














��ICP��112451047180��-6
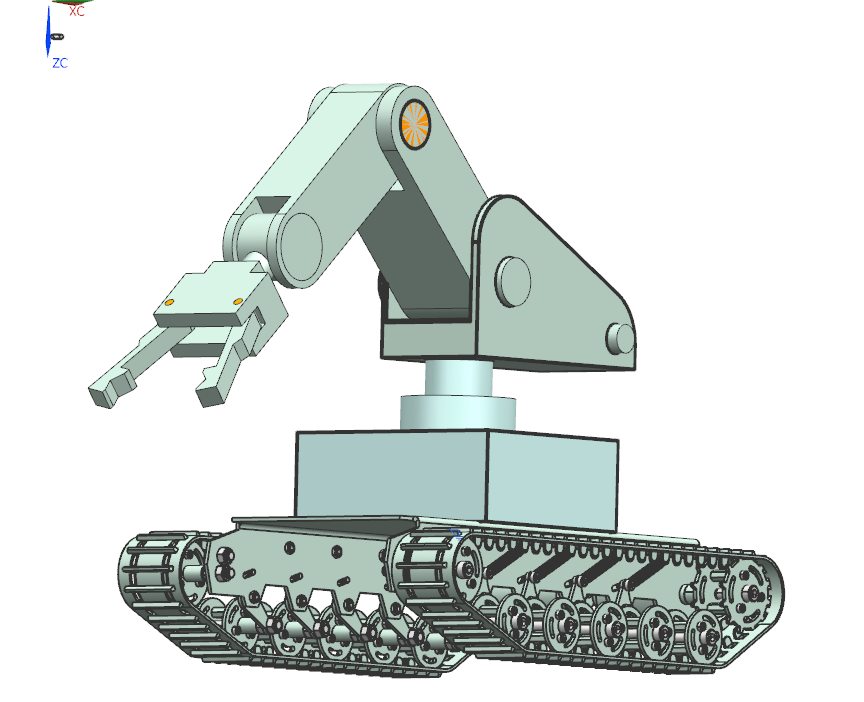
����ADAMS�Ĵ�����е�۵Ľṹ��������
ժҪ
�����ֱ�:���������ۺϿ����ۡ���������ѧ������������Ϻͷ���ѧ�IJ�Ʒ����1959���һ̨��ҵ�������� unimate �������ɹ�Ͷ���������,��ҵ�����˵��������պ�ʹ���������ɼ��Ե��Ӵ�,�ɳ�����������ߵ������˵ķ�չ����,��Ҫ��Ϊ����ʱ��,��ʾ�̸�ԭ���ֽΡ��������˱�̸�ԭ�κ����������˱�̸�ԭ�ν�,��������Ȼ�нϸߵķ�չǰ����������Ҫ����"�����"��С�ͻ����ܻ���е��������Ҫ����:���ݴ�ͳ��ؽڻ�е�۵����������һ�������ϵĹ��͡�Ȼ����������Ƹ������,װ����ɺ�,�ٰ��մ�ۡ�С�ۡ��б۵������������������������Ĵ�����:���� adams ��������,�Ի�е�۹켣�滮�������������ģ��̽��.
�ؼ���:��е�� �Ĵ��� ���ɶ� �ṹ��� �˶�����
Ŀ¼
ժҪ 2
Abstract 3
��һ�� ���� 5
������: 6
�ڶ��� ��е�۽ṹ��������о� 7
2.1��е�۲������� 7
2.2��е���˶�ѧ�ļ��� 8
2.3��е��λ�����������: 8
2.3.1λ�õ����� 8
2.3.2��λ��λ�˵����� 9
2.4��е�۵�������ʽ: 10
������ ��е�ۼ����Ĵ�����UG��ģ 11
3.1 UG�������� 11
3.2��е�۸������������ 12
3.2.1��е�۵ĵ������ 12
3.2.2��е�۲��� 15
3.4װ�� 21
������ ��е�ۼ����Ĵ����ķ��� 25
4.1 Adams�������� 25
4.2��е�۵ķ������� 27
4.3��е����չ�˶� 31
4.4��е��Բ���˶� 34
������ �ܽ� 38
��л 39
����� 40
�ܽ�
���ĵ������ͨ������е�����רҵ֪ʶ��Դ�����ܽ������,���ijһ���ض��Ĺ��ܡ������������Ҫ��Ĵ������ػ���ר�û�е�����,�Ƚ����õ������˴�ѧ��ҵ������������е������о�ˮƽ��ʵ�ʲ������ֵ���������̬��,�߱��˽�ǿ������Ժ���ȷ��ʵʩ����,�ﵽ��������ʵ����ںϡ�
�ȽϺ���������nx10.0���н�ģ���ߴ�Լ�������Ʋ�ͼ�ȡ��ܹ���������Ϊ������ģ�͡����Խ��к�����װ�䡣
���ŵ���adams�����������������˶�����Լ����Ȼ��������е�۵��˶����̣�֮����з�����ͨ�������˽��˻�е�۵��˶�֮����˶���ϵ��Ȼ�����¼�ƣ��õ��˶�����¼��
�����
[1]�շ�. ADAMS �������������ڻ�еԭ����ѧ�е�Ӧ��[J].2005,80(2)
[2]����.���û�е����ѧ���� ADAMS ���и�����ѧ���о�[J].2011,2(10)