


苏ICP备112451047180号-6
基于单片机的智能循迹小车
摘 要:智能车辆作为新时代社会的新产物,同时,以智能车为基础也一并开发出了很多新产品,这两者结合在自动化运输、柔性生产组织等方面已经处于关键位置,并且,人们普遍关注着智能小车的研究与发展。这次的设计以
51单片机为基础的自主循迹小车体系。总体设计、软硬件设计构成了本系统的设计。此外,硬件设计与软件设计还囊括在整体实际方案中。其中有一部分采用的原则是模块化设计原则,拥有着设计简单、易于修改和扩展的优点。
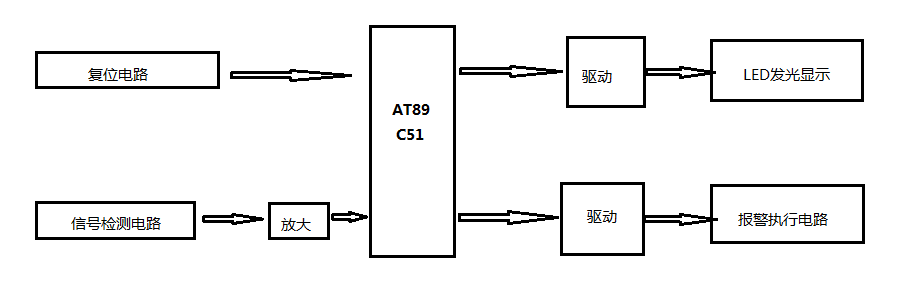
这个设计详细讲述了循迹小车是如何解决轨迹检验跟路线追随的。整个体系将AT89S51视为控制中心,为了经过定时器来中断PWM波形,需要使用定时器T0;为了能够掌控小车的方向和速度,可以调节占空比。使用红外光电传感器对玄色轨迹来进行检验测试,同时将路面检验测试到的信号传输到单片机上,单片机将收集到的信号进行分析和判断,就能够及时有效地掌控机电的转速而来改变调节小车的方向转向,使小车能够自动跟踪沿环形道路的黑色,达到跟踪的目的。
当小车在非黑色线路时,使用蓝牙进行人工蓝牙调控,这就显得小车更为智能,在牢靠的硬件设计供电电池,尽最大化地吧软硬件想结合在一起,从而控制小车,最后达到系统设计所需的条件。
关键词:AT89S51单片机最小体系;光电传感器;蓝牙;循迹
目录
第一章 序言 1
1.1 智能循迹小车的研究背景和目的 1
1.2 智能小车的意义 1
1.3 智能循迹分类 2
1.4 智能循迹小车研究中的关键技术 2
第二章 智能循迹小车的总体设计方案 3
2.1 整体设计方案 3
2.2 系统设计步骤 3
2.3 系统基本组成 3
第三章 系统的硬件设计 5
3.1 单片机电路的设计 5
3.2 电机驱动电路设计 7
3.3 HC05蓝牙控制模块的设计 9
3.4 四路循迹,循迹传感器模块的设计 10
3.5 直流电机模块设计 11
第四章 软件设计 12
4.1 软件设计的流程 12
4.2 定时器中断程序流程图 13
4.3 部分程序设计 14
第五章 系统的总体调试 15
5.1 硬件的测试 15
5.2 系统的软件调试 16
第六章 总结 16
致谢 17
参考文献 18
附录 19
第一章 序言
21世纪的已经来到,科学技术与计算机技术的日益提高,计算机技术已经有了与日俱增的进步,智能循迹小车即具有像眼睛和手一样功用的典范。
1.1 智能循迹小车的研究背景和目的
智能循迹小车,简称为AGV,意思是“主动导引车”,智能小车是通过计算机编程来控制,自动侦查外界环境,从而做出判断行动,它装了自动导引的电磁或者是光学装置,它能够沿着事先规划好的的引导途径行驶, AGV重要的三项技能:铰链结构、能量回馈和发动机拆分技术。
智能小车的组成部分包括单片机,如今单片卫星计算机技术发展已经十分迅速,各个领域都包含了由单片机技术来发的智能化数控设备。随着单片机技术的日益成熟,生产技术水平也得到了大大的提高。单片机具有体积小、重量轻、性价比高的长处,并且单片机已然成为了实现生产工业化前进和开发机电一体化的重要因素。现在的企业也越来越需要熟练掌握单片机技术的优秀员工。
当前,世界上很多国家都在积极主动地进行智能汽车规划的钻研与开发。机器人从无到有,数量从少到多,是移动机器人越来越受到重视的一个紧要分支。智能小车发展速度迅速,从智能玩具行业到其它行业都有着实质性的突破进展。智能小车,是一个综合系统的自动驾驶、规划与决策、环境感知与集成,基本实现跟踪与避障、检测芯片、搜索光存储、避崖等基础功能。
1.2 智能小车的意义
在科学技术的不断提高,社会的不断发展的前提下,人类盼望着可以创造出一种可以代替人类去做危险的事情,或者是要求精度特别高的事情,于是就诞生了科学机器。目前,世界上许多大学和研究所都在积极投入人力、财力、物力,希冀能在特殊条件下建立安全监测体系。其中包含了研究使用无人、远距离的办法来运行实现,如远距离监控、机器人等。随着无线传输的发展,测量变得相对简单,处理速度也越来越快,乃至能够做到实时处理。
智能小车是机器人中具有代表性的典范,它由三部分组成:传感器检测、执行操作、CPU。智能小车,将环境感知、规划与决策、自动驾驶等功效集于一身。智能小车集中运用了计算机、传感、集成、反馈、自动控制等技术,是典型的高新科技代表作。
构建智能循迹小车体系,使我们得到了达到自动控制系统的目的。在时间过程当中,我们应当熟悉以单片机为中心的控制芯片,设计小车的启动驾驶、检验测试与显示等外围电路,选取智能控制算法达到小车智能循迹的要求。为了实现理论与实践的相统一,我们应灵活运用模电等相关学科的理论知识,并联系到实际电路设计的具体方法。在整个过程中,我们可以对控制理论有更为深刻的了解与认识。
1.3 智能循迹分类
AGV从诞生到发展到现今已经经历了50多年,其应用范围不断扩大,种类也越来越丰富。在这里,根据小车行进的导航方式将智能循迹小车分为以下几种:
1.3.1 电磁感应模式
在目前的商业生产中,大中型小车大多数使用电磁感应导航。
电磁感应模式一般都是沿着提前设定好的路线去埋线。当高频电流经过导线时,四周会有电磁场流动,那么安设在AVG小车上的电磁感应传感器接收到电磁信号差别,从而使小车对偏离度作出反应。
1.3.2 激光模式
目前,AGV类型应用较为广泛。在墙壁或路途上或支柱上含有高反射激光定位标记的,装有可以旋转的激光扫描仪的AGV是能够运行的。激光扫描仪发出激光,位置标记周围的背面反射激光束,小车接收操作的车载计算机,而后做出响应,掌管汽车的目前的位置和前进方向,自行处理。
1.3.3 视觉模式
在AGV中,视觉式AGV的发展更加迅速成熟。这种小车并不需要任何提前认为设置路线,可自动行驶,理论上是比较灵活的,在计算机采集图像、存储和处理方面的实用性也越来越强。与图像数据库中的信息相比,AGV小车可以得到车辆的位置和小车分析的下一步。
1.4 智能循迹小车研究中的关键技术
拥有一个综合的环境感知系统,决策、自我驾驶能力的智能汽车,集中地使用了计算器、传感器、信息、通讯、导航、人工智能和自动控制等技术,是可以作为典型的高新技术综合体。在当今社会,一方面,随着城市化的发展和汽车的普及,交通环境变得越来越差,交通问题已经成为一个严重的问题;另一方面,从九十年代开始,计算机、电子、图像处理等技术快速发展,日新月异。这种情况下,将各类先进技术运用到汽车工程中能够提高运载效率,减轻驾驶员劳动负荷,缩小少交通事故的发生率。
多传感器信息在性能上拥有许多长处:(1)增长了体系的长期生存能力;(2)增加了信息的明确性;(3)增强了探测的功能;(4)提高了可信度;(5)扩张了数据收集范围;(6)较少了信息的成本;(7)提高了体系的可靠性。
参考文献
[1]蔡自兴编著.中国的智能循迹小车[J].莆田学院报告,2002,9(3):36-39
[2]杨素行编著.模拟电子技术基础简明教程.第2版.高等教育出版社,2005:532-547
[3]王文华编著.基于80C51单片机的智能小车设计[J].山西电子技术,2010(4):9-10
[4]孙迪生编著.机器人控制技术.机械工业出版社,1997
[5]江思敏,陈明编著. Protel电路板设计从入门到精通.第1版.清华大学出版社,2006:1-296
[6]余孟尝编著.数字电子技术基础简明教程.第2版.高等教育出版社.1999:1-361
[7]徐永权编著.单片机在控制系统中的应用.电子工业出版社.2003.10
[8]安涛编著. PROTEL99入门与提高. 人民邮电出版社.2002.10
[9] 赵茂泰主编. 智能仪器原理及应用. 电子工业出版社.2005.1
[10] 李华. MCS-51系列单片机实用接口技术. 北京航天航空大学出版社