














��ICP��112451047180��-6
����MCD���������Զ�������װ����ԭ�����
1.�뱾�����йصĹ������о������
����һ�廯���������Ӧ�û�е�����͵��Ӽ�����һ�壬���ż��������Ѹ�ͷ�չ�㷺���ã�����һ�廯�������ǰ��δ�еķ�չ����Ϊһ���ۺϼ��������Ϣ�������Զ����Ƽ��������м�⼼�����ŷ����������ͻ�е�����Ƚ����ϵͳ������
Ŀǰ���������г������������һ�廯��ƽ��������ָ��ϸ��ƽεĻ���һ�廯��ƣ���Ҫ�����ϸ��ƽι����л�е��������Һѹ�ȶ�ѧ�Ƶ�Эͬ��ơ�MCD����һ�廯���������������ͬ�����ǻ��ڹ��ܿ����Ļ���һ�廯������ƽ�������������ڻ����ĸ�����ƣ�������������������Ļ���һ�廯��ƽ��������
����MCD,�����Ա��������һ�廯ģ�ͣ����������������Լ�ͨ�������ڻ���һ�廯��Ʒ�е��Զ��������Ϊ�ĸ������3D��ģ�ͷ��棬ʵ�ִ����Եļ�����ƣ��ӿ����漰��е�����������������ƶ����Լ��˶��ȶ�ѧ��Эͬ��ͨ����������֪ʶ����ͨ���������������û����������ǵľ��ߣ����ϵ����е���Ч�ʣ�����������ڡ����ͳɱ��������Ƶ�Ʒ�ʡ�MCD����һ�廯ϵͳ�Ľ���Ƶ�ʷdz��ߣ�����������ǿ���ڽ��в�Ʒ���������ϵͳ���С���������ܷdz�ǿ���ɱ�֤��Ʒ��Ƶ�ʵ���ԺͿɿ����Լ��ȶ��ԡ�
MCD�������¼��������ص㣺
��1�����ɵ�ϵͳ��������:MCD��������ϵͳ����ԭ����ٿͻ���Ҫ��ֱ�������ƣ�����ģ��ʹ��е���������Զ��������ܹ�ͨ����ͬ�ķ�ʽЯ�ֺ���������������߸��콻����ƣ�����������̺��ڳ��ֵļ������⡣
��2�����ģ�ͻ����������ķ��棺MCD�ṩ����ʹ�õĽ�ģ�ͷ��棬���ڿ������������Ѹ�ٴ�������֤��ѡ�������������֤�ɰ�����Ⲣ��������ʱ�������ɱ���ͣ�
��3��ͨ�����ܶ����װ����һ�廯����ʵ�����ã�ͨ��ģ�黯�����ã�MCD�ɰ��������������Ч�ʡ������ý���������ɻ�ȡ���ܶ����еĻ���һ�廯֪ʶ��������Щ֪ʶ�洢�ڿ��У����Ժ����á������ù����У���Ϊ�ܹ����ھ���֤�ĸ��������ƣ����Կ�������������ҿ���ͨ������������ƺͷ��ӹ��ӿ�����ٶȡ�
MCD����һ��ȫ�µĻ�����Ʒ�����������������ҵ������Ҫ���ַ�����һ���棬����
����Ŀǰ��δ�õ���һ���г�������Σ��������Ŀͻ��ͷ���ʦ���и�ͬ������Ҫ���ǣ�
����õ��ķ����dz��ã�DZ�ڿͻ����������˷dz�ǿ�ҵ���Ȥ��
2.�������о�����Ҫ���ݼ�������
�о����ݣ�
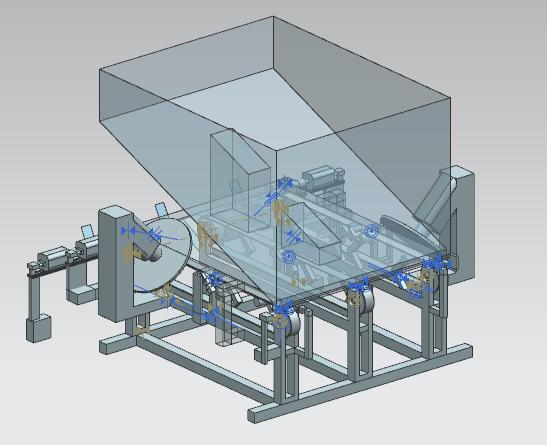
��������Ҫ�о�����MCD���������Զ�������װ����ԭ����Ƽ��˶����棬ͨ��NX���������MCD����������ģ����������Զ�������װ�����м������棬�Ӷ��ܹ���һ��ֱ���������ʾ�������Զ�������װ���ڶ��������Զ������ǹ����и�������˶����ɺ�����ϵ��
����Ҫ���������Զ�������װ���Ľṹ�����˽⣬�ڶ��������Զ�������װ���Ľṹ�˽������£������������Զ�������װ���Ľṹ��������ģ�͡�����ģ����Ҫ�������һ�廯ϵͳ�Ļ������ܣ�ѭ���������ܣ���Σ��ڹ��ܵ������д������ڹ��ֽܷ�Ĺ�������νṹ������ܵ�Ԫ�����á�
����ģ�ʹ�����������Ǵ������ڹ���ģ�͵Ĵֲ�3Dģ�ͣ���ξ��Ƕ�������Ļ������Ժ��˶����������ͣ����ӻ�е�ĽǶ��������������Ϊ������֮Ϊ���������������˶�����ִ�л�����MCD�ṩ������ִ�л������ٶȿ��ƺ�λ�ÿ��ơ�������ִ�л������ö���ִ�л�������β������Ƶģ�ÿ��ִ�л�������Ӧ��һ������ʱ��IJ����������и�������֮���˳���ǻ���ʱ�����ġ�֮�����Ӵ���������������¼��IJ�����MCD��������һ��ȫ�µĶ����Ϊ��ײ����������������¼��IJ������Ƕ��崫���������������������¼������������еľ�����ά��̬���棬ͨ��MCD�ṩ��ʵʱ�۲�������Ŀ�������ʱ�����ڵĿ�������ϵ���˶���ʽ��
�������
1.�Ķ��������й�MCD�����ף������˽�MCD�ķ�չ״����
2.��������NX������MCDģ��ĸ��������Ӧ�ã�
3.�о���MCDģ����صĹ������̺����÷�����
4.���û�еԭ����Ƽ���ѹ����֪ʶ���շ����������ش���������
5.�о�����MCD���������������Զ������ǹ��̣����������������Զ�������װ���ĸ����ڵĿ�������ϵ���˶���ʽ��
3.����������Ҫ��������⣺
�ڱ��εĿ����У���Ҫ�о����ǹ���NX������MCDģ�������������Զ�������װ�����˶��������⡣����������ʵ���͵��о������кܴ�Ŀɱ��ԺͲ�ȷ���ԣ����о��Ĺ����п϶��������������⡣
1.�������о����Ƕ��������Զ�������װ�����˶����棬����Ҫ�Լ����������Ϥ���ã���ο���ʹ�õ�ʹ�õ���NX�����MCD����������ģ�飬����Ҫѧ��ʹ�����ģ������ĸ���������ܣ������ܹ�������Щ���ģװ�����ά�˶����棬Ҫѧ����Щ��Ҫ�����ʱ�䣬ѧ������Щ��ҲΪ������о����ºܺõĻ�����
2.Ҫ�Ի�е���֪ʶ�������ã����о��˿���֮ǰ��Ȼ�Ѿ�ѧ����е���ԭ������ѧ֪ʶ����Ҫ����Щ֪ʶ���õ���ο����������Ҫ��֮ǰ��֪ʶ�ܹ��������ɺ�����������֮���Ҫѧϰ�����������йػ�е�����ص�֪ʶ����ЩҲ����ҪһЩʱ��;����ġ�
3.���ο����о������������Զ�������װ����������Ҫ��Һѹ����ѹ�����������֪ʶ�������գ���רҵ��ѧϰ��ʱ���ѧϰ��Һѹ������ԭ�������֪ʶ��������ƽʱû�и�ϰ���̣��������裬�����Ҫ��ʱ��ȥ��ϰ��ѹԪ������ѹ���ƻ�·���֪ʶ��ֱ�����������֪ʶ�����ش�������������·�ߡ�
4.Ԥ�ڽ���������壺
Ԥ�ڽ����
1.���һ��3000�����ҵĿ��ⱨ�棻
2.���һ������5000�����ҵ�רҵ�������Ϸ��룻
3.��������NX������MCDģ�飬�Ի��������������˽⣻
4.�Ի�е������֪ʶ���˶������˶��������ܹ��������ղ����ã�
5.���������Զ�������װ�����������˶���ϵ������ϵ�ܽ�һ�����⣬����ѹ����֪ʶ���������ã�
6.������NX������MCDģ������������Զ�������װ���Ľ�ģ��װ�估�˶����棻
7.���һ��10000�����ҵı�ҵ˵���飻
8.ͨ�����εĿ����о����ܹ�����MCD����һ�廯���ģ���ڻ�е���ʱ�Ļ��������뷽�����������MCD�ı����ԣ������Ƶ�Ч�ʡ�
���壺
ͨ���Ի���MCD���������Զ�������װ����ԭ����ƵĿ����о��������˽���NX���������ܹ�����������MCD����������ģ����������Զ�������װ����������еװ��������ƽ�ģװ�����ά�˶����档ͬ����������ѧϰMCD���������Ʒ�����������ᵽMCD�ڲ�Ʒ�������ʱ�Ŀɲ������Լ������������ȵ���Խ�ԡ������ܹ����ɶ������֤��Ʒ����ƣ����ܹ�ʵ�ֹ��ܵ�Ԫ��ģ�黯�����ã��Ӷ��ܹ���߲�ƷƷ�ʺͲ�Ʒ�����ٶȡ�������������ƿ���ʱ�䣬��˴����������ƿ����ɱ���MCD������һ��ȫ�µĻ�����Ʒ������������г���������δ��һ��ʱ��������ҵ������Ҫ���ַ���������֮�⣬���ο����о�Ҳ��������ѧ����ʵ������������ߣ����������ǽ��鱾�ϵ�֪ʶ���õ�ʵ����ȥ��һ���治�����������������������������һ����Ҳ������������������ʱ��ʱ�ķ������⡢���������Լ�����������������ˣ����ο����о��������Ժ��߽���ᣬ̤�빤����λ�����˱ز����ٵĹؼ����á�
Ŀ¼
��һ�� ���� 1
1.1 MCD�ķ�չ��״������ 1
1.2���������� 1
1.3���ĵĹ������½ڰ��� 2
�ڶ��� MCD����ģ��Ľ��� 4
2.1 MCDģ�����ɽṹ 4
2.2 MCD��ϵͳ����������� 4
2.3 MCDģ���л�е������ͷ����� 4
2.4��е��͵���������� 4
2.5�Զ�������Эͬ���������� 5
�����µ���װ����������ɼ��˶������� 6
3.1�����ܵĵ����˶� 6
3.1.1����������˶����� 6
3.1.2�������ڵ����˶����� 6
3.2�����ܵķּ� 6
3.3�������Զ�������װ��������ṹ 7
������ ����MCD���Զ�������װ����ά��ģ��װ�� 11
4.1���� 11
4.2����ṹ��ģ 11
4.3����ϵͳ����Ľ�ģ 11
4.4�������Զ��������豸����ѹװ�õĽ�ģ 12
4.5�������Զ��������豸�ĵ���װ�õĽ�ģ 14
4.6����װ�õĽ�ģ 14
4.7�������Զ��������豸����άװ�� 15
������ �������Զ��������豸�˶�������� 19
5.1 �����������Զ��������豸������Ļ����������� 19
5.2 �˶����Ķ��� 20
5.3 ִ�л����ʹ������Ķ��� 22
5.4 װ���ķ����˶� 23
5.4.1 �������еĶ�������� 23
5.4.2 ������������ 24
5.4.3�������еı༭ 25
���� 27
��л 28
����� 29
[]Ф�涫. ����UGNX�Ļ�е��ʽ��άɨ���Ǹ�����Ƶ��о�[D].�ϲ���ѧ,2014.
[] ��ѧ��. ����MCD�İ�װ��ˮ��������漰���ϵͳ���[D].������ѧ,2016.