


苏ICP备112451047180号-6
基于MATLAB的码垛机器人运动学分析与仿真
首先进行了背景学问的学习,包括码垛机器人根本学问的理解,明白了码垛机器人的应用环境,国内外研讨趋向,以及码垛机器人中主要触及的关键技术。学习了有关虚拟样机的学问,理解了各种仿真软件的优劣,最终肯定了采用MATLAB停止仿真剖析。学习仿真软件MATLAB。经过实践操作MATLAB软件,并停止大量的实例练习,对软件能纯熟的运用,然后查阅相关材料,明白运用该软件要到达的最终目的,并肯定办法。建立仿真模型。对本文所运用的机器人的构造停止细致理解,并在Solid Works软件中建立出机器人的各个零件的三维模型,并在Solid Works环境中进行了装配,检查了装配结果。然后查阅材料,理解Solid Works与MATLAB软件之间的数据是如何传输的,并肯定本文所运用的传输办法。在仿真软件中处置模型。将模型导入仿真软件中,对其停止相应的处置,停止了修正质量、添加约束等,然后创立驱动函数等操作,最后考证仿真模型。为仿真做好准备。仿真运转及数据丈量剖析。在软件中对机器人停止仿真,并测出其运动特性曲线,并对曲线停止剖析。进行了论文写作。
关键字: 码垛机器人 仿真 MATLAB SOLIDWORKS
通过仿真,得到码垛机器人 末端关节的运动规律,运动规律显示, 码垛机器人 运动有一定冲击和跳动,因此,需要进行调整更改。
值得指出的由于只是仿真试验,添加的驱动规律并非实际应用层面的规律,因此,本文中的运动结果仅仅具有试验参照意义。
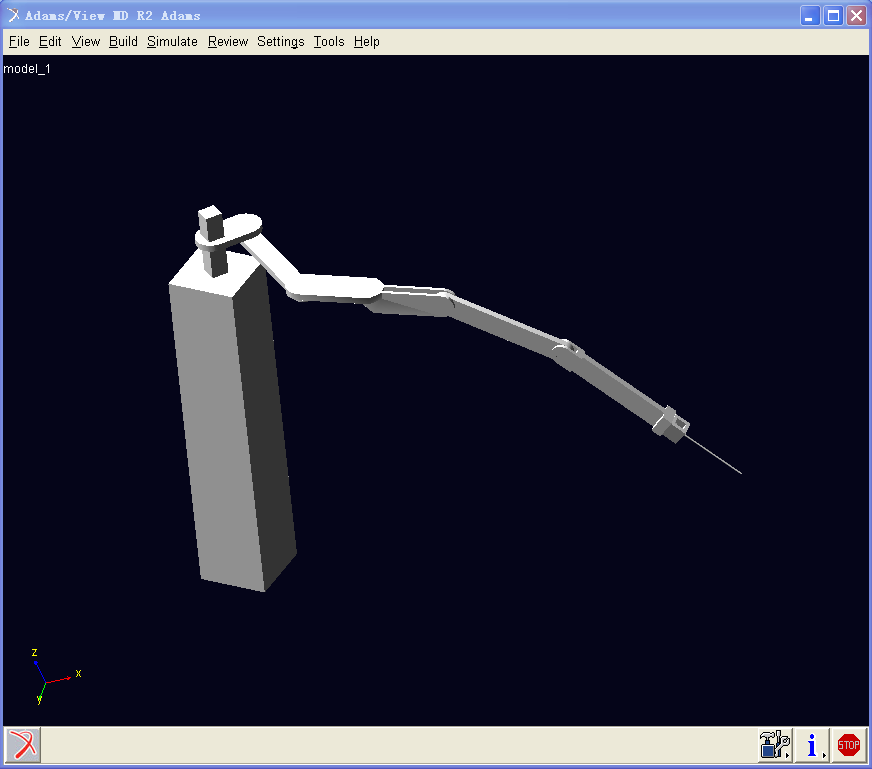
随着机器人研究的深入和发展,虚拟样机技术作为机器人设计和研究的工具,将会发挥越来越重要的作用。针对机器人多样化和智能化的发展趋势,结合激进机器人行业新产品开发周期长、利息高、设计手段落后等现状,论文以外科手术机器人为研究对象,以 SolidW orks和 MA TLA B 软件为依托,对虚拟样机技术在机器人开发中的应用进行了研究。该论文首先介绍了手术机器人的发展及虚拟样机软件,然后基于三维建模软件 SolidWorks 建立手术机器人的简化实体模型,并使用 Parasolid 文件将模型导入 MA TLA B 软件中。 MA TLA B 软件中对机器人模型进行相应的处置,如修改资料属性、添加约束等,然后将在MA TLA B中求出的各关节角随时间变化的点导入到 MA TLA B 并拟合成样条曲线,用这些样条曲线作为机器人各关节的驱动函数进行运动学仿真,并测出机器人运动的一系列参数,例如关节角位移、角速度、角加速度、驱动力矩等,通过对这些参数的研究,可分析机器人的运动是否合理,并为机器人的后续研究提供了理论及数据依据。
本文只提出了基于已设计结果的仿真检验,并没有涉及运动反解,后续的工作中,可以将运动反解和仿真结合起来,为 码垛机器人 优化设计提出具体方法。
首先进行了背景学问的学习,包括码垛机器人根本学问的理解,明白了码垛机器人的应用环境,国内外研讨趋向,以及码垛机器人中主要触及的关键技术。学习了有关虚拟样机的学问,理解了各种仿真软件的优劣,最终肯定了采用MATLAB停止仿真剖析。学习仿真软件MATLAB。经过实践操作MATLAB软件,并停止大量的实例练习,对软件能纯熟的运用,然后查阅相关材料,明白运用该软件要到达的最终目的,并肯定办法。建立仿真模型。对本文所运用的机器人的构造停止细致理解,并在Solid Works软件中建立出机器人的各个零件的三维模型,并在Solid Works环境中进行了装配,检查了装配结果。然后查阅材料,理解Solid Works与MATLAB软件之间的数据是如何传输的,并肯定本文所运用的传输办法。在仿真软件中处置模型。将模型导入仿真软件中,对其停止相应的处置,停止了修正质量、添加约束等,然后创立驱动函数等操作,最后考证仿真模型。为仿真做好准备。仿真运转及数据丈量剖析。在软件中对机器人停止仿真,并测出其运动特性曲线,并对曲线停止剖析。进行了论文写作。
关键字: 码垛机器人 仿真 MATLAB SOLIDWORKS
通过仿真,得到
目 录
1.绪论 1
1.1.研究背景 1
1.2.研究意义 2
1.3.研究内容 2
2.虚拟样机技术 4
2.1.虚拟样机技术的内容 4
2.2.虚拟样机技术与传统CAX(CAD/CAE/CAM)技术的比较 5
2.3.虚拟样机技术的应用 6
3.MATLAB软件 8
3.1.MATLAB的功能概述 8
3.1.1.MATLAB 的一些主要模块 8
3.1.2.MATLAB建模、仿真步骤 9
3.2.MATLAB的建模功能 10
3.2.1.MATLAB中的零件 10
3.2.2.在零件上施加约束和运动 11
3.2.3.给零件施加作用力 12
3.3.MATLAB的分析功能 12
3.3.1.MATLAB中的测量 12
3.3.2.系统元素和数据元素 13
3.3.3.用MATLAB对模型进行仿真 13
4.码垛机器人三维模型建立 14
4.1.SW概述 14
4.2.码垛机器人零件建模 14
4.3.码垛机器人装配 18
4.4.SW与MATLAB数据传递 20
5.基于MATLAB的仿真分析 22
5.1.导入机器人模型及设置工作环境 22
5.1.1.导入机器人模型 22
5.1.2 设置工作环境 23
5.2.修改机器人模型的材料、颜色、名称及验证模型 25
5.2.1.修改机器人模型的材料 25
5.2.2.修改机器人各构件的颜色及名称 25
5.2.3.检查模型 27
5.3.创建约束及驱动 27
5.3.1.创建约束 27
5.3.2.创建驱动 30
5.4.验证模型 31
5.5.仿真控制 32
5.6.运动学仿真 33
5.6.1.仿真过程及机器人末端的运动轨迹 33
5.6.2.机器人末端点的测量 34
6.结论与展望 37
参考文献 39
致 谢 40
参考文献
[1] 王伯华等.医医用手术机器人.机器人技术与应用, 2001年第4期
[2] 李旭等.医疗机器人研究的最新进展.机器人技术与应用,2003年第4期
[3] 杜治江等. 医疗机器人发展概况综述.机器人ROBOT,2003年3月 第25卷第2期
[4] 杜治江等. 外科手术机器人技术发展现状及关键技术分析.哈尔滨工业大学学报,2003年7月 第35卷第7期
[5] 曹毅,显微外科手术机器人工作空间分析与综合,[博士学位论文],天津大学,2005
[6] G.S.Guthart,J.K.Salisbury,Jr.The Intuitive/sup TM/telesurgery System:Overview and Application.IEEE International Conference on Robotics andAutomation,San Francisco,CA April 2000,Vol,1:618-621
[7] 刘达.微创外科机器人若干关键技术研究.北京航空航天大学.博士论文.2003
[8] 王树新,丁杰男,李群智,韩宝平.显微外科手术机器人——“妙手”系统的研究.机器人.2006(3):130-135
[9] 赵永涛,王田苗,胡磊,用于髓内钉远端锁钉手术的矫形外科机器人系统,机器人,2005,
[10] 李群智,机器人辅助显微外科手术系统的研究与开发. 天津大学.硕士论文.2004
[11] 郭卫东. 虚拟样机技术与MATLAB应用实例教程. 北京航空航天大学出版社,2008
[12] 郑凯 胡仁喜 陈鹿民.MATLAB 2005机械设计高级应用实例.北京:机械工业出版社,2006
[13] 范成建 熊光明 周明飞.虚拟样机软件MSC.MATLAB应用与提高. 机械工业出版社 ,2006
[14] 邬勇,虚拟样机技术在机构精度分析中的研究与应用 湖南大学硕士论文.2004
[15] 李军 邢俊文 覃文洁. MATLAB实例教程. 北京理工大学出版社,2002
[16] 郑建荣 MATLAB—虚拟样机技术入门与提高.机械工业出版社,2002.
[17] 李康 介入式手术机器人机械结构设计及运动学仿真 哈尔滨工业大学 硕士论文.2006
[18] 陈新荣 基于虚拟样机的机器人控制仿真软件系统研究与开发 北京工业大学 硕士论文.2003
[19] 余峰 基于虚拟样机技术的专用机器人动力学研究 兰州理工大学.硕士论文.2003
[20] 王国强 张进平等 虚拟样机技术及其在MATLAB上的实践 西北工业大学出版社 2002
参考文献
[1] 王伯华等.医医用手术机器人.机器人技术与应用, 2001年第4期
[2] 李旭等.医疗机器人研究的最新进展.机器人技术与应用,2003年第4期
[3] 杜治江等. 医疗机器人发展概况综述.机器人ROBOT,2003年3月 第25卷第2期
[4] 杜治江等. 外科手术机器人技术发展现状及关键技术分析.哈尔滨工业大学学报,2003年7月 第35卷第7期
[5] 曹毅,显微外科手术机器人工作空间分析与综合,[博士学位论文],天津大学,2005
[6] G.S.Guthart,J.K.Salisbury,Jr.The Intuitive/sup TM/telesurgery System:Overview and Application.IEEE International Conference on Robotics andAutomation,San Francisco,CA April 2000,Vol,1:618-621
[7] 刘达.微创外科机器人若干关键技术研究.北京航空航天大学.博士论文.2003
[8] 王树新,丁杰男,李群智,韩宝平.显微外科手术机器人——“妙手”系统的研究.机器人.2006(3):130-135
[9] 赵永涛,王田苗,胡磊,用于髓内钉远端锁钉手术的矫形外科机器人系统,机器人,2005,
[10] 李群智,机器人辅助显微外科手术系统的研究与开发. 天津大学.硕士论文.2004
[11] 郭卫东. 虚拟样机技术与MATLAB应用实例教程. 北京航空航天大学出版社,2008
[12] 郑凯 胡仁喜 陈鹿民.MATLAB 2005机械设计高级应用实例.北京:机械工业出版社,2006
[13] 范成建 熊光明 周明飞.虚拟样机软件MSC.MATLAB应用与提高. 机械工业出版社 ,2006
[14] 邬勇,虚拟样机技术在机构精度分析中的研究与应用 湖南大学硕士论文.2004
[15] 李军 邢俊文 覃文洁. MATLAB实例教程. 北京理工大学出版社,2002
[16] 郑建荣 MATLAB—虚拟样机技术入门与提高.机械工业出版社,2002.
[17] 李康 介入式手术机器人机械结构设计及运动学仿真 哈尔滨工业大学 硕士论文.2006
[18] 陈新荣 基于虚拟样机的机器人控制仿真软件系统研究与开发 北京工业大学 硕士论文.2003
[19] 余峰 基于虚拟样机技术的专用机器人动力学研究 兰州理工大学.硕士论文.2003
[20] 王国强 张进平等 虚拟样机技术及其在MATLAB上的实践 西北工业大学出版社 2002