














��ICP��112451047180��-6
�����е������Ż�
1��������������
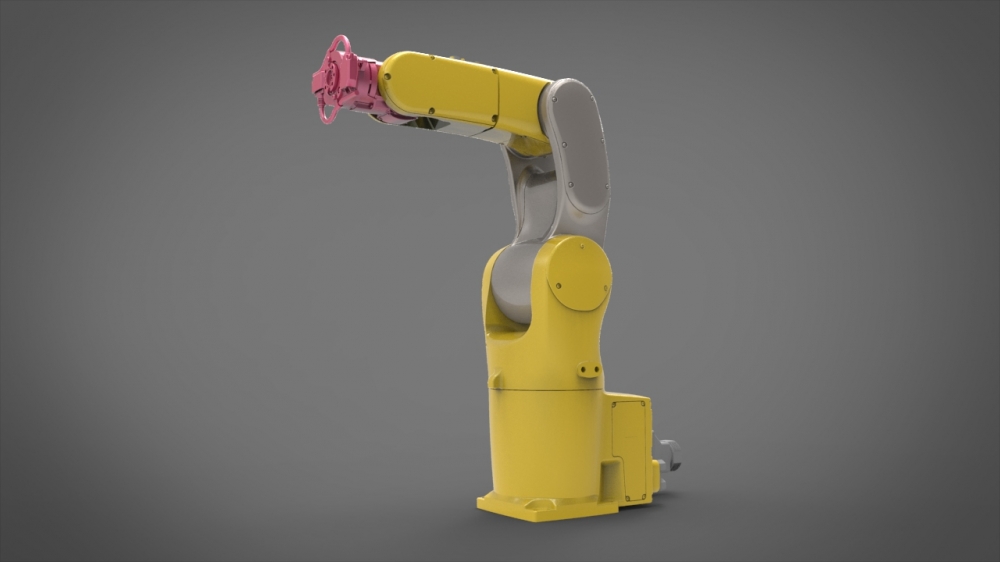
��е�������������͵õ����˵�ϲ�������ǻ��ڵڶ��ι�ҵ�����͵����ι�ҵ�����IJ����е�����÷�������ؽڵ�ԭ���������������Σ�յģ��ظ��ģ������ģ��������˻����Ĺ�������е����������70�����ʼ���ҹ�Ӧ�á����ڽ������ҹ����Ͷ��ɱ��������ڶ��ı���û�е�ִ��湤�ˣ���е�ֵ�������������������е�ּ����������壬�����������������ŷ���������˱����⣬��������ļ����ҹ���û���ա�
�����е�֣����ҹ�����ҵ���Ӧ�õĹ�ҵ�����ˡ���ҪӦ���ڻ��������ϡ����ᡢ��Ϳ�������˷ּ𡢻���������ȥë�����ĥ���������װ�ȹ�������Ŀǰ���������е�ֵľ��Ȳ��ߣ���������������������������������е�ֵ��Ż���ƹ���ؽ���ɴ���
2��������Ļ�������
��һ���֣�����ʵ�ص���ҵ���䡢�ι�չ�ᡢ�����鼮�ķ�ʽ����ȷ�����е�ֵ�Ӧ��
�ڶ����֣���Ӧ���з��������е�ִ��ڵ�����
�������֣��ҳ������ԭ�����Ϳ��Ʒ��棩��������ԭ����������Ϳ���ϵͳ���Ż���Ʒ���
���IJ��֣������������������Ƽ����������ֲ�������������ͼ��װ��ͼ
���岿�֣�ѡ���Ż�����
3����������ص���ѵ�
�ص㣺
1���˽������е�ֵĽṹ����ԭ��
2��ȷ��Ҫʵ�ص��е���ҵ���䣬ȷ��Ҫ�ι۵�չ��
3�����ݹ۲������е�ֵĹ���������������Ա���������е�ִ��ڵ����⣬��Ѱ�ҵ��������ԭ�����Ϳ��Ʒ��棩
4������Ҫ�ﵽ�Ĺ���Ч����ȷ�������е�ָ������
5���滭����Ҫ�ĵ���������ͼ��װ��ͼ
�ѵ㣺
1�����������Ż����
2����������
3������ϵͳ���Ż����
4���������
ժҪ
��һ�� ����
1.1 �����е�ֵļ��
1.2 �о��ı���������
1.2 �����������е�ֵķ�չ��ʷ������
1.3 �����е����ʵ�������е�Ӧ��
1.4 �������Ҫ�о�����
�ڶ��� �����е�ֵĻ�е�ṹ�����㲿��
2.1 ��е�ṹ����
2.2 �ŷ����
2.3 ������
2.4 ͬ������
������ ���巽����ȷ��
3.1 ��ҵ���м��ι�չ�����
3.2 �ڼӹ������������е�ֳ��ֵIJ���
3.3 ���ֲ����ԭ��
1.�ؽ���Ʋ���
1.������
2.����Ĺ����Ƕ�
3.�ŷ������ѡ��
4.���
5.����
��1���������
��2����������
������ ���������Ԫ����
4.1 J1�������Ԫ����
4.2 J2�������Ԫ����
4.3 J3�������Ԫ����
4.4 J4�������Ԫ����
4.5 J5�������Ԫ����
4.6 J6�������Ԫ����
������ �Ż�����
5.1 ���������Ż�
5.2 ���Ṥ���Ƕȵ��Ż�
5.3 �ŷ�������Ż�
5.4 ��е��Ż�
5.5 ���Ƶ��Ż�
����
�����
��л
5�������
��1�� ����Ʒ������������̲��ϡ��� ��е��ҵ������ 2012��
��2�� �ﻸ������ģ�����Ľܣ� ����еԭ�������߰棩���� �ߵȽ��������� 2010��
��3�� �����ӣ� �����紫�����ƣ����İ棩���� ���пƼ���ѧ������ 2007��
���������������е�Ʒ�Ƶ�ѡ���ֲ�
��4�� ��õ������������� �������˼���������е��ҵ������
��������� ������е��ƣ��ڰ˰棩�� ���ߵȽ��������� 2006��
6�������
2017��1����Ѯ �ռ����ҵ��ƿ�����ص����ϣ���ɿ��ⱨ���������顣
2017��1����Ѯ �˽������е�ֵĽṹ����ԭ��
2017��1����Ѯ ȷ��Ҫʵ�ص��е���ҵ���䣬ȷ��Ҫ�ι۵�չ��
2017��2����Ѯ ʵ�ص�����ҵ���ι�չ��
2017��2����Ѯ ���ݵ�����ҵ��չ���Ϸ��ֵ������е�ִ��ڵIJ��㣬Ѱ��ԭ��
2017��3����Ѯ ��������Ԫ��������������
2017��3����Ѯ ���Ƴ���Ҫ�Ż�����������ͼ
2017��3����Ѯ ������������ŷ����������ϵͳ�ȵ��Ż�����
2017��4����Ѯ ������˵���顢�Ͻ���ָ����ʦ����
2017��4����Ѯ �����ϣ����д�硣
1��������������
��е�������������͵õ����˵�ϲ�������ǻ��ڵڶ��ι�ҵ�����͵����ι�ҵ�����IJ����е�����÷�������ؽڵ�ԭ���������������Σ�յģ��ظ��ģ������ģ��������˻����Ĺ�������е����������70�����ʼ���ҹ�Ӧ�á����ڽ������ҹ����Ͷ��ɱ��������ڶ��ı���û�е�ִ��湤�ˣ���е�ֵ�������������������е�ּ����������壬�����������������ŷ���������˱����⣬��������ļ����ҹ���û���ա�
�����е�֣����ҹ�����ҵ���Ӧ�õĹ�ҵ�����ˡ���ҪӦ���ڻ��������ϡ����ᡢ��Ϳ�������˷ּ𡢻���������ȥë�����ĥ���������װ�ȹ�������Ŀǰ���������е�ֵľ��Ȳ��ߣ���������������������������������е�ֵ��Ż���ƹ���ؽ���ɴ���
2��������Ļ�������
��һ���֣�����ʵ�ص���ҵ���䡢�ι�չ�ᡢ�����鼮�ķ�ʽ����ȷ�����е�ֵ�Ӧ��
�ڶ����֣���Ӧ���з��������е�ִ��ڵ�����
�������֣��ҳ������ԭ�����Ϳ��Ʒ��棩��������ԭ����������Ϳ���ϵͳ���Ż���Ʒ���
���IJ��֣������������������Ƽ����������ֲ�������������ͼ��װ��ͼ
���岿�֣�ѡ���Ż�����
3����������ص���ѵ�
�ص㣺
1���˽������е�ֵĽṹ����ԭ��
2��ȷ��Ҫʵ�ص��е���ҵ���䣬ȷ��Ҫ�ι۵�չ��
3�����ݹ۲������е�ֵĹ���������������Ա���������е�ִ��ڵ����⣬��Ѱ�ҵ��������ԭ�����Ϳ��Ʒ��棩
4������Ҫ�ﵽ�Ĺ���Ч����ȷ�������е�ָ������
5���滭����Ҫ�ĵ���������ͼ��װ��ͼ
�ѵ㣺
1�����������Ż����
2����������
3������ϵͳ���Ż����
4���������
ժҪ
��һ�� ����
1.1 �����е�ֵļ��
1.2 �о��ı���������
1.2 �����������е�ֵķ�չ��ʷ������
1.3 �����е����ʵ�������е�Ӧ��
1.4 �������Ҫ�о�����
�ڶ��� �����е�ֵĻ�е�ṹ�����㲿��
2.1 ��е�ṹ����
2.2 �ŷ����
2.3 ������
2.4 ͬ������
������ ���巽����ȷ��
3.1 ��ҵ���м��ι�չ�����
3.2 �ڼӹ������������е�ֳ��ֵIJ���
3.3 ���ֲ����ԭ��
1.�ؽ���Ʋ���
1.������
2.����Ĺ����Ƕ�
3.�ŷ������ѡ��
4.���
5.����
��1���������
��2����������
������ ���������Ԫ����
4.1 J1�������Ԫ����
4.2 J2�������Ԫ����
4.3 J3�������Ԫ����
4.4 J4�������Ԫ����
4.5 J5�������Ԫ����
4.6 J6�������Ԫ����
������ �Ż�����
5.1 ���������Ż�
5.2 ���Ṥ���Ƕȵ��Ż�
5.3 �ŷ�������Ż�
5.4 ��е��Ż�
5.5 ���Ƶ��Ż�
����
�����
��л
5�������
��1�� ����Ʒ������������̲��ϡ��� ��е��ҵ������ 2012��
��2�� �ﻸ������ģ�����Ľܣ� ����еԭ�������߰棩���� �ߵȽ��������� 2010��
��3�� �����ӣ� �����紫�����ƣ����İ棩���� ���пƼ���ѧ������ 2007��
���������������е�Ʒ�Ƶ�ѡ���ֲ�
��4�� ��õ������������� �������˼���������е��ҵ������
��������� ������е��ƣ��ڰ˰棩�� ���ߵȽ��������� 2006��
6�������
2017��1����Ѯ �ռ����ҵ��ƿ�����ص����ϣ���ɿ��ⱨ���������顣
2017��1����Ѯ �˽������е�ֵĽṹ����ԭ��
2017��1����Ѯ ȷ��Ҫʵ�ص��е���ҵ���䣬ȷ��Ҫ�ι۵�չ��
2017��2����Ѯ ʵ�ص�����ҵ���ι�չ��
2017��2����Ѯ ���ݵ�����ҵ��չ���Ϸ��ֵ������е�ִ��ڵIJ��㣬Ѱ��ԭ��
2017��3����Ѯ ��������Ԫ��������������
2017��3����Ѯ ���Ƴ���Ҫ�Ż�����������ͼ
2017��3����Ѯ ������������ŷ����������ϵͳ�ȵ��Ż�����
2017��4����Ѯ ������˵���顢�Ͻ���ָ����ʦ����
2017��4����Ѯ �����ϣ����д�硣