














苏ICP备112451047180号-6
500型水下运载工具设计
一设计任务
1.1设计内容
设计内容:500型水下运载工具设计
1.2研究内容及主要工作
(1)水下运载工具总体方案与本体结构的设计
(2)水下运载工具静态受力与稳定性分析
(3)水下运载工具受力分析与驱动平衡分析
(4)水下运载工具控制系统的设计
二文献综述
2.1课题研究的背景
日本高级科研所发明的车轮式水下运载工具[1],能在许多体积大的物体表面如油罐、球形煤气罐、船舶等的壁面运动,脱离了人类,也可以进行整理和清刷工作。在避免上的磁力吸附种水下运载工具的主要特点,其最大的优点是:步行速度大,速度在最大时有时可以达到9m/min,无论什么样的表面,都能够在其面上运动,并且不会破坏表面上的涂层。1989年,日本的早稻田大学的一个学者研究出吸盘式磁吸附水下运载工具[2],吸附工件与墙壁之间成一个角度,这个角度是倾斜的,并且倾斜角不大,这样吸附装置作用在垂直面上的作用力还是不小,并且每个吸附部件都和一个电机相连,通过电机的作用,与运动面接触的吸附部件运转,水下运载工具就随着向正方向运行,这种吸附部件对接触面的吸附力能够满足运行要求。
中华人民共和国的哈工大已经拥有了运载工具技术。哈尔滨发明出单吸盘真空吸附车轮运行的水下运载工具和永磁铁吸附履带水下运载工具[3]。其中磁吸附的履带形式的水下运载工具的是含有两个永磁吸附部件的履带式结构。含有永磁铁的装置以几十个为一组安装在履带上,与地面接触的那部分粘附运行面上,能够产生很大的吸力,把运载工具吸附在运行壁上,这样水下运载工具就拥有一定得能力,这种能力使履带能够在面上运动。这种运载工具可以在垂直或有角度的面上运动,这种运动是靠履带来实现的。在垂直或有角度的面上运行时,水下运载工具上在最前端的含有永磁铁的部件吸附到面上,最后一个含有永磁铁的部件在运行面上拔下来,就这样循环运动,就解决了水下运载工具在还有角度的面上的运行。
由于水下运载工具不行能够在平面上运动,而且还能在含有障碍物的面上运行,而且在含有角度的面上能从底部自动运行到上面或从上面返回到底部的作用。在研究此的基础上,日起公司在只有一个盘的形状的基础上研制了含有两个几多个吸盘的柱状圆柱杆的壁面运动运载工具[4]。该运载工具采用含有两个吸盘的结构,并把轮状运行工件放入到这个盘内,当他的运动面为垂直的平面时,还有两个吸盘的运动部件,在运行面上如果碰到阻碍时,这时只需要用其中一个吸盘吸住,阻碍物的通过可以通过另一个吸盘来解决。
在解决了在移动与吸附运动、跨越阻碍等困难处理之后,水下运载工具又开始向自主型运载工具的趋势研制。能够远程控制运载工具,是水下运载工具以后的发展趋势。
2.2研究的目的及其意义
针对锈病,推出一个新方式进行除锈,他以水下运载工具作为除锈的载体,利用永久磁铁的磁力量,使运载工具在船体表面吸附,用没有污染的自来水作为除锈的媒介,超高的能量的泵提供的能量,可以很好的进行除锈工作,并且可以同坐污水排水回收装置进行回收。对铁矿石资源的爆破计划的实行,大量的节省了铁矿石资源,而且不污染环境,由于运载工具的使用,使人们从恶劣的工作环境中释放出来,劳动者的工作是远程操作,这是很必要的。人工喷砂没有使用人工装置,这就会产生安全问题。同时,高压泵的能量是为了使盘上喷嘴出口的水的高速,板上的温度也很高,使钢板表面产生约800C的高温,且除锈质量等级完全可达到干喷砂的同等效果。同时,由于除锈过程中产生的废水和锈渣有专门的回收装置进行处理,所以对环境不产生任何污染。因此,本课题的提出与实施,将对传统除锈技术更新换代,为彻底治理船舶除锈对江河湖海污染的环保问题提供了解决方案,同时它将工人从繁重的劳动和恶劣的工作环境中解放了出来,符合我国目前正在构建以人为本的和谐社会的要求。本课题的开展对促进除锈设备技术的进步,提高经济效益和社会效益有着重大的意义。
2.3 水下运载工具在国内外的发展现状
由于传统水下运载工具具有很多的弱点(如对壁面的材料和形状适应性不强,跨越障碍物的能力弱,体积大,质量重等),所以运载工具今有有新的动向去显示。本章以下对运载工具进行了概述。
(1)吸附装置
近年来,研究小组,在美国,英国,俄罗斯,和其他国家,揭示了蜥蜴吸附的秘密,这个秘密就是分子间的作用力,范德华力。生物学家对蜥蜴的吸附机制基本原理和功能方面进行了研究,对蜥蜴的脚尖进行了类似的构造探索,因为身上有改善性聚合物,设计家对蜥蜴的吸附装置进行了模拟吸附装置,能过对随机形状的面进行吸附,对壁登固体阶段采取了有用性。
(2)移动方式
在运载工具运动时,车轮和轨迹移动法被广泛的使用,但是脚式移动追赶了车轮和轨迹移动化的优点。腿式运载工具比较容易过有沟的障碍物,运载工具的脚有很大的自由度,这种运载工具的运动更灵活,而且有很强的适应性。在运载工具离散的基础上,对运动面的接触很小,并且可以对手能到达的最佳点进行选择,进而克服障碍,这种运载工具具有最好的运用前景。
(3)驱动装置
传统伺服电机因功率重量比低,他的安装远离了驱动,马达高速运行,速度要减少,那么被传送系统的结构就很复杂,麻烦,这种形式不能满足使用要求,具有优势的小体积,重量轻小体积的功能性材料正在被研发,新的运载工具密度高。驱动伺服系统和微电动机的速度传感是运载工具的重要组成成分,研究研发的微电机可以直接驱动各种各样的高扭矩,小型,轻量,高精度,敏感,对中国人对运载工具的开发水平的研究工作是值得信赖的,对家用运载工具的高性能微电机保证满足。因为,运载工具领域的微电机的应用前景十分乐观,运载工具的开发用的微电机技术可以大致分为高精度,高信赖性,直接传动,新原理还有新结构,机械和电气合并,并向超细结构发展。
(4)能源问题
新能源的是一种迫切需要的东西,电池力量有强劲的表现,而且运载工具的远程控制提供了能源和控制信号。从国内到国外,日本制成功了这种新能源。日本的无线运载工具微波技术应用的很成功,这个技术的应用很大的扩展了运载工具的运行范围。
另外,微型水下运载工具的初期阶段的技术和微移动运载工具的运用,发展和扩大,有了这样的运用,就有了各种各样的极限的手动操作运载工具代替攀岩的墙壁。使用公共安全的小的运载工具可以在建筑物的排气管道中运行,也可以灾难现场进行访问,对敌人进行侦测,还可以对太空的原子能产业管道进行检测和修复。运载工具具有很强的战略意义,因此吸引了世界的注意。
三 方案论证及论证结果
3.1 吸附方式的选择
本次设计的水下运载工具的吸附方式有三种,即真空吸附,磁吸附和气流负压吸附

本课题所研究的水下运载工具是为了船的外表面除锈才研制的。因为船的外表面都是磁性的金属板,他的外面有甚多的焊接缝,由于长时间的风吹雨打日晒,其表面会生锈,表面会不光整。有上述各种方式的优点可知,由船体表面除锈这一情况,选用永磁吸附结构很恰当。永磁吸附方式的吸附力大小与永磁体的吸附面积成正比,而且对船的外表面的不光整有很强的适应性,而且,在毫无准备的情况下断电,仍然不会掉落损坏。
3.2行走方式的选择
根据相关文献,水下运载工具的行走方式主要有车轮式、履带式和多足步行式3种。车轮式有快的移动速度,柔性的控制,特别是转向设施很简单,但是车轮和壁面的接触面积很小,吸附力很难保持,但是转向难,而且很难再墙壁上转弯,简单的多足步行型的吸附力强,克服障碍,很简单,但是,慢慢的移动,在高的脚上要求协调性很高,而且控制困难
水下运载工具三种行走方式的比较

3.3 驱动方式的选择
运载工具常用的驱动方式有:液压驱动、气动驱动、电动驱动和机械式驱动四种基本方式。在这几种方式中,电机的具有小的体型,小的质量,快的反应,能够随时提供动力,有很好的制动性能,还可以快速正转或反转,和其他的几种驱动形式相比有很大的突出之处。当用电机时,有三个选择:步进电机、直流伺服电机和交流伺服电机。考虑到水下运载工具要求其驱动系统的反应很快,而且在运行面上运动时能够的灵活的运行,这时只有电机能满足设计要求。
在本水下运载工具系统中,设计两个电机的运行方式。水下运载工具在船体上工作时,水下运载工具的运动靠的是两个电机的转动。要想让运载工具向正向运动,就要是两个电机同速正转,向后运动时,就要同速反转,当不同速度时,就可以进行转向。
3.4论证结果
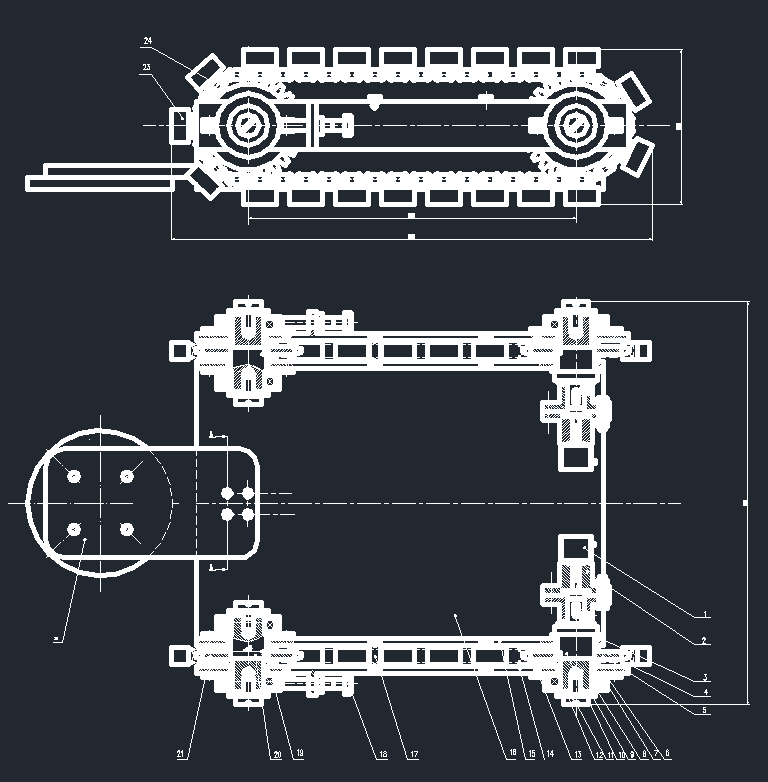
综上所述,本课题所研究的是采用永磁吸附、履带式行走、交流伺服电机驱动的除锈运载工具
四毕业设计工作进度计划。
五参考文献
[1] 徐殿国,王卫等.日本壁面移动机器人技术发展概况及我们的几点建议[J]。机器人.Vol3.No.41,1989
[2] 潘沛霖,韩秀琴等.日本磁吸附爬壁机器人的研究现状.机器人[J],Vol.16,No.6,Nov,1994 [3] 宗光华. 高层建筑擦窗机器人. 机器人技术与应用[J]。1998(2)
[4] 刘淑霞,王炎等.爬壁机器人技术的应用、机器人[J]。Vol.21.No.2,March.1999
[5] 熊有伦.机器人技术基础.华中理工大学出版社[M],1997.7
一设计任务
1.1设计内容
设计内容:500型水下运载工具设计
1.2研究内容及主要工作
(1)水下运载工具总体方案与本体结构的设计
(2)水下运载工具静态受力与稳定性分析
(3)水下运载工具受力分析与驱动平衡分析
(4)水下运载工具控制系统的设计
二文献综述
2.1课题研究的背景
日本高级科研所发明的车轮式水下运载工具[1],能在许多体积大的物体表面如油罐、球形煤气罐、船舶等的壁面运动,脱离了人类,也可以进行整理和清刷工作。在避免上的磁力吸附种水下运载工具的主要特点,其最大的优点是:步行速度大,速度在最大时有时可以达到9m/min,无论什么样的表面,都能够在其面上运动,并且不会破坏表面上的涂层。1989年,日本的早稻田大学的一个学者研究出吸盘式磁吸附水下运载工具[2],吸附工件与墙壁之间成一个角度,这个角度是倾斜的,并且倾斜角不大,这样吸附装置作用在垂直面上的作用力还是不小,并且每个吸附部件都和一个电机相连,通过电机的作用,与运动面接触的吸附部件运转,水下运载工具就随着向正方向运行,这种吸附部件对接触面的吸附力能够满足运行要求。
中华人民共和国的哈工大已经拥有了运载工具技术。哈尔滨发明出单吸盘真空吸附车轮运行的水下运载工具和永磁铁吸附履带水下运载工具[3]。其中磁吸附的履带形式的水下运载工具的是含有两个永磁吸附部件的履带式结构。含有永磁铁的装置以几十个为一组安装在履带上,与地面接触的那部分粘附运行面上,能够产生很大的吸力,把运载工具吸附在运行壁上,这样水下运载工具就拥有一定得能力,这种能力使履带能够在面上运动。这种运载工具可以在垂直或有角度的面上运动,这种运动是靠履带来实现的。在垂直或有角度的面上运行时,水下运载工具上在最前端的含有永磁铁的部件吸附到面上,最后一个含有永磁铁的部件在运行面上拔下来,就这样循环运动,就解决了水下运载工具在还有角度的面上的运行。
由于水下运载工具不行能够在平面上运动,而且还能在含有障碍物的面上运行,而且在含有角度的面上能从底部自动运行到上面或从上面返回到底部的作用。在研究此的基础上,日起公司在只有一个盘的形状的基础上研制了含有两个几多个吸盘的柱状圆柱杆的壁面运动运载工具[4]。该运载工具采用含有两个吸盘的结构,并把轮状运行工件放入到这个盘内,当他的运动面为垂直的平面时,还有两个吸盘的运动部件,在运行面上如果碰到阻碍时,这时只需要用其中一个吸盘吸住,阻碍物的通过可以通过另一个吸盘来解决。
在解决了在移动与吸附运动、跨越阻碍等困难处理之后,水下运载工具又开始向自主型运载工具的趋势研制。能够远程控制运载工具,是水下运载工具以后的发展趋势。
2.2研究的目的及其意义
针对锈病,推出一个新方式进行除锈,他以水下运载工具作为除锈的载体,利用永久磁铁的磁力量,使运载工具在船体表面吸附,用没有污染的自来水作为除锈的媒介,超高的能量的泵提供的能量,可以很好的进行除锈工作,并且可以同坐污水排水回收装置进行回收。对铁矿石资源的爆破计划的实行,大量的节省了铁矿石资源,而且不污染环境,由于运载工具的使用,使人们从恶劣的工作环境中释放出来,劳动者的工作是远程操作,这是很必要的。人工喷砂没有使用人工装置,这就会产生安全问题。同时,高压泵的能量是为了使盘上喷嘴出口的水的高速,板上的温度也很高,使钢板表面产生约800C的高温,且除锈质量等级完全可达到干喷砂的同等效果。同时,由于除锈过程中产生的废水和锈渣有专门的回收装置进行处理,所以对环境不产生任何污染。因此,本课题的提出与实施,将对传统除锈技术更新换代,为彻底治理船舶除锈对江河湖海污染的环保问题提供了解决方案,同时它将工人从繁重的劳动和恶劣的工作环境中解放了出来,符合我国目前正在构建以人为本的和谐社会的要求。本课题的开展对促进除锈设备技术的进步,提高经济效益和社会效益有着重大的意义。
2.3 水下运载工具在国内外的发展现状
由于传统水下运载工具具有很多的弱点(如对壁面的材料和形状适应性不强,跨越障碍物的能力弱,体积大,质量重等),所以运载工具今有有新的动向去显示。本章以下对运载工具进行了概述。
(1)吸附装置
近年来,研究小组,在美国,英国,俄罗斯,和其他国家,揭示了蜥蜴吸附的秘密,这个秘密就是分子间的作用力,范德华力。生物学家对蜥蜴的吸附机制基本原理和功能方面进行了研究,对蜥蜴的脚尖进行了类似的构造探索,因为身上有改善性聚合物,设计家对蜥蜴的吸附装置进行了模拟吸附装置,能过对随机形状的面进行吸附,对壁登固体阶段采取了有用性。
(2)移动方式
在运载工具运动时,车轮和轨迹移动法被广泛的使用,但是脚式移动追赶了车轮和轨迹移动化的优点。腿式运载工具比较容易过有沟的障碍物,运载工具的脚有很大的自由度,这种运载工具的运动更灵活,而且有很强的适应性。在运载工具离散的基础上,对运动面的接触很小,并且可以对手能到达的最佳点进行选择,进而克服障碍,这种运载工具具有最好的运用前景。
(3)驱动装置
传统伺服电机因功率重量比低,他的安装远离了驱动,马达高速运行,速度要减少,那么被传送系统的结构就很复杂,麻烦,这种形式不能满足使用要求,具有优势的小体积,重量轻小体积的功能性材料正在被研发,新的运载工具密度高。驱动伺服系统和微电动机的速度传感是运载工具的重要组成成分,研究研发的微电机可以直接驱动各种各样的高扭矩,小型,轻量,高精度,敏感,对中国人对运载工具的开发水平的研究工作是值得信赖的,对家用运载工具的高性能微电机保证满足。因为,运载工具领域的微电机的应用前景十分乐观,运载工具的开发用的微电机技术可以大致分为高精度,高信赖性,直接传动,新原理还有新结构,机械和电气合并,并向超细结构发展。
(4)能源问题
新能源的是一种迫切需要的东西,电池力量有强劲的表现,而且运载工具的远程控制提供了能源和控制信号。从国内到国外,日本制成功了这种新能源。日本的无线运载工具微波技术应用的很成功,这个技术的应用很大的扩展了运载工具的运行范围。
另外,微型水下运载工具的初期阶段的技术和微移动运载工具的运用,发展和扩大,有了这样的运用,就有了各种各样的极限的手动操作运载工具代替攀岩的墙壁。使用公共安全的小的运载工具可以在建筑物的排气管道中运行,也可以灾难现场进行访问,对敌人进行侦测,还可以对太空的原子能产业管道进行检测和修复。运载工具具有很强的战略意义,因此吸引了世界的注意。
三 方案论证及论证结果
3.1 吸附方式的选择
本次设计的水下运载工具的吸附方式有三种,即真空吸附,磁吸附和气流负压吸附
本课题所研究的水下运载工具是为了船的外表面除锈才研制的。因为船的外表面都是磁性的金属板,他的外面有甚多的焊接缝,由于长时间的风吹雨打日晒,其表面会生锈,表面会不光整。有上述各种方式的优点可知,由船体表面除锈这一情况,选用永磁吸附结构很恰当。永磁吸附方式的吸附力大小与永磁体的吸附面积成正比,而且对船的外表面的不光整有很强的适应性,而且,在毫无准备的情况下断电,仍然不会掉落损坏。
3.2行走方式的选择
根据相关文献,水下运载工具的行走方式主要有车轮式、履带式和多足步行式3种。车轮式有快的移动速度,柔性的控制,特别是转向设施很简单,但是车轮和壁面的接触面积很小,吸附力很难保持,但是转向难,而且很难再墙壁上转弯,简单的多足步行型的吸附力强,克服障碍,很简单,但是,慢慢的移动,在高的脚上要求协调性很高,而且控制困难
水下运载工具三种行走方式的比较
3.3 驱动方式的选择
运载工具常用的驱动方式有:液压驱动、气动驱动、电动驱动和机械式驱动四种基本方式。在这几种方式中,电机的具有小的体型,小的质量,快的反应,能够随时提供动力,有很好的制动性能,还可以快速正转或反转,和其他的几种驱动形式相比有很大的突出之处。当用电机时,有三个选择:步进电机、直流伺服电机和交流伺服电机。考虑到水下运载工具要求其驱动系统的反应很快,而且在运行面上运动时能够的灵活的运行,这时只有电机能满足设计要求。
在本水下运载工具系统中,设计两个电机的运行方式。水下运载工具在船体上工作时,水下运载工具的运动靠的是两个电机的转动。要想让运载工具向正向运动,就要是两个电机同速正转,向后运动时,就要同速反转,当不同速度时,就可以进行转向。
3.4论证结果
综上所述,本课题所研究的是采用永磁吸附、履带式行走、交流伺服电机驱动的除锈运载工具
四毕业设计工作进度计划。
| 起 迄 日 期 | 工 作 内 容 |
| 2013年2月25日~ 2月28日 | 下达设计任务,明确设计内容和要求 |
| 2013年1月25日~ 3月1日 | 文献检索,完成外文翻译 |
| 2013年3月1日~ 3月20日 | 参观、实习、调研、搜集资料,完成方案论证报告 |
| 2013年3月21日~ 4月20日 | 完成方案分析比较和论证等内容,确定总体方案 |
| 2013年4月21 日~ 5月20日 | 详细设备设计和绘图 |
| 2013年5月21 日~ 5月26日 | 图纸修改完善,编写设计说明书 |
| 2013年5月27日~ 5月31日 | 完善、修改所有设计材料,准备答辩 |
[1] 徐殿国,王卫等.日本壁面移动机器人技术发展概况及我们的几点建议[J]。机器人.Vol3.No.41,1989
[2] 潘沛霖,韩秀琴等.日本磁吸附爬壁机器人的研究现状.机器人[J],Vol.16,No.6,Nov,1994 [3] 宗光华. 高层建筑擦窗机器人. 机器人技术与应用[J]。1998(2)
[4] 刘淑霞,王炎等.爬壁机器人技术的应用、机器人[J]。Vol.21.No.2,March.1999
[5] 熊有伦.机器人技术基础.华中理工大学出版社[M],1997.7
目 录
1 绪论..........................................................................................................................................1
1.1国内外水下运载工具的研究现状..........................................................................................1
1.2国内外水下运载工具的发展趋势..........................................................................................5
1.3本课题的研究目的及其意义..................................................................................................7
2 水下运载工具的总体结构......................................................................................................8
2.1引言..........................................................................................................................................8
2.2水下运载结构的总体结构方案..............................................................................................8
2.3水下运载工具的总体结构设计.............................................................................................11
2.4小结.........................................................................................................................................21
致谢..............................................................................................................................................22
参考文献......................................................................................................................................23