














��ICP��112451047180��-6
��������������
ժҪ
Ŀǰ�����������У�һ���µġ�����������ķ���������Ѿ����ֲ���Ѹ�ٷ�չ��������������˵�Ӧ�÷�Χ�ܹ㣬��Ҫ����ά�����������������䡢��ϴ����������Ԯ����ȹ�����ι����������Ϊһ����Ҫ�ķ���������Ѿ���ʼ�������ǵ������У�������ĸ�����е�ֱۿ��Ժܺõİ������꼰������ʿ����Է����⡣�������ܼҾӵĸ����ͻ�е�۵Ľṹ�ںܴ�̶��Ͼ���������ϵͳ�������ܡ���е�۷��ڲ����ϣ�����Ϊ��������������ֻ�е�������ᡢ���С����۾��¡������ռ����ص㡣�����ɶȵ����ʹ�����е�ۣ��������Ի��Ŀ��ƽ��棬ʹ���ֻ�е�ֱۺܺõĴ������ֱ���ɳԷ��ȶ�����
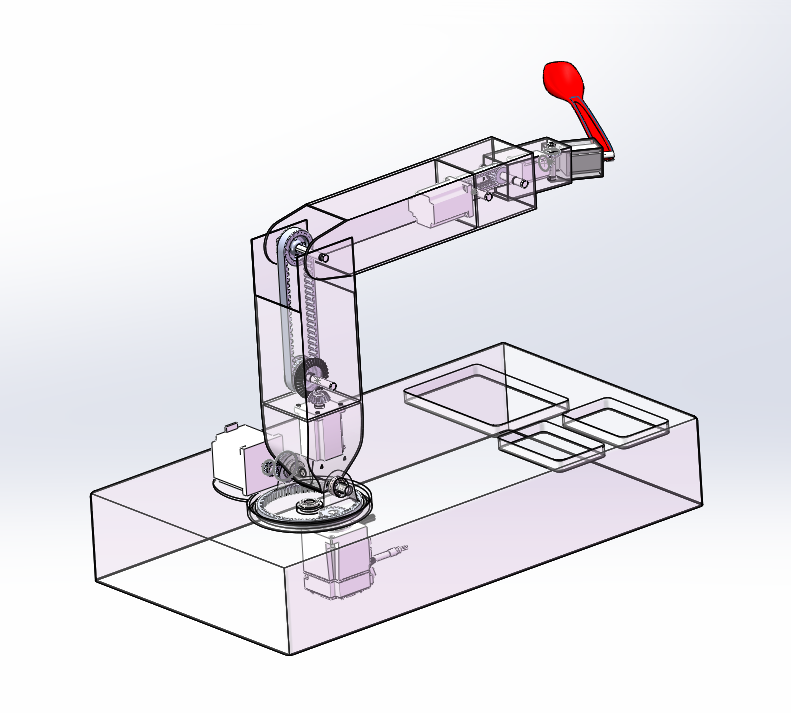
���Ľ�ϻ������˶�ѧ�����ɲ��������۶Ի�е�۽����о�����Ҫ�о��������£����ȣ�����ι����е�۸ն�Ҫ�����ռ����ص�ȷ���ʵ������ɶ����ؽڻ������ͣ�ѡ����ʵĻ�е�۴�������������ṹ���֡���ϻ���ѧ�����滮�����ֹ��ܽṹ��������צ����С�ۡ���ۡ������ȹ���ģ�顣�ۺϿ�����������������أ���ģ�����ֱ۵ľ���ṹ����Σ��Ի����˵��˶�ѧ���з����������˻�е���˶�ѧģ�͡��Ի�е���������Ƽ��㲢��������Ԫ��������Ϲ����ռ�Դ�ۺ�С�۸˳����������˳ߴ��ۺϵõ����ŵĸ˳��������ٴΣ��о���е�۵Ĺ������ܣ��ѻ���������ָ���еĿɲ�������Ϊ�о����������Է�������Ϊ��ҪĿ�ġ�����solidworks��ά��������Ƴ�����ι�������˽����˶����档
�ؼ��ʣ� �������ϣ�ι�������ˣ�solidworks���ɲ����ȣ��˶�����
Ŀ¼
��1�� ���� 4
1.1���ⱳ������Դ 4
1.2����ι�������˹������о���״ 5
1.3������������ 5
��2�� ι�������˻�е�ṹ���о� 7
2.1���� 7
2.2 ���Ҫ�� 7
2.3����� 7
2.4 ��е�۷����������� 8
2.4.1 ���������ɶȵķ���ͽṹ���� 8
2.4.2����ϵͳ�IJ��� 10
2.4.3�������� 12
��3�� ι�������˻�е�ṹ����� 13
3.1��е�۹ؽڽṹ 13
3.1.1�������� 13
3.1.2��е����ת�������——��һ�� 14
3.1.3��е�۴�۹ؽ����——�ڶ��� 16
3.1.4��е��С�ؽڴ������——������ 17
3.2����ؽ���� 19
3.2.1������ؽ����——������ 19
3.2.2С����ؽ����——������ 21
3.2.2ĩ��ִ�л������——������ 22
��4�� ι�������˻�е�ṹ�ļ��� 25
4.1�����˴�۹ؽڲ������� 25
4.1.1�綯����ѡ�� 25
4.1.2���㴫��װ�õ��ܴ����Ⱥͷ������������ 26
4.1.3�������ת�١�ת�غ����빦�� 26
4.2���ಿ�ּ���31
4.2.1���㴫��װ�÷������������ 32
���� 34
����
�����������ϵ�ι�������˾��������ᣬ���С�������ռ����ص㣬��Ϊ�˷����ر��������з��������õ�Ӧ��ǰ������˸û�е�۵���ƾ�����Ҫ���о������ʵ�ʼ�ֵ����������Ի�е������ָ������˻�е�ۻ�еϵͳ�����ƣ������������˶����ܺͿɲ������ܣ���Ҫ�о������ͽ��۹������£�
(1) �ۺϿ����������������ȫ�Ե����أ�����������ɶ�ȫ��ת�ؽ�˫ƫ�ýṹ���û�е�۾������С�������ᡢ�˶��������ռ����ŵ㡣ͬʱ���ڲ����ռ�����˳ߴ��ۺϣ��õ�һ����ŵĸ˳���ϡ�
(2) ��Ϲ�������Ի�е�۵Ĺ����ռ�����˻�����������廮�֣����������ݱ���ͼ�α�ʾ���ϵķ�����ֱ�۵ķ�������е�۹����ռ��ڸ�����IJ������ܡ�
(3) ��ÿһ����е��������м��㣬�������˹����㻹�ǵ�������Ԫ�����������ԶԻ�е������ƣ���CAD�İ����£���Ƹ��ӱ�ݡ�
�Ľ���
(1) ��һ������Ż���е�۽ṹ��������ȫ�Ļ�е��Ƕ��ʽ����ϵͳ��ʵ�ֻ����˵����»���ҵ��������˵�ʵ���ԡ�
(2) �Ƶ���е�۵Ķ���ѧ���о���������Ӧ���ƵĻ����˿����㷨�����ƻ�е�ۿ������ܣ�ʵ�ֻ�е�������˶���ҵ��
(3) ��е�۴�����ϵͳ��Ƽ���Ϣ�ںϼ����о���ʵ�ֻ�е�۶��ⲿ�������ڲ�״���ĸ�֪�������Ӧ���˶����ԣ�ʵ�ֻ�е�۵���������ҵ��