


苏ICP备112451047180号-6
基于三菱PLC控制的搬运机械手设计
摘要:在当今社会,自动化已经越来越频繁的在我们身边出现,而工厂里也开始使用自动化机械来代理人工。搬运机械手正是一种自动化机械,它在流水线上有着举足轻重的地位。我是通过可编程逻辑控制器(PLC)来实现各种指令要求。主要是通过光电传感器检测进料台上是否有物料然后机械手进行取料、移动到出料台、放料,当然完成指令需要一个平台来启动、关闭和监测机械手的工作状态方便自己调节。因此机械手在现代生产的过程中被广泛应用于自动生产线中。尽管机械手没有人工那么灵活,但是机械手可以不断的重复工作和劳动,不知疲劳和危险并且抓取重物。所以机械手受到许多企业的重视,而且被极其广泛的应用。
关键词:搬运机械手;可编程逻辑控制器(PLC);触摸屏;安全快捷
目 录
第一章 引言(绪论) 2
1.1选题背景 2
1.2机械手的发展与现状 2
1.3研究的目的及意义 3
第二章 总体方案设计 5
2.1 系统总体方案的确定 5
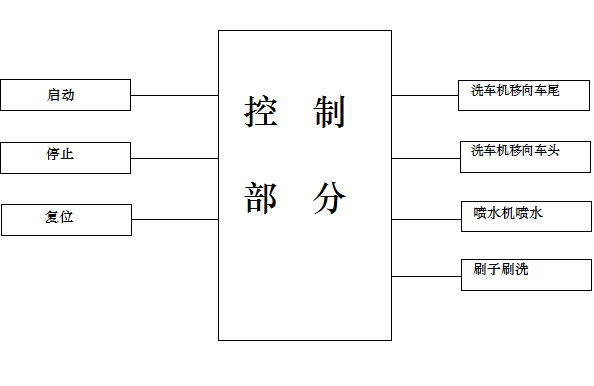
2.2 控制要求 5
第三章 系统硬件设计 7
3.1电机选择 7
3.2传感器选型 9
3.3 PLC选型 11
3.4 触摸屏选型 14
第四章 PLC程序设计 17
4.1 SFC功能设计图 17
4.2信号输入 18
4.3手动过程 19
4.4自动过程 20
4.5警报 23
4.5信号输出 24
结论 25
参考文献 26
致 谢 27
第一章 引言(绪论)
1.1选题背景
在当今社会,工业控制现代化技术被广泛用于各行各业,机械动作的精度还有产品的质量等各方面工艺指标在人工操作下已经很难满足社会要求。因此需要制造出简单的机械关节,简易自由度的零部件生产设备和器械。科学的发展是无止境的,针对单一的动作系统,又提出是否能在构造成型的硬件系统不变的情况下,通过软件编程来实现硬件系统动作的多样化。因此PLC控制的机械设备是必然产生的。
可编程逻辑控制器(PLC)在机械手移动,加工物体以及控制系统中的应用都是基于硬件运用软件编程,系统在整个流水线生产过程中,程序让机械手根据不同的工艺来进行移动或者加工物体。它可以运用在大型工厂或者恶劣环境。它不仅可以节约成本,避免事故,还可以根据环境变化,工艺变化来改变程序,通过改变程序的方法来改变硬件系统的动作,节约了人力财力和物力,很有研究价值。
1.2机械手的发展与现状
目前我国的进口工业机器人主要还是来自欧美和日本等国家,但是随着诸如“工业机器人”类似的具有自有知识产权的企业也不断出现,我也坚信未来将会有越来越多的工业机器人会由中国制造。我国在自动化领域今年来的发展也非常快速,近年来我国一些自主化的工业机器人又在实践应用中迈进一大步,先后研制出了用于工业点焊、弧焊、装配、喷漆、切割、搬运、包装码垛等各种用途的工业机器人以及较为使用的机械手,国内现在的科技主要是研发定制生产冲压机械手、冲床机械手、桁架机械手、数控机床机械手、车床机械手等,并实施了一批机器人应用工程,形成了一批机器人产业化基地,为我国机器人产业的腾飞奠定了基础。
机械手的发展前景和方向:
1.工业机械人在各方面的性能都在不断的提高例如速度变快、精度变高、更具有可靠性、
操作也越来越人性化。
2.机械手的系统结构也在向各种各样的组合发展。例如工业机器人关节模块中的高精度伺服电机、RV减速机、自带检测系统三位一体化:“机器人”由连杆、关节模块用重组方式构建出了机械人的硬件部分;欧美国家已有生产出模块化装配机械手产品问市。
3.工业机械的控制系统都是根据PC机的开放性控制器为基础来发展,这样更便于统一的调节和发展;机器人的硬件软件越来越优良,控制机器人的设备也越来越精密,而且设备也更加模块化:这种改变使系统越来越可靠,越来越容易操作,维修起来也更方便。
4.工业机器人对于传感器方面也越来越需求,机器人的所有关节除了需要位置、速度、加速度传感器外。机械手上也安装了视觉、力觉等传感器,它的作用是装配或者焊接。
5.虚拟现实技术在机械手方面的作用已经从仿真发展到过程控制。例如操纵者遥控机械手在远距离的环境中操纵机械手。
1.3研究的目的及意义
现在的机械手是以古代机器人为基础才渐渐的发展起来的,人类最早对机械手的研究开始于19世纪中叶,机械手方面的技术也随着计算机和自动化技术的发展而不断更新, 1946年第一台数字电子PC机出世代表了自动化技术的开始,随着计算机不断地发展和创新,计算机正向着速度高、容量大、价格低的方向发展。现在的市场需求也是导致自动化技术发展的重要原因之一,这也给机器人的开发和发展奠定了良好的基础。另一方面,在一些危险方面的研究例如核能就需要机械手来代替人工进行危险的操作。为了应对这种方面的需求,美国首先在1936年开发出了遥控式机械手,1946年又开发了机械式的主从机械手。
随着工业的高速发展,工业机器人作为控制领域前沿的产品应自动化设备更新的实时需要,工业机器人已经在实际的工业生产中得到了十分广泛的应用。工业机器人可以运送不同类型的货物、分类不同的物品、来代替人繁重的劳作和重复劳动,完成生产的自动和机械化;工业机器人能够在各种有害环境下保护人身安全例如高温、腐蚀和有毒气体,工业机器人被广泛应用于机械电力、印刷、服务、轻/重工业和核电能等部门。工业机器人适应各类的工业需要,本课题试图开发可编程逻辑控制器(PLC)对物料分拣机械手的控制,系统借助必要的精密传感器,使其能够对不同颜色的物料按预先设定的程序进行分拣,动作灵活多样,适用于可变换生产品种的中小批量自动化生产,广泛应用于柔性生产线。
机械加工这个行业里,机械手拥有以下特点:
1. 可以提升生产线的自动化程度,促使材料的传送、工具的装卸、刀具的使用和更换更加的快捷方便,使劳动效率提高了很多,控制了人工价格,降低了生产价格,提升了生产安全,从而更加的加快了机械向自动化发展的步伐。
2. 在恶劣的劳动环境例如高低温、低压、粉尘、噪声、放射性或者其它毒性污染以及工作环境危险的地方,这样的地方进行直接的人工操作是很危险的,而机械就可以使我们避免这些危害。使用机械手代替人工安全有效地完成作业,很好地改善了工人的劳动条件。
使生产更加的有效率,减少在人工方面的经济浪费,防止货物的积累,更高效更迅速的生产,社会就是在这种状态下高速发展。
结论
本文在分析在机械搬运的基础上,结合电气控制技术、变频技术设计了手动/自动的自动控制系统。本系统采用三菱PLC进行动作控制,三菱控制系统具有程序设计快捷、编程思路清晰、灵活通用、系统维护方便、抗干扰能力强等优点,所以此系统在很大程度上提升了整体的稳定性、安全性、精确性,同时也大大提升了系统的自动化程度。
论文整体可以总结为下面几个方面:
(1)阐述了论文的研究背景及相应技术的发展现状。
(2)对搬运机械手的手动运行、自动运行、故障报警等系统控制做了较详细的分析和阐述,对搬运机械手的变频控制过程也做了相应的介绍和分析。与此同时也设计出了整个控制系统的硬件设计和软件设计。
(3)对三菱PLC进行了简单的介绍,并相应的列举了我国一些知名的PLC生产商,最后绘制出整个控制系统的控制流程图。
(4)大概地介绍了系统的硬件选型。通过实践分析,系统工作时对硬件的要求结合自动化和机械的相关原理,本系统变频器选择了ABB公司工业变频器2.2KW/1.5KW共三台,PLC选择了三菱公司的FX1系列FBS-60MA.。
论文的进一步完善与提高有:
(1)本系统在设计时,只是从模型的角度来考虑,没有到现场进行大型机械化的调试,因此还有待实践。
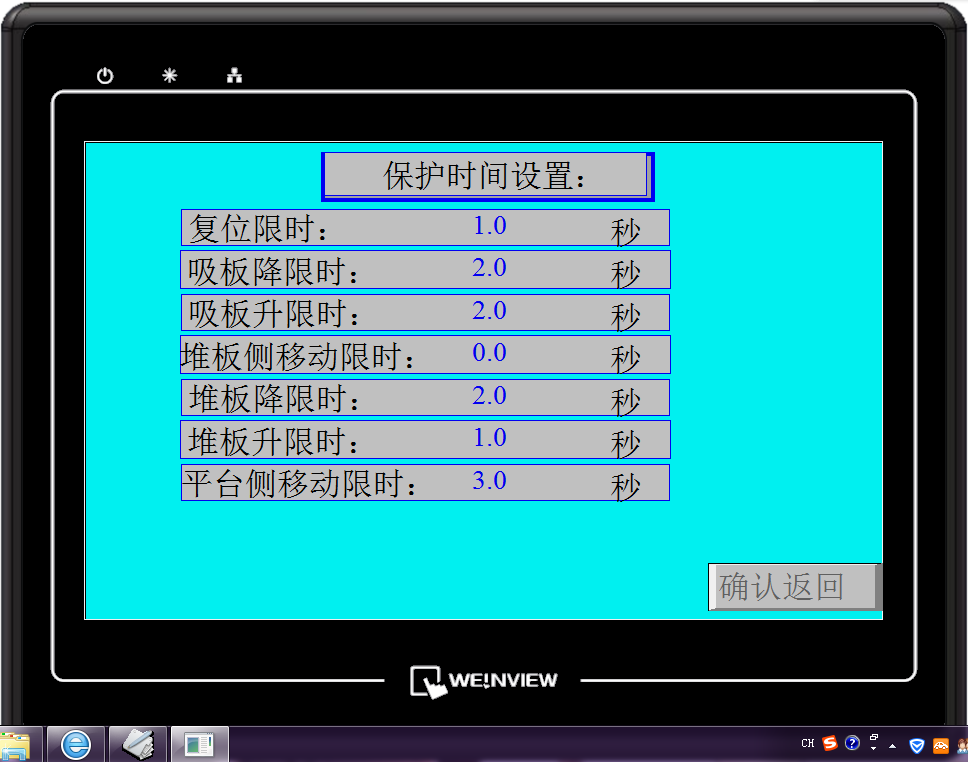
(2)本系统人机界面的设计很简陋,而且关于非测试人员的权限也有待更新。
参考文献
[1] 赵春生,可编程序控制器应用技术,河北:人民邮电出版社2013.7
[2] 朱相磊 冯泽虎,电机与电气控制技术,北京:高等教育出版社2014.9
[3] 郭艳萍 张海红,电气控制与PLC应用,河北:人民邮电出版社2014.7
[4] 袁秀英 石梅香,计算机监控系统的设计与调试---组态控制技术,北京:电子工业出版社2014.12
[5]李亚峰 李方圆,电子电工技术简明教程,北京:机械工业出版社2013.5
[6] 任清晨,电气控制柜设计制作---电路篇,北京:电子工业出版社2014.10
[7] 王阿根 ,电气可编程控制原理及应用,北京:电子工业出版社2014.5
[8] 王又廷,可编程程序控制器原理及应用[M].北京:国防工业出版社,2015
[9] 石国生,电气控制与可编程控制器技术[M].北京:国防工业出版社,2010.