














��ICP��112451047180��-6
��ˮ�ݻ��ṹ���
ͨ����1.1�Ķ��ձȽϺ���Է���,���г�ˮ�ݻ�е��Ҫ���������ص㣺
��1�����Ʒ�ʽ���ܴ�һ����dzˮ���ո���и����ľ��幤���ǿ�Һѹ�����Ƶģ�Һѹ�����ʺ��ڴ�����ص��豸����Ҫʵ�������ִ��������ܾ�Ķ���أ�����Ŀ����и�Ĺ�����������ʹ�ÿռ�Ƚϴ����豸�������������ʺ���С���豸��
��2��������ʽ������ˮƽ���������и���dzˮ�и�Ϊ���ӣ�Ӧ����ʹ�����ʽ�ƽ������Ծ����ܿ��Ƶķ�ʽ����ˮ��ֲ��ľ�����һ����˵��������Ӧ�ð�װ�ڴ����һ�ࡣһ��ʽ��������һ���ʺ�������ͳ��ֻ�ķ�ʽ�����ʺ��и���ˮ��ֲ���ˮ�塣
��3���и������ͣ��������˾ʹ�ð�װ�ڴ���ǰ����и������и���������С����ˮ�����ܵ���ˮƽѹ���ϵ͡�����һ���ʺ����ֹ�������ʹ�õ�Сװ�ã���ת�ĵ�Ƭ���������ˮ��ֲ�ﱻ���Ƶ����⡣
���ϱ����Կ��������е�ר��ˮ���ո�����������С���ߴ���ʺϴ��ͺ�����ҵ���ܣ�����һ�廯��
1.2.3��ˮ�ݻ��ķ�չ����
��1��С�ͻ������ڴ��ͳ����ij�ˮ�ݣ�Ŀǰ�г��ϵ������ˮ�ݻ����д���֣��ʺ�����ˮ����ҵ������ˮ������С�ġ�dz�ġ��ܼ��ֲ��ĺ߶���ɢ�ġ�����������£�������Ҫ�ҵ���õĵ͵س�ˮ������ʵ��Ϊ�ͻ���С��͵ص����������⣬����Խ���רҵˮ���ո����һ����Ҫ�ķ�չ���ơ�
��2���Զ�������ˮ��ҵ��Ŀǰ�Ѿ����г�����صĻ�е�ʹ�ֻ������ʹ�ã�Ȼ������Ҫ���ֱ�ӿ��Ʋ�������Ҫ��Լ�����˲�����һ����ģʽ�������ڷ��ˮ��ʹ�õij�ˮ�ݻ���Ҫ����ijߴ����������ӵ�̲Ϳ�����⣬�Ӳݿ��ƺ��ռ�װ�ÿ���װ��ͬһ��ˮ���ϣ�Ҳ����װ�ڲ�ͬ��ˮ���ϣ��Ա����ǿ���һ��������ˣ����ŵĿռ������ġ�
ˮ���ո���ķֲ���װ��ƣ�ʹ��ͬ���͵�ͣ��֧�ܿ������κ����͵Ĵ�ֻ��ϡ�����ͬ���͵��ո��������ר�ŵ��豸ʱ������ֻ�������д�ֻ����Ҫ�IJ���������װ�����д��ϣ��ⲻ������������ɱ������һ������˴��ijߴ硣����Щ�����£��������Աȴ�ֻ���������ϣ����һ��ܼ���ȡ�����ý�չ��
һ��ѡ���Ŀ�ĺ�����
���ڵ�ǰ�ij��л��������У�ˮ��̬���۵Ŀ�����Ϊ��Ҫ�����������Ĺ滮��ͳ�ƣ�10������й����߶������ɵ��˹���������ﵽ1000���ס��˹������������ˮ��������ˮ��dz�����С����ɢ�ȴ���ˣ����ݻ��DZز����ٵġ�Ϊ�������οͣ�һЩ����ˮ���ر���Ƴɲ�������������ڷdz���խ�ĺ������˹��羰���������ո��е������Щˮ��ƽ����ʻ��ת�䡣Ŀǰ���г��ϵĴ��ͳ��ݻ��豸�����ڴ�����ˮ�����ˮ�ݵ��ո�������ڴ����С�ͺ����ͺ�����С�͵ر�ˮ��ˮ��ֲ����ջ������Ҫ�����˹����ɴ˿ɼ������ݻ�����Щ�˹�����ˮ�������Ź�����Ӧ��ǰ����
���Ƶ�С�͡��ɿ��ٲ�ж�ij�ˮ�ݻ���������Ч�������С��ˮ����˹��ջ���Ч�ؼ������Ṥ�����������ջ�Ч�ʡ����ٿɲ�ж�����ʽˮ���ո����ͨ���̶�װ�����κ����͵Ĵ�ֻ��ϡ����û���Ҫ���ʱ�����Կ��ٰ�װ��������Ҫʱ���иԪ���Կ��ٲ�ж���Ա����ڿ��Ż����ж��ռ���Ԫ����ʴ�����ӳ���ʹ���������ⲻ�������˳ɱ������һ���������ά�ص��㼣��ʹ�豸��ʱ������ά������������Щ�������������ٲ�װ���dz�ˮ���ݻ�е�����÷�չ����
�����������������1000�����ң�����Ҫ�ο�����Ӧ��
������2019��6��1�յ�˶ʿ��ҵ���ġ�����ˮ���ո�и�—����—ι��ϵͳ����������о����н���ˮ�������ѡ��Ͱ�«έ���Ѽ�����ѧʵ�飬�������ж�����С�����뵾��ո��ж������жԱȷ�������ˮ���ո�ղ�ʱ�����ص���з�����������ˮ���и�����ϵͳ��ѹ��������ι��ϵͳ�ṹ��������άģ�͡������ʹ���ϵͳ��ȷ���˸�̨����������װ�õ���Ҫ������ͨ����ϵͳ������ع����µĹ��ʼ��㣬ѡ��Һѹ��������ٻ���ͨ��������ͬ���������½���������Ť�ش�С�������书�����ģ�����Ӱ�칦�ĵ���Ҫ���������������Ľ���ʩ��ʹ��ANSYS����Ԫ����ѧ������������װ�û����ڻ��������и���ȵĹ�������������λ�õ�ǿ����նȣ���֤�ṹ��ƿɿ��ԡ�
����ڡ�«έ�ո�ؼ�������������о���������һ�ָ�Ч�������ո�«έ���ո������Ҫ�ɴ��塢��̨����έ��������έ���������ʹ���Һѹ����ϵͳ������ϵͳ����ɡ����豸����Һѹϵͳ���Ƹ��������������ʵ�ֲ�ͬˮ����ҵ����ˮװ�������ڸ�����и���ҵ������Ч�ر��������ĥ�𡣷�έ����έ�Ȼ����ĺ�����ƿ���ʹ«έ�����ոƽ�����ͣ���έ�ֿ��Ա�֤«έ�������̷š���������ƺ�Һѹϵͳ���ϣ��ܹ�ʵ�ָ�Ч�����ջ���ҵ���Ⲩ�ڡ�������ϵ�����ˮ��������ҵ��ϵͳ�о�����ơ��������һ�ֺ�з��ֳ��ˮ��������ҵ�����ô������ֶ���ң�غ��Զ���ʻ���ֿ��Ʒ�ʽ�����е���ϵͳ������ϵͳ����λ�����ϵͳ����ϵͳ�����ö���������ˮ�������Ļ�е�������о�����߶�λ���ȵļ��������������˶�λ������Ͳ���ԭ��������˻���RTK-GNSSϵͳ���������ϵͳ����ϵ���ϵͳ�������ϵ���ϵͳģ�ͣ����ÿ������˲�����ϵ����źŽ����˲���������ϵͳ���ֶ���ң�ء��Զ����ֲ�����ʽ������Զ���ʻ������˺���ȱջ����ơ�ѭ���㷨���ٶȺ�ת����ԣ�������PID�Զ������㷨������˻���ARM11��ˮ��������ҵ��Ƕ��ʽϵͳ���������Ӳ����ϵͳ������Ӧ��������
�ڶ�ǰ����ˮ���ո������������о���ʹ�ҵĿ������˺ܶ���Բο������ݣ�����û����Ծ��������г��ֵ����ʵ͵��������������о�����˱��ľ����о���ֵ��һ������ʵ���塣
���������
1ǰ��
1.1�������о��ı�����Ŀ��
1.2��ˮ�ݻ����о���״2��ˮ�ݻ�������ȷ��
2.1��ˮ�ݻ������Ҫ��
2.2��ˮ�ݻ��Ĺ�������
2.3��ˮ�ݻ��Ľṹ�����ⶨ
3��ˮ�ݻ��ijߴ�������������
3.1�����������
3.2ƫ���ֵ����У��
3.3����������4�������
4.1���������Ľ���
4.2�������ǿ�ȷ���5����
�ġ��о����������輰��ʩ��
�о����裺
��1��ǰ��������ȷ�����о������ƶ��о��ƻ�������������ϣ�ʵ�ؿ��죬�˽�TOSA�Ĺ�����ʽ������ϵ��������ա��鶨������١�
��2��д���������뿪�ⱨ�棺�����ռ�����������ϣ���ָ����ʦ��ѯ��������
��3������д��ͨ�����ռ��������Ͻ��������������ʦ�Լ�ǰ�˵��о��ɹ��������ij����д���ٸ���ָ����ʦ����������ģ����ն��塣����������ݣ������������Ĺ��շ�������֤���շ����������ȷ�ԡ���������������֤��������Ŀ����ԡ�
�塢���Ȱ���
�����ֹ���ڹ�������
12021.11.20——2021.12.3�������ϣ������о����ⶨ�����о����ݺ�ʵ�ֵĹ��ܣ�����д����٣�д���ⱨ�档��ʦ�ټ�ѧ����̸���������Ŀ���ָ��������ⱨ��д��ע�����ѧ���������ף��ܽ���������д����٣���ʦ�����Ĵ�٣��������Ľṹ����ɿ��ⱨ��
22021.12.4——2022.3.11������ƣ�����ƺ������ģ����ڼ�顣�����ָ����ʦ��ѧ��Ҫ������������ʦָ����ѧ��������ʦ��Ҫ������ϵͳ��������
32022.3.5——2022.3.11���ڼ��
42022.3.12——2022.4.10��ơ�������ɺͶ��塣����ѧУ���ĸ�ʽҪ��������ĸ�ʽ���Ű棬�γɶ���
52022.4.11——2022.4.22��ƺ���������������ѧ�������IJ��ز��ύ����ѧУҪ��IJ��ر��棬�ظ��ʿ�����30%���ڡ�ָ����ʦ��������ʦ�����Ľ��������γ���������ͳɼ�
62022.4.23——2022.4.30��ҵ���ģ���ƣ���硣ѧ�������б������ϣ������㱨PPT������ѧԺͳһʱ��Ҫ��μӱ��裨���ģ����
72022.5.1—2022.5.30���ĵ������������浵
������Ҫ�ο�����
[1]�����,������,������,ëӪ.������ֳˮ���Զ��ո�װ�������ʵ��[J].ũҵ������װ��,2019(12):107+112.
[2]����.����ˮ���ո�и�—����—ι��ϵͳ����������о�[D].���մ�ѧ,2019.
[3]������,������,��־��,������.ˮ���ո���ڲ�ͬˮ���е�Ӧ���뷢չ[J].��е�������Զ���,2018(06):217-219.
[4]�̼̱�,�ӵ�������ˮ���и�װ��.����ʡ,�ߺ��´����̻���������˾,2018-02-16.
[5]���.«έ�ո�ؼ�������������о�[D].�ӱ�ũҵ��ѧ,2014.
��,2017,14(34):123-125.DOI:10.16660/j.cnki.1674-098X.2017.34.123.
[6]��С��.����ˮ���ո�����ܶԱ�[J].ũ�Ҳ�ı,2020(22):88-89.
[7]����,������,������.����CFD��ˮ���ո�̨ˮ��������ֵģ��[J].ũ�����о�,2020,42(09):12-17.DOI:10.13427/j.cnki.njyi.2020.09.003.
[8]�����,ˮ���ո�װ�õĿ���.�ӱ�ʡ,�ӱ�ũҵ��ѧ,2014-02-26.
[9]�Ⲩ.������ϵ�����ˮ��������ҵ��ϵͳ�о������[D].���մ�ѧ,2016.
ժҪ
�й���ˮ��ֳ�ܲ�����������λ���ڶ���ֳˮ���Լ�����ˮ����Ҫ��ֲˮ����ά����̬ƽ�⡣��Щˮ���е�ˮ�ݶ���Ҫ������һ���߶ȡ����ڴ���С��ˮ��ˮ���dz���ֲ���ɢ���г������еĴ���ˮ���ո��豸���ʺ�����Щˮ����й����������е�С��ˮ���ո��豸�ṹ�ϸ��ӣ��û��ڹ��������ͬʱ��Ҫ�������Ĵ�ֻ���ɱ��ϸߡ�
����������⣬�û���Ҫһ�ֿ���װ����ͨ��ֻ��ˮ���ո��豸�����Ҿ߱�װ�㣬�����۵��ص㣬��������˿��Դ�����С��ˮ����ͨ��ֻ�Ŀɲ�ж��ˮ�ݻ�������ˮ�ݻ�ͨ�����Ƶİ�װ�ܿɰ�װ����ͨ�Ĵ�ֻ�ϣ��ڹ�����ɺ�ɿ��ٲ�ж�Խ���ά��������
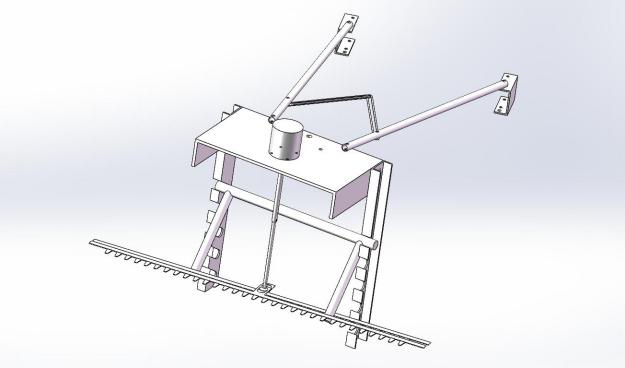
������ڴ�ͳ�ɲ�ж���ʽС��ˮ���ո�װ�õĻ����ϣ�ѡ��ǰ������ʽ�и����������ͻ���Ϊ����װ�ã�����ͨ����������ڵĴ����ᴫ�����и�����ƫ���֣�ƫ���ִ�����������Ƭ���������˶���ʵ���и�ˮ�ݵĹ��ܡ�ͬʱ�и��������ڵ����ϣ����ܰ�װ�ڲ۸ּӹ���֧�Žṹ�ϣ�֧�Žṹ�Ͽ������ۿף��Ա���ڵ��ܵĸ߶ȣ�ʵ���иͬ��ȵ�ˮ�ݵĹ��ܣ������˽Ϲ�����ϵij�ˮ�ݹ�����
�ؼ��ʣ���ˮ�ݻ������ƫ����
Ŀ¼
1ǰ�� 1
1.1�������о��ı�����Ŀ�� 1
1.2��ˮ�ݻ����о���״ 1
2��ˮ�ݻ�������ȷ�� 5
2.1��ˮ�ݻ������Ҫ�� 5
2.2��ˮ�ݻ��Ĺ������� 5
2.3��ˮ�ݻ��Ľṹ�����ⶨ 5
3��ˮ�ݻ��ijߴ������������� 8
3.1ƫ���ֵ������У�� 8
3.2����������� 9
3.3���������� 10
4������� 14
4.1���������Ľ��� 14
4.2�������ǿ�ȷ��� 14
5���� 16
����� 17
��л 18
��ͼ 19
1ǰ��
1.1�������о��ı�����Ŀ��
1.1.1�����
�ڵ�ǰ�ij��л��������У�ˮ��̬���۵Ŀ�����Ϊ��Ҫ���˹������������ˮ��������ˮ��dz�����С����ɢ�ȴ���ˣ���ˮ�ݻ��DZز����ٵġ�Ϊ�������οͣ�һЩ����ˮ���ر���Ƴɲ�������������ڷdz���խ�ĺ������˹��羰���������ո��е������Щˮ��ƽ����ʻ��ת�䡣Ŀǰ���г��ϵĴ��ͳ�ˮ�ݻ��豸�����ڴ�����ˮ�����ˮ�Ͳݵ��ո�������ڴ����С�ͺ����ͺ�����С�͵ر�ˮ��ˮ��ֲ����ջ������Ҫ�����˹����ɴ˿ɼ�����ˮ�ݻ�����Щ�˹�����ˮ�������Ź�����Ӧ��ǰ����
1.1.2�о�Ŀ��
����ר�ü�ˮ�ɲݵĴ���������ĸߣ����ʺ���Сˮ����ҵ����ͨũ�����е���ˮ�ɲݴ��ijɱ���Ŀǰ���г���������ṹ���ӵ�С�ͼ�ˮ�Ͳɲ��豸���û������ڹ��������ͬʱ�蹺������Ĵ�ֻ���ɱ��ϸߡ�����ˮ��̬���۵ķ�չ�͵�ˮ��ֳҵ�����淢չ����ˮ�ݻ�������Ҫ���з����塣Ȼ�����еȵľ���ˮ���ˮ����ֳ�����ж��䱸С������ˣ��о��ͳɱ���С�ͻ������㻯��ģ�黯�Ϳ��ƶ�����ˮ���豸��������ͨ�������ϣ��Դﵽ�����ˮ�ݵ�Ŀ�ģ��Ӷ����ͳɱ�����߸�ݻ�������Ժ������ʡ�
���Ļ�������Ŀ�ģ������һ��С�͡��ɿ��ٲ�ж��ˮ���и�װ�ã�������Ч�������С��ˮ����˹��ջ���Ч�ؼ������Ṥ�����������ջ�Ч�ʡ����ٿɲ�ж�����ʽˮ�Ͳݲɼ�����ͨ���̶�װ�����κ����͵�������ϡ����û���Ҫ���ʱ�����Կ��ٰ�װ��������Ҫʱ���иԪ���Կ��ٲ�ж���Ա����ڿ��Ż����ж��ռ���Ԫ����ʴ�����ӳ���ʹ���������ⲻ�������˳ɱ������һ���������ά�ص��㼣��ʹ�豸��ʱ������ά������������Щ�������������ٲ�װ���dz�ˮ��ˮ�ݻ�е�����÷�չ����
1.2��ˮ�ݻ����о���״
1.2.1�������о���״
��1950����������ȹ����״ο�ʼ�ڽ��кӵ�������ˮ�ݹ����в���ר�õĻ�е�豸��1958�꣬�������̹�˾IHCCOKonijn������һϵ�в�ͬ��ˮ���ջ����Hϵ�С�Mϵ�С�Sϵ�к�FBϵ�С�����ϵ�����в�ͬ�ͺŵ���ƣ���Hϵ��������ɨ���������ֲ�ͬ����ơ���������˾Helder��ʼ����Cress�ո�������о�ˮ���ո�������ڣ�ͨ�����ո����װ��ũҵ������Һѹ�ھ���ϡ��û�����������Ҫ�����ĺӰ��ϣ��ж�ˮ�еĸ����Ӳݺ�Ȼ���ϰ������߸�ݻ���һЩȱ�㣬��Ϊ�Ӱ�������ֲ����ľ�������ܽ����������ڰ��ߣ���Ҫһ�����ں��Ϲ����ĸ�ˮ��������ΪԶ��Ӱ����Ӳ����ռ�����Ϊ���������
1.1�������о��ı�����Ŀ��
1.1.1�����
�ڵ�ǰ�ij��л��������У�ˮ��̬���۵Ŀ�����Ϊ��Ҫ���˹������������ˮ��������ˮ��dz�����С����ɢ�ȴ���ˣ���ˮ�ݻ��DZز����ٵġ�Ϊ�������οͣ�һЩ����ˮ���ر���Ƴɲ�������������ڷdz���խ�ĺ������˹��羰���������ո��е������Щˮ��ƽ����ʻ��ת�䡣Ŀǰ���г��ϵĴ��ͳ�ˮ�ݻ��豸�����ڴ�����ˮ�����ˮ�Ͳݵ��ո�������ڴ����С�ͺ����ͺ�����С�͵ر�ˮ��ˮ��ֲ����ջ������Ҫ�����˹����ɴ˿ɼ�����ˮ�ݻ�����Щ�˹�����ˮ�������Ź�����Ӧ��ǰ����
1.1.2�о�Ŀ��
����ר�ü�ˮ�ɲݵĴ���������ĸߣ����ʺ���Сˮ����ҵ����ͨũ�����е���ˮ�ɲݴ��ijɱ���Ŀǰ���г���������ṹ���ӵ�С�ͼ�ˮ�Ͳɲ��豸���û������ڹ��������ͬʱ�蹺������Ĵ�ֻ���ɱ��ϸߡ�����ˮ��̬���۵ķ�չ�͵�ˮ��ֳҵ�����淢չ����ˮ�ݻ�������Ҫ���з����塣Ȼ�����еȵľ���ˮ���ˮ����ֳ�����ж��䱸С������ˣ��о��ͳɱ���С�ͻ������㻯��ģ�黯�Ϳ��ƶ�����ˮ���豸��������ͨ�������ϣ��Դﵽ�����ˮ�ݵ�Ŀ�ģ��Ӷ����ͳɱ�����߸�ݻ�������Ժ������ʡ�
���Ļ�������Ŀ�ģ������һ��С�͡��ɿ��ٲ�ж��ˮ���и�װ�ã�������Ч�������С��ˮ����˹��ջ���Ч�ؼ������Ṥ�����������ջ�Ч�ʡ����ٿɲ�ж�����ʽˮ�Ͳݲɼ�����ͨ���̶�װ�����κ����͵�������ϡ����û���Ҫ���ʱ�����Կ��ٰ�װ��������Ҫʱ���иԪ���Կ��ٲ�ж���Ա����ڿ��Ż����ж��ռ���Ԫ����ʴ�����ӳ���ʹ���������ⲻ�������˳ɱ������һ���������ά�ص��㼣��ʹ�豸��ʱ������ά������������Щ�������������ٲ�װ���dz�ˮ��ˮ�ݻ�е�����÷�չ����
1.2��ˮ�ݻ����о���״
1.2.1�������о���״
��1950����������ȹ����״ο�ʼ�ڽ��кӵ�������ˮ�ݹ����в���ר�õĻ�е�豸��1958�꣬�������̹�˾IHCCOKonijn������һϵ�в�ͬ��ˮ���ջ����Hϵ�С�Mϵ�С�Sϵ�к�FBϵ�С�����ϵ�����в�ͬ�ͺŵ���ƣ���Hϵ��������ɨ���������ֲ�ͬ����ơ���������˾Helder��ʼ����Cress�ո�������о�ˮ���ո�������ڣ�ͨ�����ո����װ��ũҵ������Һѹ�ھ���ϡ��û�����������Ҫ�����ĺӰ��ϣ��ж�ˮ�еĸ����Ӳݺ�Ȼ���ϰ������߸�ݻ���һЩȱ�㣬��Ϊ�Ӱ�������ֲ����ľ�������ܽ����������ڰ��ߣ���Ҫһ�����ں��Ϲ����ĸ�ˮ��������ΪԶ��Ӱ����Ӳ����ռ�����Ϊ���������
����һЩ��ҵ�ڳ�ˮ�ݻ����о�����ȡ�������õ��о��ɹ�������������ز�Ʒ���Ϻ��������ſ�����gc2230��GC2000ˮ�Ͳݲɼ��豸��20����90���ĩ��������ũ�־ֺ�������ũ���о�������������WH1800��ˮ�ݴ����豸�����⣬���ɹ�ũҵ��ѧ�������9GSCC-1.4ˮ��ֲ���ջ������Щ��Ʒ�����γߴ糬��8�ף��ո��豸ͨ���봬������һ�����е�С�ӻ�ˮ��һ�����С��ˮ��dz���ֲ���ɢ���ȸ�����״��������ˣ����еĴ��ͻ�е�������ڴ���ˮ���ˮ���ո
1.2.2������ˮ���ո�װ�÷����Ƚ�
���ݷ���������ˮ���ո�װ�õ��ص㣬���ݿ�����ʽ������ṹ����ˮ�ݻ����ո������͵Ƚ�ˮ���ո�װ�ý��з��ࡣ
��1.1���������Ƶ�ˮ���ո��豸����
1.2.2������ˮ���ո�װ�÷����Ƚ�
���ݷ���������ˮ���ո�װ�õ��ص㣬���ݿ�����ʽ������ṹ����ˮ�ݻ����ո������͵Ƚ�ˮ���ո�װ�ý��з��ࡣ
��1.1���������Ƶ�ˮ���ո��豸����
|
ˮ���ո��豸�������� |
������ʽ |
���� �ṹ |
��ˮ�ݻ����ո������� |
�ƽ� װ�� ��ʽ |
ˮ���ո��豸�� �����빤���ص� |
||
|
��ʽ |
��װλ�� | ��ʽ | ��װλ�� | ||||
|
Aquatic Companyof USA |
Һѹ |
���� ���� ʽ |
����ʽ |
����ǰ�� |
���� ���� |
����� |
����Ϊ8m������Ϊ3m���߶�Ϊ2m����Լ2t�� |
|
James R.Meclure ofUSA |
Һѹ |
���� ���� ʽ |
����ʽ |
������� |
���� �� ���� |
����� |
�ʺϴ������ˮ���ˮ ��������ҵ�����ʺ�С��dzˮ�� |
|
Jamesl.Hawk ofUSA |
Һѹ |
���� ���� ʽ |
��תʽ |
����ǰ�� |
���� ���� |
����� |
���ðβ�װ����ʽΪ�� Ͳʽ���ո���ռ��ֱ����ڴ� �����ˣ�©���ʽϸߡ� |
|
Jamesl.Hawk ofUSA |
Һѹ |
���� ���� ʽ |
��תʽ |
����ǰ�� |
���� �� ���� |
����� |
��Ϊ�������⣬�и�����Ҫ��װ�ܷ�װ�á� |
|
O'TOOLECB |
Һѹ |
���� ���� ʽ |
��תʽ |
����ǰ�� |
���� �� ���� |
����� |
ͨ��������ʽ�Ľṹ�� ��ˮ������Ӳݽ�ȥ�ո�װ�ã��ʺ�Ư����С��ˮ��ֲ � |
|
Charles |
Һѹ |
���� ���� ʽ |
��תʽ |
����ǰ�� |
���� �� ���� |
����� |
������Ҫ�Ĺ��ʽϴ������Ƚϴ� |
|
������ˮ���� |
Һѹ |
���� ���� ʽ |
����ʽ |
����ǰ�� |
���� ���� |
�ɵ� |
����Ϊ5m������Ϊ2m�� �߶�Ϊ2m����Ϊ4t���������� ��Ϊ30kW��������Ҫ������ҵ�� |
|
�㽭ũҵ��е �о��������� ��ũ�ֹ����� �� |
Һѹ |
���� ���� ʽ |
����ʽ |
����ǰ�� |
���� �� ���� |
����� |
����Ϊ6m������Ϊ3m�� �߶�Ϊ1m����Լ6t���������� �� Ҫ�Ĺ���Ϊ15kW�� |
|
CarlV.olsonof USA |
Һѹ |
���� ���� ʽ |
����ʽ |
����� |
���� �� ���� |
����� |
ˮ���ո���ռ��ֱ� װ��ҵ��������Ҫ�����豸Эͬ�������и����Ľṹ������ ���ϴ���������ˡ� |
|
�Ϻ����� |
Һѹ |
���� ���� ʽ |
����ʽ |
����ǰ�� |
���� ���� |
�����в� |
����Լ15m������Լ5m�� �߶�Լ3m����Լ10t���ʺϴ��ͽ����ˮ�� |
ͨ����1.1�Ķ��ձȽϺ���Է���,���г�ˮ�ݻ�е��Ҫ���������ص㣺
��1�����Ʒ�ʽ���ܴ�һ����dzˮ���ո���и����ľ��幤���ǿ�Һѹ�����Ƶģ�Һѹ�����ʺ��ڴ�����ص��豸����Ҫʵ�������ִ��������ܾ�Ķ���أ�����Ŀ����и�Ĺ�����������ʹ�ÿռ�Ƚϴ����豸�������������ʺ���С���豸��
��2��������ʽ������ˮƽ���������и���dzˮ�и�Ϊ���ӣ�Ӧ����ʹ�����ʽ�ƽ������Ծ����ܿ��Ƶķ�ʽ����ˮ��ֲ��ľ�����һ����˵��������Ӧ�ð�װ�ڴ����һ�ࡣһ��ʽ��������һ���ʺ�������ͳ��ֻ�ķ�ʽ�����ʺ��и���ˮ��ֲ���ˮ�塣
��3���и������ͣ��������˾ʹ�ð�װ�ڴ���ǰ����и������и���������С����ˮ�����ܵ���ˮƽѹ���ϵ͡�����һ���ʺ����ֹ�������ʹ�õ�Сװ�ã���ת�ĵ�Ƭ���������ˮ��ֲ�ﱻ���Ƶ����⡣
���ϱ����Կ��������е�ר��ˮ���ո�����������С���ߴ���ʺϴ��ͺ�����ҵ���ܣ�����һ�廯��
��1��С�ͻ������ڴ��ͳ����ij�ˮ�ݣ�Ŀǰ�г��ϵ������ˮ�ݻ����д���֣��ʺ�����ˮ����ҵ������ˮ������С�ġ�dz�ġ��ܼ��ֲ��ĺ߶���ɢ�ġ�����������£�������Ҫ�ҵ���õĵ͵س�ˮ������ʵ��Ϊ�ͻ���С��͵ص����������⣬����Խ���רҵˮ���ո����һ����Ҫ�ķ�չ���ơ�
��2���Զ�������ˮ��ҵ��Ŀǰ�Ѿ����г�����صĻ�е�ʹ�ֻ������ʹ�ã�Ȼ������Ҫ���ֱ�ӿ��Ʋ�������Ҫ��Լ�����˲�����һ����ģʽ�������ڷ��ˮ��ʹ�õij�ˮ�ݻ���Ҫ����ijߴ����������ӵ�̲Ϳ�����⣬�Ӳݿ��ƺ��ռ�װ�ÿ���װ��ͬһ��ˮ���ϣ�Ҳ����װ�ڲ�ͬ��ˮ���ϣ��Ա����ǿ���һ��������ˣ����ŵĿռ������ġ�
ˮ���ո���ķֲ���װ��ƣ�ʹ��ͬ���͵�ͣ��֧�ܿ������κ����͵Ĵ�ֻ��ϡ�����ͬ���͵��ո��������ר�ŵ��豸ʱ������ֻ�������д�ֻ����Ҫ�IJ���������װ�����д��ϣ��ⲻ������������ɱ������һ������˴��ijߴ硣����Щ�����£��������Աȴ�ֻ���������ϣ����һ��ܼ���ȡ�����ý�չ��
�����
[1]�����,������,������,ëӪ.������ֳˮ���Զ��ո�װ�������ʵ��[J].ũҵ������װ��,2019(12):107+112.
[2]����.����ˮ���ո�и�—����—ι��ϵͳ����������о�[D].���մ�ѧ,2019.
[3]������,������,��־��,������.ˮ���ո���ڲ�ͬˮ���е�Ӧ���뷢չ[J].��е�������Զ���,2018(06):217-219.
[4]�̼̱�,�ӵ�������ˮ���и�װ��.����ʡ,�ߺ��´����̻���������˾,2018-02-16.
[5]���ı�.ˮ������豸�о������[J].�Ƽ����µ���,2017,14(34):123-125.DOI:10.16660/j.cnki.1674-098X.2017.34.123.
[6]��С��.����ˮ���ո�����ܶԱ�[J].ũ�Ҳ�ı,2020(22):88-89.
[7]����,������,������.����CFD��ˮ���ո�̨ˮ��������ֵģ��[J].ũ�����о�,2020,42(09):12-17.DOI:10.13427/j.cnki.njyi.2020.09.003.
[8]�����,ˮ���ո�װ�õĿ���.�ӱ�ʡ,�ӱ�ũҵ��ѧ,2014-02-26.
[9]����,������,�����,�Կ���,��ΰ��.ˮ���ղ�װ�õ����[J].��е����ʦ,2014(08):26-28.
[10]����ϲ.WH1800�ͺӵ���ݻ�[J].�й�ũ����,2003,(03):10-13.
[11]DanielSmith.Marineweedwaker:USA,6922982Bl[P].2005-8-2.
[14]��ʫ��.SGY-2.5��ˮ�и�ݻ�����ƺ�����[J].ˮ������ʩT��е,1997,19(4):12-15.
[15]����,������,��δ,��.GC2230�ͺӵ���ݱ��ബ[J].�Ϻ��촬,2004(2):22-24.
[16]����Ӣ,��ʿ��,�Ž���,��.9GSCC-114H�ͳ�ˮֲ���ո�����ӵ����[J].ũҵ��еѧ��,2006,37(1):59-62.
[17]���,��Ө,����Ա.С�͵綯��ң�س�ˮ�ݻ�������[J].����ũҵ��ѧ,2010,38(26):14791-14792.
[18]������.С�Ͷ���;����װ�õ����[J].�Ϻ��촬,2008,(4):69-70.
[19]��ΰ��.PLC�������������ռ����ϵ�Ӧ��̽��[J].�齭ˮ��,2001,6(3):35-38.
[20]������,Ф����.ˮ���������̻�е�ּ���Һѹ����ϵͳ[J].����������ѧѧ��,1996,2(1):78-82.
[21]���ָ�.�ںӴ��̴���Ƹ�Ҫ[J].������Ƽ�������,1991,4(1):92-96.
[23]������,�½���,���.SCSGJ-2.6�ͳ�ˮ�ݻ�������[J].����ũ�ֿƼ���ѧѧ��(��Ȼ��ѧ��),2008,36(11):229-234.
[24]�,�س���,��ϣҢ,��.����ʽ�̦���̻������������[J].��ҵ�ִ���,2009,(1):35-37.
[25]�պ���,����,����.������ˮ�����������ռ���[J].�Ƽ�������Ʒ��,2010,(7):3-4.
[26]�Թ���.9SCGC-1.5��ˮ���ո������[J].ũҵ�Ƽ���װ��,2010,198(12):33-34.
[28]�δ�.������ѧ[M].�����ѧ������:2018,05.228.