














��ICP��112451047180��-6
�˸�����ӹ����ռ���Φ13�о����
һ��ѡ���顢����
��ҵ�����������ɱ�רҵ��ѧ�ƻ������һ����Ϊ��Ҫ��ʵ���Խ�ѧ�� �ڣ���ʹ�����ۺ�������ѧ���Ļ����γ̣�����֪ʶ���������ȥ���רҵ��Χ �ڵĹ��̼�����������е�һ�λ���ѵ�� ��
��������ɱ�ҵ��Ƶ�ͬʱ��Ҳ������������ȷʹ�ü������ϣ����ұ��� �й��ֲᣬͼ��ȹ����飬���й��չ�װ��Ƽ����㣬��д�����ļ��ȷ���Ĺ� ��������ҲΪ�����Ժ�Ĺ������¼�ʵ�Ļ�������������Ҫ����Դ�����ۺ��� �����õĻ��ᣡ
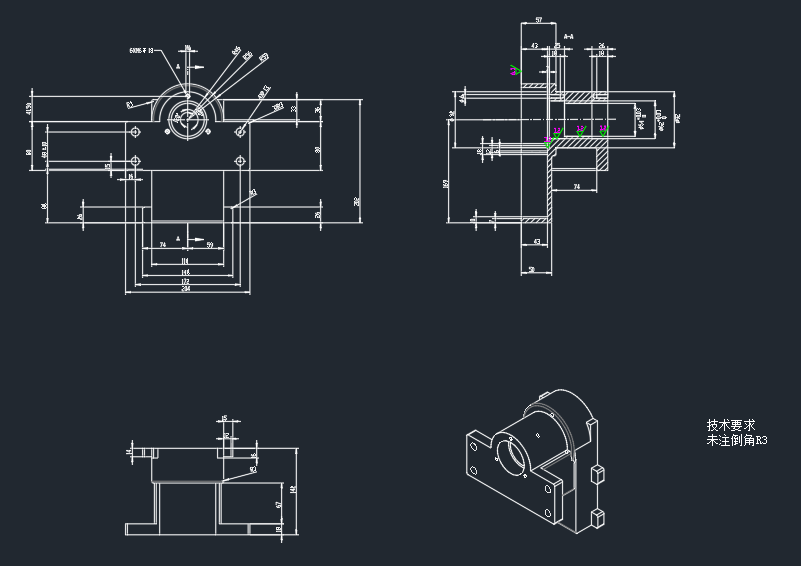
�˸�������ռ���о�������ڷ��������������ܷ�����ã��Ƿ����� ����Ҫ�㲿���������ؼӹ����ռ���װ��������ؼӹ��ĵ��Ͱ�����������ƾ� ����Ҫ���塣
������������ (�����о�����Ҫ�о������ݣ�Ҫ��������⣬Ԥ��Ŀ�꣬�о� ���衢��������ʩ��)
�ñ�ҵ��ƿ����ǽ��ѧУ����ҵ����������Ŀ��һ���֣���Ҫ����˸��� �������������е����ع��չ�װ���⣬�似���ѶȽϵ͡�
һ �����Ϊ�˸�������ռ�ṹ���ӹ���λ�٣��ӹ�����Ҫ���Ǻ�
�ߣ�װ�м����α�ҵ����о�����Ҫ���ݣ�
1�����üӹ�������Ϊ�ӹ��豸���Թ����м���С��ʱԭ��ȷ������· �ߣ�
2�����ݼӹ����� HT150 ���ӹ���λҪ��ȷ������������������
3��Ϊ����װ�й�ʱ��ͬʱ����װ�и������ߵ�·���������⣬����ѡ��װ �е�λ�ã��������ø���֧�ţ������Ӧ�оߡ�
�� �������û�е���칤��ѧ�еĻ���֪ʶ������,�������ʵϰ�е�ʵ�� ֪ʶ,�����ط����ͽ���������⡣�������ϣ��������ͼ������ͼ���еĵ��� ��ͶӰ��ͼ����ߴ��ע�����ϡ��ӹ�����Ҫ�����������ϲ��ļ�������
1.������ѧ֪ʶ��Ƴ��˸�����Ĺ��չ�̡�
2.��ɹ��տ�Ƭ����Ҫ����Ĺ���
3.��ɶ˸���������ơ�
4����д���˵����һ��
Ŀ ¼
ժҪ
��һ�¡��˸�����ķ��� 1
1.1 �˸ǵ���; 1
1.2 �˸ǵļ���Ҫ����� 1
1.3 �˸ǵĹ����Է��� 2
�ڶ��¡�ȷ��ë���ӹ������ͻ���ë����ͼ 3
2.1 ѡ��ë�� 3
2.2 Φ54 ��Բ�ӹ�������ȷ�� 3
2.3 Φ62 ��Բ�ӹ�������ȷ�� 3
2.4 Φ92 ��Բ�ӹ�������ȷ�� 3
2.5 �Ҷ���ļӹ�������ȷ�� 4
2.6 �����ӹ�������ȷ�� 4
2.7 R46 ����ӹ�������ȷ�� 4
2.8 R59 ����ӹ�������ȷ�� 4
2.9 ��ë��ͼ 4
�����¡�����·�ߵ�ȷ�� 6
3.1 ��λ����ѡ�� 6
3.2 ������ѡ�� 7
3.3 �ֻ���ѡ�� 7
3.4 ����ӹ�����ȷ�� 7
3.5 ��Ҫ�ӹ�����ȷ�� 8
3.6 ����·�ߵ�ȷ�� 8
�����¡�������������ʱ�����ȷ�� 10
4.1 �ֳ��Ҷ˶��� 10
4.2 ��ϳ����ϳ����� 11
4.3 �ֳ� R42 ����� 12
4.4 �ֳ� R56 ����� 13
4.5 �ֳ����뾫 φ54 ��Բ 14
4.6 �ֳ����뾫 φ54 ��Բ 15
4.7 �ֳ����뾫 φ62 ��Բ 17
4.8 �ꡢ������Φ 13 �� 19
�����¡��о���� 21
5.1 ���˼�� 21
5.2 ר�üо���� 21
5.3 ����� 23
5.4 �������: 23
���� 28
����� 29
�����
[1]���Ļԣ���������������. ����Ӧ��ṹ�Ļ���
[2]������.�������˻�������Ƽ��߲���߷������о�[D].�Ϸʹ�ҵ��ѧ2009 �˹켣���ٿ���[J].���� �����.2011 (04)
[3]����.������˶��������˶��о�[D].�Ϻ���ͨ��ѧ 2009
[4]��ѩ��.��ä������[D].���������̴�ѧ 2009
[5]������.�������Э������Ʋ����о�[D].�������ӿƼ���ѧ 2009
[6]���Ļԣ���������������.��ȷ�������˵�������켣����[J]. �Զ������DZ�.2010(05)
[7]���ѣ������У�棬������.���� RBF ������Ļ�����³������Ӧ���������[J].�������չ���ѧ Ժѧ��.2009(03)
[8]���������࣬����ȱ���.������Ӧ�ü���[M].�����Ƽ���ѧ�����磬1993
[9]��Ө.�������Эͬ̽����������ͱ��������о�[D].���ϴ�ѧ 2008
[10]����.δ֪�����µĶ������Э���������о�[D].����������ѧ(����)2009
[11]������.�������˻�������Ƽ��߲���߷������о�[D].�Ϸʹ�ҵ��ѧ 2009
[12]��ѩ��.��ä������[D].���������̴�ѧ 2009
[13]����.������˶��������˶��о�[D].�Ϻ���ͨ��ѧ 2009
[14]�����𣬷��������ᣬ��չ��.���ڷ�����ƵĻ���������Ӧ��̬��ģ����[J].�����������Ӧ ��.2010(08)
[15]������.�������Э������Ʋ����о�[D].�������ӿƼ���ѧ 2009
[16]л�����������������������ĸ���ǿ����.����������IJ�ȷ���Կռ����������Ӧ���Ʒ����о�[J]. �ѧ��.2010(01)