














苏ICP备112451047180号-6
浅析多轴同步控制定长送料系统
1.设计(论文)的主要任务及目标
科学技术的发展大大提高了生产力的发展,在工业生产的各个领域,用电机代替复杂的机械结构成为现代发展的一种趋势.本文的主要任务是通过与实际应用相结合,设计出能符合于理论,而又能应用于实际生活中多电机同步控制系统。经过实际生活中的调查,详细的进行分析需求与任务,结合理论知识和资料的查找,最终制定出一个切实可行的解决方案。对于多电机同步的设计,选用了适合控制系统的硬件,理论知识与实际的相结合的方式,这样,既是对学生理论知识的综合考核 也是对学生处理问题能力和分析问题能力的考验。论文详细介绍了从分析实际生活中的问题,并对问题深入的研究与讨论。详细介绍了各个环节的任务和目标以及所得到的成果。设计并能实现多轴同步系统在实际生活中得到应用是该论文的目标。本论文设计的多轴同步控制系统存在着稳定性不高的问题,但是能够基本上满足日常生活的检验与测试,针对系统存在的问题,后续工作的设计开发与维护也是非常重要的,相信经过不断地测试与分析,针对存在的问题实施更好的解决方案,这样才能使系统更加具有实用性。
2.设计(论文)的主要内容
首先,论文论述了课题的突出以及研究意义,随后介绍了设计该课题所用到的理论知识和设计系统的框架结构.第二章开始介绍提出该系统总体的解决方案.首先对该系统的调查研究然后进行系统功能的需求和性能的分析.以及把整个系统划分成几个模块,逐一进行设计与实现.每个模块的功能的实现首先有一个整体的解决方案.接下来第三章进行的是实际设计与理论结构的结合.各个模块之间进行通讯的设计与研究,包括PLC之间的通讯,还对系统的实施监控进行设计,完成上述通信后,进行PC端的设计需要加入PLC编程。第四章详细介绍了模糊控制器于局部之间的协同与控制。模糊控制部分是整个系统的关键部分,在这一章中详细对多电机模糊PI控制的设计思想及实施过程进行了描述,包括对模糊控制变量之间的分析与转化,模糊控制器的结构、隶属度函数、控制规则、和推理算法逐步进行分析与概述。经过前四章的结构分析与需求,系统设计的实施包括软件系统编程与设计,所需硬件信息的选择与配置将在第五章进行详细的实施与组装,在最后对该系统的总结,提出本系统存在的不足之处和改进之处。
摘要
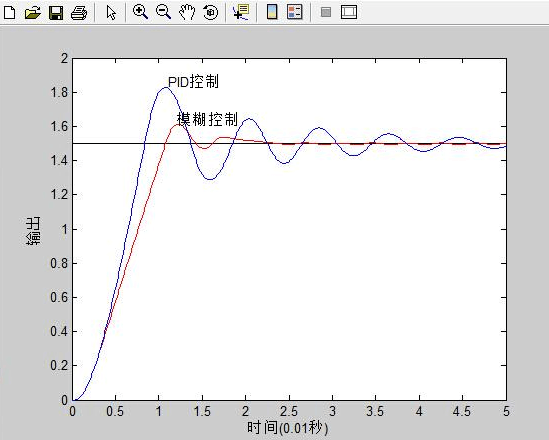
随着科学技术的发展,电机驱动控制方式取代了原本复杂得机械结构运动。多电机同步控制现在大范围的使用在各个工业生产领域,尤其是那些分散布置或者流水线的生产线。该篇论文研究多轴同步控制定长送料以伺服系统和西门子PLC 为核心得问题。在研究该问题前应先对定长送料系统的功能和性能要求进行分析,确定PLC的控制方式、型号并设计程序,然后再根据工业实践中目前使用范围较广的集中组建工业网络的各种方式进行分析,提出以PPI协议实现多台PLC之间的得通讯,为解决多电机的整体控制问题,本文采用PLC编程,编程语言选用VC++来实现以自由口通信技术与上位机通信的相结合。接着研究实现多电机同步精度要求高的局部协同的方法,采用模糊PID控制达到多电机精确同步的需求。在西门子S7-200PLC上实现模糊PID控制,并配合S7-200原有的PID模块和以查表功能实现的模糊控制,设计的该编程实现了对两伺服电机同步运动的控制。最后经MATLAB仿真对模糊PID和传统PID的控制效果进行分析,根据不同的仿真结果进行仔细分析,解决了传统PID控制参数固定造成的局限性。
关键词:多轴同步控制;PLC;模糊PID;伺服系统
目录
第一章 引言(绪论) 1
1.1 课题的提出以及研究意义 1
1.2 多轴同步控制现状 1
1.3 伺服运动控制系统的概述------------------------------------------------------------------6
1.4 模糊PID控制---------------------------------------------------------------------------------8
1.5 论文研究的内容和结构框架--------------------------------------------------------------10
第二章 定长送料系统多轴传动及控制总方案-----------------------------------------------11
2.1 定长送料系统的功能和性能要求--------------------------------------------------------11
2.2 定长送料系统对多轴同步控制的要求--------------------------------------------------14
2.3 定长送料系统整体方案设计--------------------------------------------------------------15
第三章 基于PPI总线的整体协同--------------------------------------------------------------18
3.1 PLC之间通讯-------------------------------------------------------------------------------19
3.2 上位机实时监--------------------------------------------------------------------------------23
第四章 基于模糊PI控制的局部协同----------------------------------------------------------24
4.1 多电机模糊PI控----------------------------------------------------------------------------25
4.2 模糊PI控制在MATLAB中的实现-----------------------------------------------------30
4.3 模糊PID与常规PID比较-----------------------------------------------------------------30
第五章 控制系统软硬件设计---------------------------------------------------------------------34
5.1 硬件选择--------------------------------------------------------------------------------------34
5.2 软件设计--------------------------------------------------------------------------------------35
第六章 总结------------------------------------------------------------------------------------------39
致谢----------------------------------------------------------------------------------------------------40
参考文献----------------------------------------------------------------------------------------------41
附录----------------------------------------------------------------------------------------------------41
附录1-----------------------------------------------------------------------------------------------42
附录2-----------------------------------------------------------------------------------------------42
第一章 引言
1.1 课题的提出以及研究意义
随着自动化技术在我国的蓬勃发展,自动化技术对我国的生产力产生了及其重要的影响,大大提高了我国的生产能力,使得产品的研发与制作更加效率化。在当今社会的这种情况下,对自动化控制的任务和目的提出了更加复杂的要求与实现。很显然,自动化设备的发展仅需一台是远远不够的,为了满足需求与供应则需要多台机器同时运作与控制。协同控制的运作需要采取合理的控制策略与方法,而由于设备需要精准的运作,对各个电机之间的速度、位置要求越来高,因此,如何使电机协同好、控制好增加生产的的效率就显得尤为重要。
现代化工业生产的过程中多电机共同运作协同有着非常重要的作用,特别是在工业生产的各个部门、以及制造业、加工业和印刷业等。在这些领域中,各电机的控制过程需要相互配合和协同,并能够在发生偏差是做出相应解耦,维持内部偏差使得具有原有协调关系。
新鲜思维科学的思考方式人工智能和模糊数学从五六十年代兴起,到七十年代自能控制成为一门专门的学科正式发展起来。另一方面,现代生产方式的加快,效率的提高大部分依赖于控制系统的发展与应用,而且对工业生产控制系统的 要求也越来越高。提高多电机协同控制的精度和可靠性是本文研究的目的与方向,在传统的协同控制系统的基础之上,加入智能控制理论,使用模糊控制技术共同完成多轴同步控制系统。实时监控系统采用S7—200PLC提供的PPI通信协议和其他通信协议。
参考文献
[1] 王永华.现代电器控制及PLC应用技术 [M] 北京:北京航空航天大学出版社,2008.2
[2] 陈瑞阳 张子义 机电控制技术 [M] 北京:高等教育出版社,2010.11
[2] 陈瑞阳 张子义 机电控制技术 [M] 北京:高等教育出版社,2010.11
[3] 龚中华 交流伺服与变频器应用技术(三菱篇)[M] 北京:机械工业出版社,2012.11
[4] 陈先锋.伺服控制技术自学手册 [M].北京:人民邮电出版社,2010,8一10
[5] 舒志兵,袁佑,新周玮.现场总线运动控制系统 [M].北京:电子工业出版社,2007,
[6] 李长兵.基于DSP控制技术的交流伺服驱动器研究 [广东工业大学硕士论文].广东工业大学.2005
[7] 卢志刚,吴杰,吴潮.数字伺服控制系统与设计 [M].北京:机械工业出版社,2007,
[8] 刘淼.多轴同步控制系统及其网络化设计 [华中科技大学硕士论文].华中科技大学.2009.
[9] 刘金琨,孙富春.滑模变结构控制理论及其算法研究与进展 [J].控制理论与用.2007.24.(3)
[10] 戴先中。刘国海.两变频调速电机系统的神经网络逆同步控制 [J].自动化报.2005.31.
[11] 张化光,何希勒.模糊自适应控制理论及其应用 [M].北京:北京航空航天大学出版社.2002.167—169.
[12] 李志勇,程红,赵明宇,高运凯.开放式运动控制系统中多轴位置同步的实现 [J].数字石油和化工.2006.(5).63—65
[13] 张良.基于PROFIBUS总线的多电机同步控制研究 [青岛大学硕士论文].青岛大学.2008.