵��ת�أ���ʧ��ת�ش��ݽ��ɴ�����Һȷ�������ڴ�ͳ�Ļ��ڴ�����Һ��������С���������������ͨ�� 3D ��̬ FEM ģ����Ƶģ������ڲ�ͬ���������µ�����ͨ����ԭ�͵�ʵ���������֤��
�����
[1] Rizzo R, Musolino A, Bucchi F, Forte P and Frendo F 2015 A multi-gap magnetorheological clutch with permanent magnet Smart Mater. Struct. 24 075012
[2] Bucchi F, Forte P and Frendo F 2014 A fail-safe magnetorheological clutch excited by permanent magnets for the disengagement of automotive auxiliaries J. Intell. Mater. Syst. Struct. 25 2102–14
[3] Armenio G, Bartalesi E, Bucchi F, Ferri A, Frendo F, Forte P, Rizzo R and Squarcini R 2011 Mechanical combustion engine driven fluid pump EPO Patent 11425176.2-2423
[4] Shiao Y and Nguyen Q 2013 Development of a multi-pole magnetorheological brake Smart Mater. Struct. 22 065008
[5] Guo H T and Liao W H 2012 A novel multifunctional rotary actuator with magnetorheological fluid Smart Mater. Struct. 21 065012
[6] Bucchi F, Forte P, Frendo F and Squarcini R 2013 A magnetorheological clutch for efficient automotive auxiliary device actuation Frattura Integritá Strutturale 7 62–74
[7] Wu J, Jiang X, Yao J, Li H and Li Z 2016 Design and modeling of a multi-pole and dual-gap magnetorheological brake with individual currents Adv. Mech. Eng. 8 1–15
[8] Bucchi F, Forte P and Frendo F 2015 Analysis of the torque characteristic of amagnetorheological clutch using neural networks J. Intell. Mater. Syst. Struct. 26 680–913
[10] Bartalesi E, Bucchi F and Squarcini R 2014 Vacuum actuation for axial movement of a magnet in a magnetorheological clutch EPO Patent WO2012EP66463 20120823
[11] EFFE, EFFE v2.00 user manual, Bathwick Electrical Design ltd, 2009
[12] Zschunke F, Rivas R and Brunn P O 2005 Temperature behavior of magnetorheological fluids Appl. Rheol. 15 116–21
[13] Bucchi F, Forte P and Frendo F 2015 Temperature effect on the torque characteristic of a magnetorheological clutch Mech. Adv. Mater. Struct. 22 150–8
[14] Yildirim G and Genc S 2013 Experimental study on heat transfer of the magnetorheological fluids Smart Mater. Struct. 22 085001