

苏ICP备112451047180号-6
基于STC89C52单片机超声避障救援机器人设计
一、选题简介、意义
选题简介:地震作为最危险的地质灾害之一, 地震灾难发生之后,在救援的“黄金 72 h”内,开展并完成救援工作能最大限度的抢救幸存者的生命以及减少灾难造成的损失。因此,及时的了解地震现场情况对救援工作的有效完成具有重要意义。但是大多数情况下,地震现场存在具有无法预知、破坏力大、易引发次生灾害等因素,如有害气体弥漫、地理环境的变更导致的其他危险等,时刻威胁着人类生命财产的安全,这些因素导致救援人员无法第一时间在灾难现场实施救援工作。如果在救援人员的安全得不到充分保障的前提下强行实施救援工作,不但无法完成救援工作,而且会造成更大的损失。因此, 设计一款机器人, 用于地震后72小时为救援黄金时期废墟内被困人员的搜索工作, 帮助救援人员及时掌握被困者位置及其周围环境情况, 可以有效减少人员伤亡、提高搜救效率。本文设计了地震搜救机人的结构设计、给出了控制系统的设计及其创新点。
二、课题综述(课题研究,主要研究的内容,要解决的问题,预期目标,研究步骤、方法及措施等)
课题研究:基于STC89C52单片机的救援机器人设计
主要研究内容:
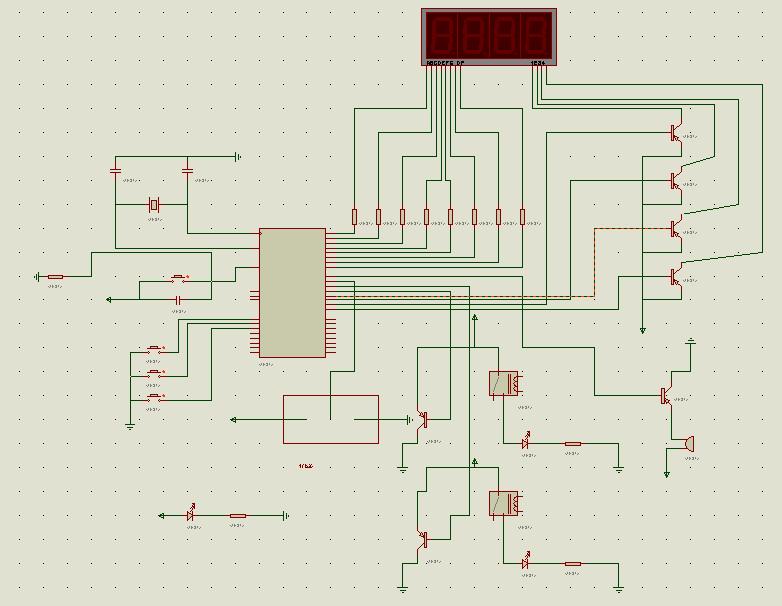
利用 Altium Designer PCB 应用软件设计出机器人的电路版图,以及制板完成机器
人的组装
1.熟悉 KEIL软件环境,各个菜单功能。
2.了解各个元器件封装及引脚功能。
3.查阅资料了解各个传感器的工作原理以及各种门电路之间引脚的用处与接法。
4.成板后的检测与调试
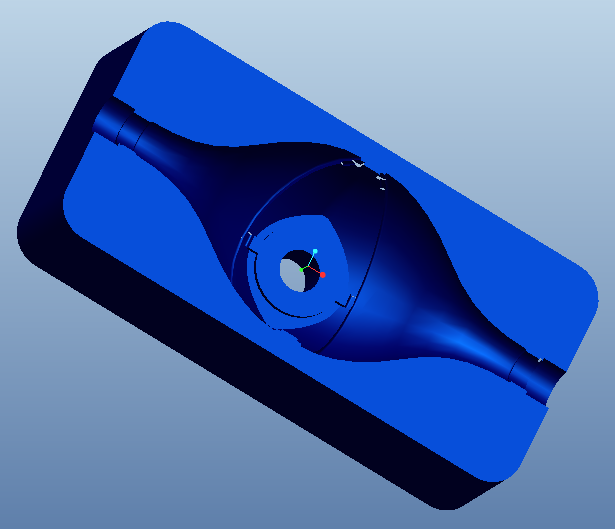
5.机器人的组装与大小的设计
解决问题:
1.门电路的选择以及引脚之间的连接;
2. KEIL应用软件的安装,系统原理图的绘制;
3.机器人外观的设计;
4.板图的绘制与测试;
5.各种元器件的封装规格的大小
预期目标:
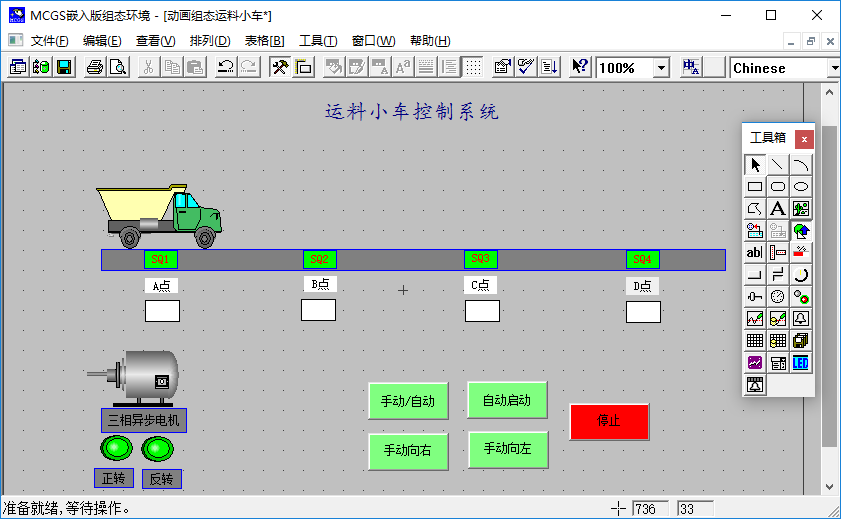
可以通过蓝牙、WiFi手柄遥控让机器人前进后退。
(五)研究步骤
第一阶段 查阅资料对各门电路的型号与规格进行选择,了解KEIL应用软件的安装与使用方法,下载 Altium Designer PBC软件,进行原理图的绘制,撰写开题报告;
第二阶段 确定应用系统要求、硬件的选择组合、进行机器人的制作;
第三阶段 软硬件联合仿真;
第四阶段 整理资料,完成毕业设计,准备毕业答辩;
三、设计(论文)体系、结构(大纲)
摘要
1 引言
1.1 概述
1.2 现阶段国内外机器人的现状
1.3 毕业论文研究的内容
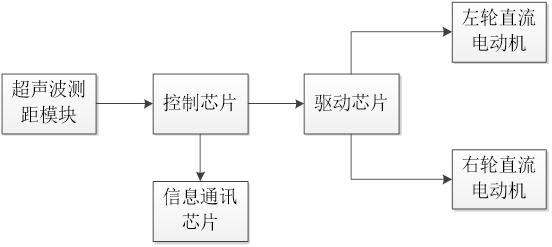
2救援机器人总体设计方案
2.1 总体设计思路
2.1.1硬件设计方案
2.1.2软件设计方案
2.2救援机器人总体设计方案论证与选择
2.2.1单片机的选择
2.2.2超声波测距模块的选择
2.2.3驱动模块的选择
2.2.4信息传递模块的选择
2.2.5软件开发环境的选择
2.3救援机器人的总体设计要求
3救援机器人硬件电路的设计
3.1救援机器人各硬件部分芯片介绍
3.1.1 STC89C52单片机介绍
3.1.2 HC-SR04模块介绍
3.1.3 ULN2803驱动芯片介绍
3.1.4 HC05-V 1.0蓝牙模块
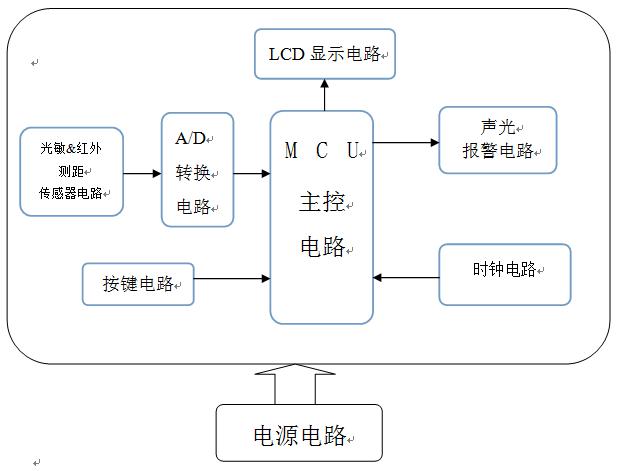
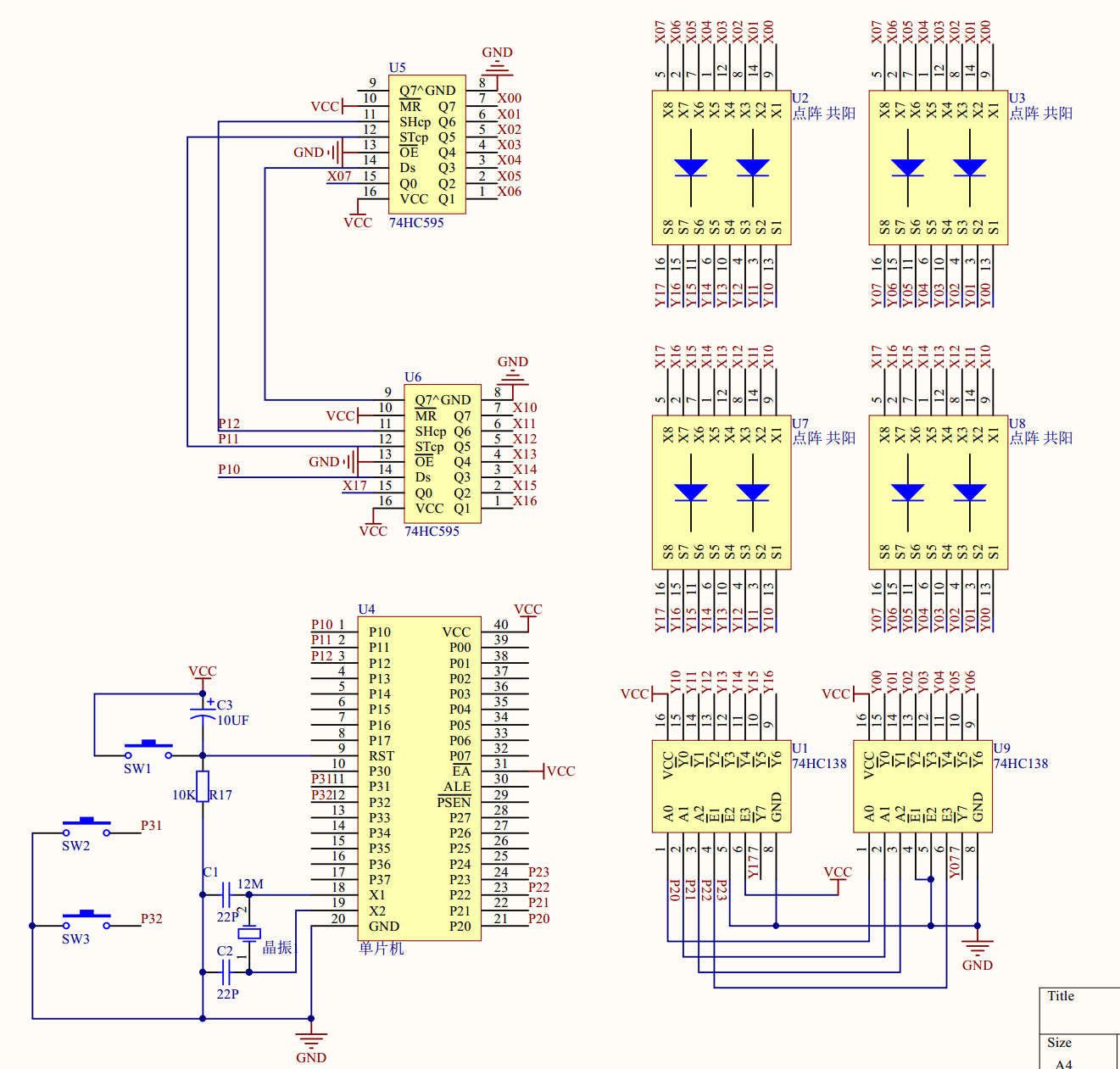
3.2救援机器人核心电路设计
3.3救援机器人外围电路的设计
3.4救援机器人硬件电路总体设计
4 救援机器人系统软件设计
4.1程序的开发环境的介绍
4.1.1 Keil uVision2开发环境介绍
4.1.2 STC_ISP_V483烧录软件介绍
4.2救援机器人各模块程序设计
4.2.1 HC—SR04超声波测距模块的函数设计
4.2.2 HC-05蓝牙模块程序设计
4.2.3 ULN2803直流电动机驱动模块程序设计
4.3救援机器人总体程序设计
5 总结
6 参考文献
参考文献
[1]谭浩强.《C程序设计》(第四版).北京: 清华大学出版社, 2010年6月
[2]陈杰. 黄鸿.《传感器与检测技术》(第二版).北京: 高等教育出版社,2010年1月
[3]阮毅. 陈伯时.《电力拖动自动控制系统-运动控制系统》(第四版).北京: 机械工业出版社,2009年8月
[4]张迎新.《单片微型计算机原理应用及接口技术》(第二版).国防工业出版社
[5]郭天祥.《新概念51单片机C语言教程-入门 提高 开发 拓展全攻略》.北京:电子工业出版社,2009年1月
[6]杨武强.《机器人超声避障控制系统的研究》.南昌大学硕士研究生学位论文, 2007年6月
[7]葛先雷.《避障机器人的设计》 .南京化工职业技术学院
[8]王立鹏.《基于AT89S51单片机的智能避障机器人》
[9]徐跃.《基于超声波测距的机器人定位与避障》. 齐鲁工业大学硕士研究生学位论文 ,2013年5月
[10]张凡.《履带式移动机器人的控制与避障》. 南京理工大学硕士研究生学位论文
[11]蒋玉华.《一种矿用无线搜救仪的设计》. 江苏三恒科技集团有限公司: 2011年4月
[12]黄席樾,柴毅,周欣,汪先矩,黄瀚敏.《汽车智能辅助操作系统中的障碍物检测》.重庆大学自动化学院,2000年7月
[13]刘威.《无线网络技术》.北京:电子工业出版社, 2012年1月
[14]杨军.《无线局域网组建实战》.北京:电子工业出版社,2006年4月
[15]张福学.《传感器实用电路150例》.北京:中国科学技术出版社,1993
[16]黄智伟.《蓝牙硬件电路》.北京:北京航空航天大学出版社,2005年8月
[17]夏路易,石宗义.《电路原理图与电路板设计教程-Protel 99SE》.北京:北京希望电子出版社,2002年6月