














苏ICP备112451047180号-6
水下船体清刷机器人设计
摘要:研究水下船体清洗机器人目的是实现自动化清洗水下船体,使船舶使用寿命延长并且提高船舶速度;并取代能耗大的、劳动强度高的潜水员工作。在本篇文章中我们分析了国内外水下清刷装置的现状及在此方面取得的最新科技成果;同时介绍了水下清刷机器人的典型特征。根据水下清刷机器人的工作原理,我们应重点分析和研究水下清洁机器人永磁磁轮吸附、电机旋转、密封和机械自动化、水下清洗设备和机器人控制系统。水下清刷机器人应该运行容易,控制简单。
关键字:清刷机器人,水下船体 ,旋转运动,永磁,表面吸附,两级控制
1 前言
具有很强吸附性的海洋生物如海洋中的贝类和藻类等的吸附会促使船体表面的粗糙度越来越大,这些海洋生物很难被清刷掉。一艘大型原油运输船表面粗糙度如果平均增长10微米的话就会导致其多消耗1%的燃油。例如一艘载重50000吨的油轮运营12个月而不清理的话,它的速度会降低两节。换句话说,如果这艘油轮定期清洗(4个月一清洗)两年就会节省2000吨燃油,相当于节省500000美元(燃油的平均价格是250美元/吨)。用刷子潜到水下去清刷船底的附着物对潜水员来说是一种非常重的体力劳动。这项工作最显著的特点就是潜水员每分钟需要2.5-3.0升的氧气,潜水员心跳频率是每分钟140到160下。为了延长船体的寿命,增快船行驶的速度,减小船只燃料的消耗和潜水员的工作强度,研究水下清刷机器人的重要性就变得显而易见了。
美国的流体公司已经生产出了高压水枪自动清洗装置(一种具有多项优点比如易于操作、工作效率高且能满足环境保护的要求的喷水机器猫)。但是却没有被广泛地运用于国内的造船厂,因为其耗能过大。中国电力公司与日本三井船舶工程公司合作共同研发出了一种新型的水下清刷机器人,这种机器人能清洗和检查火电站的输水管道。这种机器人工作的优点是结构紧凑体积小,但是这种机器人的运动轨迹有时会不规则(很容易受气流或者水流的影响)并且它尚在研究中。在英国人们利用水下运载工具的原理来设计水下清刷装置,这样的装置吸附在船体表面利用液压马达横向或纵向地在船体表面爬行。这种清刷装置是可行的,但是它需要辅助设备。国内哈尔滨工程大学(位于中国东北的黑龙江省哈尔滨市)发展了一种以磁力吸附为原型的水下船体清刷机器人。这种机器人能吸附在船体上并且能在船体上爬行。但是它在做往返运动的时候容易打滑稳定性和灵活性都不是很好。此外还有一些问题如涉及到装置的静态和动态密封性及防腐措施等。现在这种机器人为模型的新型实用水下船体清刷机器人正在研究之中。
2 研发项目模型
2.1 技术要求
1)水下10米内船体表面工作
2)承重能力:大于300N
3)移动速度:0~8m/min
4)控制方式:有线遥控
2.2 系统工作原理
水下船体清刷机器人是有水上部分和水下部分组成。水上设备包括控制、启动和恢复装置,水下设备涉及从属工业计算机、吸附机理、驱动机构、清洗机构、位置传感器、姿态传感器、水下照相机等等。机器人系统概览如图1所示。
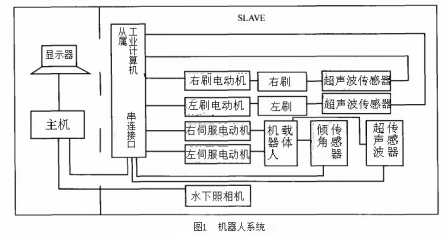
这种机器人在船体表面的运动是靠电动机驱动,靠两个电动机产生不同的角速度而转向。它使用的永磁吸附,工作过程中刷子按预先设定好的轨迹移动。清刷设备是有刷子,驱动执行模块和支撑物构成。两个电动机带动两个刷子反向旋转,移动清刷装置进行清洗直至完成工作。
2.3机器人载体的设计
2.3.1永久磁铁吸附方案设计
在机器人的设计过程中我们可以选择三种吸附方案:真空负压吸附、磁铁吸附(永久磁铁吸附)、推力吸附。真空负压吸附可有真空泵或高压注射器制造吸盘真空状态而获得,这种吸附方式不受船体材料影响,但是当船体不是很平的时候会造成吸盘漏气,有损吸附能力和承载能力,它的吸附能力要远小于磁吸附能力。磁吸附分为永久磁铁吸附和电磁吸附,磁吸附要求船体表面是导磁体,它很容易适用于表面不均匀简单的密闭机构。当表面是导磁体的时候,磁吸附当是首选。推力吸附是靠螺旋桨产生适当的推力使机器人稳定可靠地吸附在船体表面。机器人可以轻松克服障碍和适应各种各样的外壳,因为其推力总是指向外部。但是因为海浪和洋流的干扰,利用这种吸附方式的机器人的运动不容易得到控制。考虑到船体的表面是导磁体,船体表面是曲面且遍布凸起的焊缝,永久磁铁吸附方案是一个可靠的选择。这种吸附方式相当安全可靠,甚至在突然停电的情况下也不会掉落。电磁铁需要励磁电流,而且很频繁地受到通电断电的影响。(图2)
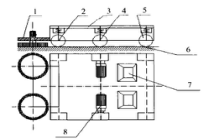
图2 水下清刷机器人
1 刷子 2 前导向轮 3 车身 4 主动轮 5 后轮
2.3.2磁铁轮移动机制的设计
水下船体清刷机器人有三种不同的移动方式,包括轮式移动、轨道移动、步行移动。通过转向测试,采取双轨道设计方案不够灵活。至于在地心引力作用下水下行走方式的机器人相当笨重,而且在巨大的阻力作用下这种机器人的行走相当缓慢。那么在这里就选择移动灵活快的速永久磁铁轮式移动方式。车轮和车体的关节采用弹簧减震器,这样就能在磁轮穿越障碍物的时候舒缓震动吸收能量确保磁轮与船体随时接触。间隙之间存在磁轮和船体表面通量是不均匀分布的,它的磁力计算如下:
公式中“F”指磁吸引力;“B”为磁感应强度;“S”指磁极面面积;“
 ”指校正系数;“
”指校正系数;“
 ”是指间隙宽度。
”是指间隙宽度。
轮子分成6个,中间的两个是主动轮;剩余的4个采用普通的车轮作为从动轮。当机器人向前走或者向后退的时候,两个主动轮的速度是相同的;当机器人转向,两个驱动轮的速度是不同的,瞬时回转中心落在两个轮子的中心线上,其转弯原理如图3所示
在图中“o-xyz”是固定的坐标系统;“
 -UVW”是机器人的相对位置坐标;“P”定义的驱动轮的中心中点段;“P”和“
-UVW”是机器人的相对位置坐标;“P”定义的驱动轮的中心中点段;“P”和“
 ”重合;“b”是两个驱动轮中心间的长度;假设驾驶速度的左侧驱动轮是
”重合;“b”是两个驱动轮中心间的长度;假设驾驶速度的左侧驱动轮是
 右侧的轮子的速度是
右侧的轮子的速度是
 控制系统在船体表面的运动变量是v的方向沿“
控制系统在船体表面的运动变量是v的方向沿“
 ”两个轮子线速度不同,则角速度
”两个轮子线速度不同,则角速度
 不同
不同
这个机器人的速度公式为
式中


 “
“
 ”是第一个驱动轮的角速度“
”是第一个驱动轮的角速度“
 ”是第二个驱动轮的角速度。机器人驱动轮转速计算公式如下:
”是第二个驱动轮的角速度。机器人驱动轮转速计算公式如下:
水下清刷设备是水下清刷机器人的执行机构,它由刷子、动力执行元件(电动机)和支架构成。清洗托盘和不锈钢制成的耦合器及同是不锈钢材料的金属刷丝构成刷子。为了达到高效的清洗效率,应该选用坚硬且具有弹性的金属刷丝。清洗托盘是由铝合金制成的安装在它的耦合器上连接着电动机。支架也是由铝合金制成轴承是防水的。两个清洗设备相对装在机器人载体上。图4是清刷设备安装结构方案
参考文献:
[1] 袁夫彩,孟庆鑫,等. 水下清刷装置优化设计及实验[J].船舶工程.2004(6):57-59.
[2] 何庆. 机械制造专业毕业设计指导与范例.化学工业出版社[M],2007:3-6.
[3] 王丽慧,孟庆鑫.水下机器人清刷作业装置研究.机械制造[J] .2005(8):20-22.
[4] 孟庆鑫,王丽慧,等.水下船体表面清刷机器人方案研究[J].船舶工程.2002(1):44-46.
[5] 李敏. 水下清洗技术在天津港船舶节能的应用.物流工程与管理[J] .2009(9):104-107.
摘要:研究水下船体清洗机器人目的是实现自动化清洗水下船体,使船舶使用寿命延长并且提高船舶速度;并取代能耗大的、劳动强度高的潜水员工作。在本篇文章中我们分析了国内外水下清刷装置的现状及在此方面取得的最新科技成果;同时介绍了水下清刷机器人的典型特征。根据水下清刷机器人的工作原理,我们应重点分析和研究水下清洁机器人永磁磁轮吸附、电机旋转、密封和机械自动化、水下清洗设备和机器人控制系统。水下清刷机器人应该运行容易,控制简单。
关键字:清刷机器人,水下船体 ,旋转运动,永磁,表面吸附,两级控制
1 前言
具有很强吸附性的海洋生物如海洋中的贝类和藻类等的吸附会促使船体表面的粗糙度越来越大,这些海洋生物很难被清刷掉。一艘大型原油运输船表面粗糙度如果平均增长10微米的话就会导致其多消耗1%的燃油。例如一艘载重50000吨的油轮运营12个月而不清理的话,它的速度会降低两节。换句话说,如果这艘油轮定期清洗(4个月一清洗)两年就会节省2000吨燃油,相当于节省500000美元(燃油的平均价格是250美元/吨)。用刷子潜到水下去清刷船底的附着物对潜水员来说是一种非常重的体力劳动。这项工作最显著的特点就是潜水员每分钟需要2.5-3.0升的氧气,潜水员心跳频率是每分钟140到160下。为了延长船体的寿命,增快船行驶的速度,减小船只燃料的消耗和潜水员的工作强度,研究水下清刷机器人的重要性就变得显而易见了。
美国的流体公司已经生产出了高压水枪自动清洗装置(一种具有多项优点比如易于操作、工作效率高且能满足环境保护的要求的喷水机器猫)。但是却没有被广泛地运用于国内的造船厂,因为其耗能过大。中国电力公司与日本三井船舶工程公司合作共同研发出了一种新型的水下清刷机器人,这种机器人能清洗和检查火电站的输水管道。这种机器人工作的优点是结构紧凑体积小,但是这种机器人的运动轨迹有时会不规则(很容易受气流或者水流的影响)并且它尚在研究中。在英国人们利用水下运载工具的原理来设计水下清刷装置,这样的装置吸附在船体表面利用液压马达横向或纵向地在船体表面爬行。这种清刷装置是可行的,但是它需要辅助设备。国内哈尔滨工程大学(位于中国东北的黑龙江省哈尔滨市)发展了一种以磁力吸附为原型的水下船体清刷机器人。这种机器人能吸附在船体上并且能在船体上爬行。但是它在做往返运动的时候容易打滑稳定性和灵活性都不是很好。此外还有一些问题如涉及到装置的静态和动态密封性及防腐措施等。现在这种机器人为模型的新型实用水下船体清刷机器人正在研究之中。
2 研发项目模型
2.1 技术要求
1)水下10米内船体表面工作
2)承重能力:大于300N
3)移动速度:0~8m/min
4)控制方式:有线遥控
2.2 系统工作原理
水下船体清刷机器人是有水上部分和水下部分组成。水上设备包括控制、启动和恢复装置,水下设备涉及从属工业计算机、吸附机理、驱动机构、清洗机构、位置传感器、姿态传感器、水下照相机等等。机器人系统概览如图1所示。
这种机器人在船体表面的运动是靠电动机驱动,靠两个电动机产生不同的角速度而转向。它使用的永磁吸附,工作过程中刷子按预先设定好的轨迹移动。清刷设备是有刷子,驱动执行模块和支撑物构成。两个电动机带动两个刷子反向旋转,移动清刷装置进行清洗直至完成工作。
2.3机器人载体的设计
2.3.1永久磁铁吸附方案设计
在机器人的设计过程中我们可以选择三种吸附方案:真空负压吸附、磁铁吸附(永久磁铁吸附)、推力吸附。真空负压吸附可有真空泵或高压注射器制造吸盘真空状态而获得,这种吸附方式不受船体材料影响,但是当船体不是很平的时候会造成吸盘漏气,有损吸附能力和承载能力,它的吸附能力要远小于磁吸附能力。磁吸附分为永久磁铁吸附和电磁吸附,磁吸附要求船体表面是导磁体,它很容易适用于表面不均匀简单的密闭机构。当表面是导磁体的时候,磁吸附当是首选。推力吸附是靠螺旋桨产生适当的推力使机器人稳定可靠地吸附在船体表面。机器人可以轻松克服障碍和适应各种各样的外壳,因为其推力总是指向外部。但是因为海浪和洋流的干扰,利用这种吸附方式的机器人的运动不容易得到控制。考虑到船体的表面是导磁体,船体表面是曲面且遍布凸起的焊缝,永久磁铁吸附方案是一个可靠的选择。这种吸附方式相当安全可靠,甚至在突然停电的情况下也不会掉落。电磁铁需要励磁电流,而且很频繁地受到通电断电的影响。(图2)
图2 水下清刷机器人
1 刷子 2 前导向轮 3 车身 4 主动轮 5 后轮
2.3.2磁铁轮移动机制的设计
水下船体清刷机器人有三种不同的移动方式,包括轮式移动、轨道移动、步行移动。通过转向测试,采取双轨道设计方案不够灵活。至于在地心引力作用下水下行走方式的机器人相当笨重,而且在巨大的阻力作用下这种机器人的行走相当缓慢。那么在这里就选择移动灵活快的速永久磁铁轮式移动方式。车轮和车体的关节采用弹簧减震器,这样就能在磁轮穿越障碍物的时候舒缓震动吸收能量确保磁轮与船体随时接触。间隙之间存在磁轮和船体表面通量是不均匀分布的,它的磁力计算如下:
公式中“F”指磁吸引力;“B”为磁感应强度;“S”指磁极面面积;“
轮子分成6个,中间的两个是主动轮;剩余的4个采用普通的车轮作为从动轮。当机器人向前走或者向后退的时候,两个主动轮的速度是相同的;当机器人转向,两个驱动轮的速度是不同的,瞬时回转中心落在两个轮子的中心线上,其转弯原理如图3所示
在图中“o-xyz”是固定的坐标系统;“
这个机器人的速度公式为
式中
通过这个公式我们知道两个驱动轮的速度一定时回转半径R是与b成正比关系,与两驱动轮的旋转速度的差呈反比关系。为了灵活地转弯,R应该越小越好,这就意味着应减小“b”的长度或者增大两轮的速度差。但是“b”是这个运动机制设计中设定的,当“b”取固定值的时候,就意味着“R”的大小只和两轮间的速度差有关。
2.3.3密封和防腐结构的设计
在设计水下船体清刷机器人的时候,密封和防腐蚀是两个至关重要的关键因素。控制单元可以安装在专门设计的防水有机塑料抗压特性室中。静态密封采用丁腈橡胶环形环密封,驱动伺服电动机和减速机安装在压力补偿箱中,减速器之间和耦合器之间的转动轴,应采用组合密封形式(环形圈的组合和聚四氟乙烯滑动环)进行密封。对于电缆和控制线路可以用柱状环形橡胶来密封,这些线路的接线处可以用防水材料的插头和模制橡胶管进行密封。因为机器的作业是在海洋环境中,盐雾腐蚀、海水的化学腐蚀、海水中电位差对金属造成的腐蚀、应力腐蚀、金属零件的间隙腐蚀等随时存在,那么防腐蚀保护措施在机器的设计和加工过程中应被考虑周到。因此在选择材料的时候以下材料应成为首选:在海水中耐腐蚀的合金(例如铝合金),在海水中耐腐蚀的非金属材料(特殊尼龙、丁二烯丙烯腈橡胶、有机塑料有机玻璃等),此外电镀材料(电镀铬、电镀镍材料等),还有在表面涂上防海水腐蚀的油漆也是防腐的重要手段。
2.4 水下清刷装置的设计
2.3.3密封和防腐结构的设计
在设计水下船体清刷机器人的时候,密封和防腐蚀是两个至关重要的关键因素。控制单元可以安装在专门设计的防水有机塑料抗压特性室中。静态密封采用丁腈橡胶环形环密封,驱动伺服电动机和减速机安装在压力补偿箱中,减速器之间和耦合器之间的转动轴,应采用组合密封形式(环形圈的组合和聚四氟乙烯滑动环)进行密封。对于电缆和控制线路可以用柱状环形橡胶来密封,这些线路的接线处可以用防水材料的插头和模制橡胶管进行密封。因为机器的作业是在海洋环境中,盐雾腐蚀、海水的化学腐蚀、海水中电位差对金属造成的腐蚀、应力腐蚀、金属零件的间隙腐蚀等随时存在,那么防腐蚀保护措施在机器的设计和加工过程中应被考虑周到。因此在选择材料的时候以下材料应成为首选:在海水中耐腐蚀的合金(例如铝合金),在海水中耐腐蚀的非金属材料(特殊尼龙、丁二烯丙烯腈橡胶、有机塑料有机玻璃等),此外电镀材料(电镀铬、电镀镍材料等),还有在表面涂上防海水腐蚀的油漆也是防腐的重要手段。
2.4 水下清刷装置的设计
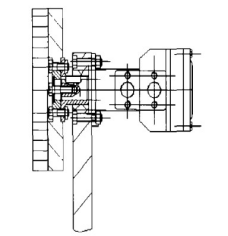
水下清刷设备是水下清刷机器人的执行机构,它由刷子、动力执行元件(电动机)和支架构成。清洗托盘和不锈钢制成的耦合器及同是不锈钢材料的金属刷丝构成刷子。为了达到高效的清洗效率,应该选用坚硬且具有弹性的金属刷丝。清洗托盘是由铝合金制成的安装在它的耦合器上连接着电动机。支架也是由铝合金制成轴承是防水的。两个清洗设备相对装在机器人载体上。图4是清刷设备安装结构方案
图4 清刷装置安装图示
2.5 控制系统的设计
水下船体清刷机器人的控制系统采用的是两级控制系统(图1)主机放在手推车上可以在甲板上自由移动,可以完成人机交互。界面可输入初始环境值、指定任务、路径规划和显示机器人的信息,等等。从属计算机固定在机器人载体上,从主机接受指令,控制移动机构和清洗装置。信息和电力是通过脐带电缆传送,通过倾角落盘和超声波传感器来侦测机器人的位置和姿势,以控制其完成清刷作业。水下照相机可以显示机器人的工作信息,也可以检测水下船体的情况。
3 总结
水下船体清刷机器人的发展现状被国内外所关注,应用原型建立起来的综合优势,采取理论原型作为参考产生新的模型特征方便控制,利用这种设计方法设计出的水下清刷机器人,不仅能用于水下船体的清刷,也能用于水下船体的探测。
2.5 控制系统的设计
水下船体清刷机器人的控制系统采用的是两级控制系统(图1)主机放在手推车上可以在甲板上自由移动,可以完成人机交互。界面可输入初始环境值、指定任务、路径规划和显示机器人的信息,等等。从属计算机固定在机器人载体上,从主机接受指令,控制移动机构和清洗装置。信息和电力是通过脐带电缆传送,通过倾角落盘和超声波传感器来侦测机器人的位置和姿势,以控制其完成清刷作业。水下照相机可以显示机器人的工作信息,也可以检测水下船体的情况。
3 总结
水下船体清刷机器人的发展现状被国内外所关注,应用原型建立起来的综合优势,采取理论原型作为参考产生新的模型特征方便控制,利用这种设计方法设计出的水下清刷机器人,不仅能用于水下船体的清刷,也能用于水下船体的探测。
参考文献:
[1] 袁夫彩,孟庆鑫,等. 水下清刷装置优化设计及实验[J].船舶工程.2004(6):57-59.
[2] 何庆. 机械制造专业毕业设计指导与范例.化学工业出版社[M],2007:3-6.
[3] 王丽慧,孟庆鑫.水下机器人清刷作业装置研究.机械制造[J] .2005(8):20-22.
[4] 孟庆鑫,王丽慧,等.水下船体表面清刷机器人方案研究[J].船舶工程.2002(1):44-46.
[5] 李敏. 水下清洗技术在天津港船舶节能的应用.物流工程与管理[J] .2009(9):104-107.