













��ICP��112451047180��-6
����PLC��˫���е�ֵ����
ժ Ҫ
ͨ���Ի�е������켰����һ�廯רҵ��ѧ�������ѧ֪ʶ�������ϣ��Թ�ҵ��е�ָ����ֻ�е�ṹ���ܵ������ͷ����������һ�ֻ���PLC ���Զ�˫�������ϻ�е�֡��ص���Ի�е�ֵ��������ֱۡ���צ�ȸ����ֻ�е�ṹ�Լ���е�ֿ���ϵͳ�����˵���ơ�ͬʱ��Һѹϵͳ�Ϳ���ϵͳ�����˼����۷����ͼ��㡣����PLC�Ի�е�ֵĿ���ϵͳ����������ϸ�µ���ƣ�ͨ���Ի�е����ҵ�Ĺ��̺Ϳ���Ҫ��ķ���������˿���ϵͳ��Ӳ����·������ϵͳ��ͬʱ�����˻�е�ֵĿ��Ƴ�����ƴﵽ�˵�Ԥ��Ŀ�ꡣ
�ؼ��ʣ���е�� PLC ��е Һѹϵͳ
��ҵ��Ƶ��б���
��ʵϰ�ĵص��ǵ����м��������豸��װ����˾,ʵϰ�ڼ䣬�����еظ��ܵ������첿��һ���Žᡢ�Ͻ������������ļ��塣���������ܵ��������˵İ���������Ҫ�ĵ���������
���е����������Լ��豸��ά������ʵϰ�ڼ����Ҫ���ݣ���ʦ���ǵĴ������ҷɿ�Ľ����ţ����ڻ�е�ͻ����֪ʶ������������Щ֪ʶ���ڽ����������˺ܴ�����á�
��������о������ǻ�е�֣���һ�����ڹ��������ϵĹ�ҵ�����ˡ���ҵ������ϵͳ������������ϵͳ��ɡ�
�����ǣ���е���֣����в��֣����Ʋ��֡�������ϵͳ�ǣ�����ϵͳ����е�ṹϵͳ������ϵͳ��������—��������ϵͳ���˻�����ϵͳ������ϵ�ȵȡ�
�û�е��Ϊ���������ϻ�е�֣�Ҫ���ܹ������������һ�塣
����˳�ӹ��Ⱥ�--��е�ֱ��½�--��צ��£�н��Ѽӹ��õĹ���--�ֱ�����--�ֱۻ�ת��ж�Ϲ�λ--�ֱ��½�--�������ת����צ�ɿ�����--�ֱ�����--��ת���ӹ���λ--�ֱ��½�--��צ�ɿ�����--�ֱ��������ȴ���λ�Ⱥ�е�ֵĶ���ȫ������Һѹ������PLC���ơ�
PLC���ƿ���ʵ�ֻ�е�ֵ��Զ�����ת���ܹ�������ظ��������ַ���Ĺ���
��е�ֽṹ��ƣ�
��е�ṹ������ץȡ��е�����յ�ִ�л������ǻ���������ʵ�ָ����˶���ʵ�壬��е�ṹ�IJ��֡����͡�������ʽ�Լ�����ϵͳ�����ֱ�ӹ�ϵ�Ż����˵Ĺ������ܡ�
��е�ṹ��������ʽ��Ҫ��ֱ�������͡��������͡�Բ�������͡�SCARA�ͺؽ��͵ȡ�
��е���ܴ����������Σ�ա��ظ����ĵĹ��������������Ͷ�ǿ�ȣ�����Ͷ�����Ч�ʡ���е�ֵõ��˹㷺��Ӧ�ã��ڻ�е��ҵ�����������㲿����װ ���ӹ������İ��ˡ�װж���ر������Զ������ػ�������ϻ�����ʹ�ø��ձ顣Ŀǰ����е���ѷ�չ��Ϊ��������ϵͳFMS���������쵥ԪFMC��һ����Ҫ��ɲ��֡�
��Ը������ϻ�е�֣�Ϊ��ʹ������һ���IJ�������ԺͽϺõ�ʹ�����ܣ��ڽṹ����ϲ���Բ�������͡�����������ϵͳ���Ϊ�ĸ����ɶȡ�
�ֲ��Ľṹ��ƣ�
�ֲ�����������Ӵ��IJ���������������Ӵ�����ʽ��ͬ���ɷ�Ϊ�г�ʽ������ʽ�ֲ���Ϊ��ʹ��е�ֵ�ͨ���Ը�ǿ���ѻ�е�ֵ��ֲ��ṹ��Ƴɿɸ����ṹ�������гֹ�����Բ������ʱ��ʹ�üг�ʽ�ֲ������û�е����������;�����гֹ����ǰ���ʱ����ʹ��������ѹʽ���̡�
������漰���������רҵ֪ʶ���������ܹ�����ѧѧϰ����֪ʶ��ֵ�Ӧ�ã�һЩ���������߲�����֪ʶҲ������Ƶ���������������
��е�ֵ���Ƹ�ϵͳ��˵�����ǻ����˵���ƣ������Dz�����������Ʒ��������ж��ͻ�����һ�㣬������ƵĻ�е��ҲӦ��������Ļ�����֪ʶ��
���ڻ�е�ֵ�����ڹ����������࣬���кܶ�Ĺ���ҲӦ���˴����Ļ�е�����ڹ���������е�ֵĹ�����;���Dz�һ���˴������Ҫ�ǽ���е�ֵĹ��ܸ����۸���ͻ���
�䷢չ������������һ�ǻ����˵����ܻ����ഫ����������������Ƚ��Ŀ����㷨�����ӵĻ������ϵͳ��������������ӹ�����ϵ��������Ծ��������Ĺ�ҵ�����ˣ������㹤��Ҫ��Ļ����ϣ���ϵͳ�ľ��á���ࡢ�ɿ����������ù�ҵ��������ģ�黯�г�����Ԫ����
����һ��ʱ����Ҳ����ܺõ������˴�ѧ�ڼ��רҵ֪ʶ������ѧ���˺ܶ���ѧУѧ�������˼ʴ�����ʽ��������֪ʶ�棬Ҳ�ḻ�����������Ϊ�Ҽ���̤�����춨�����õĻ�����
ʵ���ڼ�Ļ�еά����������ҵĶ��������͵���˼������������Ƶ�ʱ�����ܹ�������������кܶ��������Դ�ڴˡ�
ͨ��ʵ������֪���Լ����кܶ����Ҫ�Ľ����ܶණ����Ҫѧϰ��
�����
1 ����������.��е��ƿγ����.2006,���пƼ���ѧ������
2 ������.���紫������.2001�����пƼ���ѧ������
3��һ��ҵ��е����.����ҺѹԪ��������1972
4 ����.Һѹ����ѹ������2006.��е��ҵ������
5������, ����, ���Ҳ�. ����CAN����Һѹ��������˿���ϵͳ�����ʵ��. ������Һѹ. 2003
6 ������, ������. �����Զ������˻�е�ֻ���ϵͳ�о�. ������Һѹ. 2003
��Һѹ. 2003
7 ��ѧ��. �ɱ�̿�����(����ƪ). ����: ���ӹ�ҵ������, 2003.
8 ���, �Ա�, ʩ����. ����PLC�Ļ�е�ֻ����������. Һѹ������. 2005
9���, �Ա�, ʩ����. ���ϰ��˻�е�ֵ�����. ����һ�廯. 2005
10 ���. ����һ�廯����. ����: ��ѧ������, 2004.
11 ������, ����. PLC���������Ƴ�����װװ���е�Ӧ��. Һѹ������. 2005
12����. ���ֿ��Ƽ����������ٴ����ϵͳ�е�Ӧ��. ��������. 2005
13 ���ܾ�, �Դ���. Һѹ����. ������: ���������̴�ѧ������, 2002.
14 ����ƽ. �ִ�Һѹ����Ӧ��220��. ��ѧ��ҵ������, 2004.
15 ���, ������, ����, ������. PLC���Ƶ����������ϻ�е��. Һѹ�������ܷ�, 1999
16 ������, ������, ��ʻ�, ������. ���������ϻ�е�ֵ��о���Ӧ��. ��ѹ��е. 1994
17 ����, ����. װж��е������о�. ��е. 2004
18 ����һ. �λ�Զ��崲��е�ֿ��������. ���ݴ�ѧѧ�����ۺϰ棩. 2000
ժ Ҫ
ͨ���Ի�е������켰����һ�廯רҵ��ѧ�������ѧ֪ʶ�������ϣ��Թ�ҵ��е�ָ����ֻ�е�ṹ���ܵ������ͷ����������һ�ֻ���PLC ���Զ�˫�������ϻ�е�֡��ص���Ի�е�ֵ��������ֱۡ���צ�ȸ����ֻ�е�ṹ�Լ���е�ֿ���ϵͳ�����˵���ơ�ͬʱ��Һѹϵͳ�Ϳ���ϵͳ�����˼����۷����ͼ��㡣����PLC�Ի�е�ֵĿ���ϵͳ����������ϸ�µ���ƣ�ͨ���Ի�е����ҵ�Ĺ��̺Ϳ���Ҫ��ķ���������˿���ϵͳ��Ӳ����·������ϵͳ��ͬʱ�����˻�е�ֵĿ��Ƴ�����ƴﵽ�˵�Ԥ��Ŀ�ꡣ
�ؼ��ʣ���е�� PLC ��е Һѹϵͳ
��ҵ��Ƶ��б���
��ʵϰ�ĵص��ǵ����м��������豸��װ����˾,ʵϰ�ڼ䣬�����еظ��ܵ������첿��һ���Žᡢ�Ͻ������������ļ��塣���������ܵ��������˵İ���������Ҫ�ĵ���������
���е����������Լ��豸��ά������ʵϰ�ڼ����Ҫ���ݣ���ʦ���ǵĴ������ҷɿ�Ľ����ţ����ڻ�е�ͻ����֪ʶ������������Щ֪ʶ���ڽ����������˺ܴ�����á�
��������о������ǻ�е�֣���һ�����ڹ��������ϵĹ�ҵ�����ˡ���ҵ������ϵͳ������������ϵͳ��ɡ�
�����ǣ���е���֣����в��֣����Ʋ��֡�������ϵͳ�ǣ�����ϵͳ����е�ṹϵͳ������ϵͳ��������—��������ϵͳ���˻�����ϵͳ������ϵ�ȵȡ�
�û�е��Ϊ���������ϻ�е�֣�Ҫ���ܹ������������һ�塣
����˳�ӹ��Ⱥ�--��е�ֱ��½�--��צ��£�н��Ѽӹ��õĹ���--�ֱ�����--�ֱۻ�ת��ж�Ϲ�λ--�ֱ��½�--�������ת����צ�ɿ�����--�ֱ�����--��ת���ӹ���λ--�ֱ��½�--��צ�ɿ�����--�ֱ��������ȴ���λ�Ⱥ�е�ֵĶ���ȫ������Һѹ������PLC���ơ�
PLC���ƿ���ʵ�ֻ�е�ֵ��Զ�����ת���ܹ�������ظ��������ַ���Ĺ���
��е�ֽṹ��ƣ�
��е�ṹ������ץȡ��е�����յ�ִ�л������ǻ���������ʵ�ָ����˶���ʵ�壬��е�ṹ�IJ��֡����͡�������ʽ�Լ�����ϵͳ�����ֱ�ӹ�ϵ�Ż����˵Ĺ������ܡ�
��е�ṹ��������ʽ��Ҫ��ֱ�������͡��������͡�Բ�������͡�SCARA�ͺؽ��͵ȡ�
��е���ܴ����������Σ�ա��ظ����ĵĹ��������������Ͷ�ǿ�ȣ�����Ͷ�����Ч�ʡ���е�ֵõ��˹㷺��Ӧ�ã��ڻ�е��ҵ�����������㲿����װ ���ӹ������İ��ˡ�װж���ر������Զ������ػ�������ϻ�����ʹ�ø��ձ顣Ŀǰ����е���ѷ�չ��Ϊ��������ϵͳFMS���������쵥ԪFMC��һ����Ҫ��ɲ��֡�
��Ը������ϻ�е�֣�Ϊ��ʹ������һ���IJ�������ԺͽϺõ�ʹ�����ܣ��ڽṹ����ϲ���Բ�������͡�����������ϵͳ���Ϊ�ĸ����ɶȡ�
�ֲ��Ľṹ��ƣ�
�ֲ�����������Ӵ��IJ���������������Ӵ�����ʽ��ͬ���ɷ�Ϊ�г�ʽ������ʽ�ֲ���Ϊ��ʹ��е�ֵ�ͨ���Ը�ǿ���ѻ�е�ֵ��ֲ��ṹ��Ƴɿɸ����ṹ�������гֹ�����Բ������ʱ��ʹ�üг�ʽ�ֲ������û�е����������;�����гֹ����ǰ���ʱ����ʹ��������ѹʽ���̡�
������漰���������רҵ֪ʶ���������ܹ�����ѧѧϰ����֪ʶ��ֵ�Ӧ�ã�һЩ���������߲�����֪ʶҲ������Ƶ���������������
��е�ֵ���Ƹ�ϵͳ��˵�����ǻ����˵���ƣ������Dz�����������Ʒ��������ж��ͻ�����һ�㣬������ƵĻ�е��ҲӦ��������Ļ�����֪ʶ��
���ڻ�е�ֵ�����ڹ����������࣬���кܶ�Ĺ���ҲӦ���˴����Ļ�е�����ڹ���������е�ֵĹ�����;���Dz�һ���˴������Ҫ�ǽ���е�ֵĹ��ܸ����۸���ͻ���
�䷢չ������������һ�ǻ����˵����ܻ����ഫ����������������Ƚ��Ŀ����㷨�����ӵĻ������ϵͳ��������������ӹ�����ϵ��������Ծ��������Ĺ�ҵ�����ˣ������㹤��Ҫ��Ļ����ϣ���ϵͳ�ľ��á���ࡢ�ɿ����������ù�ҵ��������ģ�黯�г�����Ԫ����
����һ��ʱ����Ҳ����ܺõ������˴�ѧ�ڼ��רҵ֪ʶ������ѧ���˺ܶ���ѧУѧ�������˼ʴ�����ʽ��������֪ʶ�棬Ҳ�ḻ�����������Ϊ�Ҽ���̤�����춨�����õĻ�����
ʵ���ڼ�Ļ�еά����������ҵĶ��������͵���˼������������Ƶ�ʱ�����ܹ�������������кܶ��������Դ�ڴˡ�
ͨ��ʵ������֪���Լ����кܶ����Ҫ�Ľ����ܶණ����Ҫѧϰ��
Ŀ¼
Ŀ¼ I
�� ҵ �� �� �� �� �� III
��ҵ��Ƶ��б��� IV
ժ Ҫ VI
Abstract VI
��һ�� ���� 1
1.1 ��е����Ƶ�Ŀ�ĺ����� 1
1.2 ��е�ֵĸ��� 1
1.3 ��е�ֵķ�չ����ʷ���� 2
1.4 ������ƾ������� 2
�ڶ��� ��е�ּ�� 4
2.1��е�ֽ��� 4
2.2��е�ֻ�����ʽ 4
������ ������ 6
3.1�������ѡ�� 6
3.2������� 6
3.3�ֱ���� 7
3.4����� 7
3.5��ץִ������� 8
3.6�������� 9
3.7�ֱ۵�ƽ����� 12
������ ���������� 13
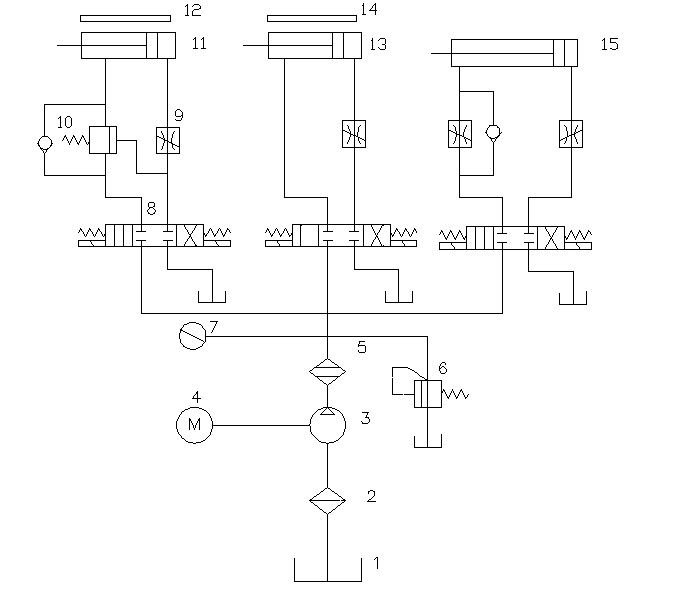
4.1Һѹ����ϵͳ��Ƽ��� 13
4.2ҺѹԪ����ѡ���� 16
4.3 ���ѡ�ͼ��������� 16
������ ����ϵͳ����� 18
5.1����ϵͳӲ����� 18
5.2���������� 18
5.3��������ѡ�� 19
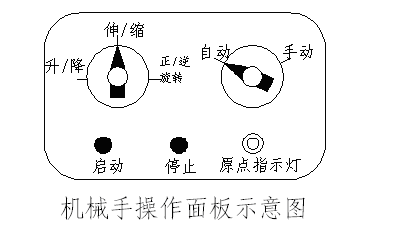
5.4��е��ԭ������ 20
5.5����ϵͳ������� 21
������ ��е����Ʒ��� 28
�� �� 29
�� л 30
����� 31
1 ����������.��е��ƿγ����.2006,���пƼ���ѧ������
2 ������.���紫������.2001�����пƼ���ѧ������
3��һ��ҵ��е����.����ҺѹԪ��������1972
4 ����.Һѹ����ѹ������2006.��е��ҵ������
5������, ����, ���Ҳ�. ����CAN����Һѹ��������˿���ϵͳ�����ʵ��. ������Һѹ. 2003
6 ������, ������. �����Զ������˻�е�ֻ���ϵͳ�о�. ������Һѹ. 2003
��Һѹ. 2003
7 ��ѧ��. �ɱ�̿�����(����ƪ). ����: ���ӹ�ҵ������, 2003.
8 ���, �Ա�, ʩ����. ����PLC�Ļ�е�ֻ����������. Һѹ������. 2005
9���, �Ա�, ʩ����. ���ϰ��˻�е�ֵ�����. ����һ�廯. 2005
10 ���. ����һ�廯����. ����: ��ѧ������, 2004.
11 ������, ����. PLC���������Ƴ�����װװ���е�Ӧ��. Һѹ������. 2005
12����. ���ֿ��Ƽ����������ٴ����ϵͳ�е�Ӧ��. ��������. 2005
13 ���ܾ�, �Դ���. Һѹ����. ������: ���������̴�ѧ������, 2002.
14 ����ƽ. �ִ�Һѹ����Ӧ��220��. ��ѧ��ҵ������, 2004.
15 ���, ������, ����, ������. PLC���Ƶ����������ϻ�е��. Һѹ�������ܷ�, 1999
16 ������, ������, ��ʻ�, ������. ���������ϻ�е�ֵ��о���Ӧ��. ��ѹ��е. 1994
17 ����, ����. װж��е������о�. ��е. 2004
18 ����һ. �λ�Զ��崲��е�ֿ��������. ���ݴ�ѧѧ�����ۺϰ棩. 2000