




苏ICP备112451047180号-6
基于ARDUINO板的智能遥控拖地小车设计
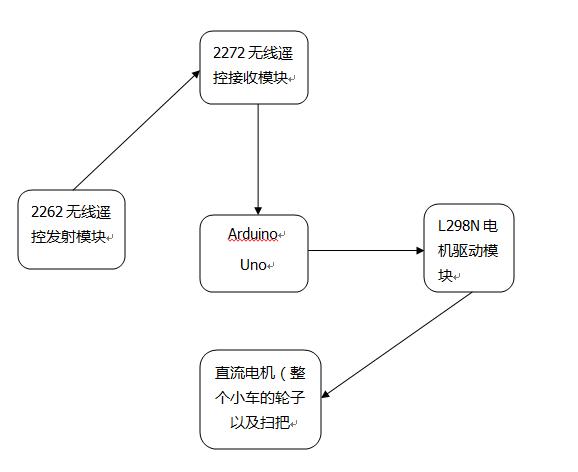
本作品是基于Arduino Uno技术的一款智能遥控拖地小车,是由六个部分组成:PT2262发射模块、PT2272接收模块、Arduino Uno板主控模块、L298N电机驱动模块、直流电机模块、充电电源模块。阳丽涛负责PT2262发射模块与PT2272接收模块组成无线通讯功能,喻容负责L298N电机驱动模块与直流电机模块组成控制小车运作,杨媚负责Arduino Uno板主控模块与充电电源模块组成主控系统以及电源供电系统。
PT2262发射模块共四个按键S1、S2、S3、S4,其中S1控制小车前进,S2控制小车后退,S3控制小车左转,S4控制小车右转,S1和S2控制小车停止;S1和S3控制小车开始拖地,S3和S4控制小车停止拖地。
参考文献
摘 要
家庭主妇因长期拖地扫地而导致引发腰肌的劳损,导致的腰肌劳损,容易得腰椎病、颈椎病、腰间盘突出症、骨质增生等病变。所以此次设计一款能减轻家庭主妇的劳力。从而使主妇们在做家务的方面上,既轻松又方便。这是一款基于ARDUINO板简洁小巧的智能遥控拖地小车,同时它又是一款小型玩具车,在小孩子玩的同时又可以帮忙拖地,进而清除家庭死角。
关键词:智能小车;PT2262/PT2272; L298 N; ARDUINO
目 录
1. 绪论 4
2. 智能遥控拖地小车 4
2.1智能遥控拖地小车的优点 4
2.2智能遥控拖地小车的特点 4
3. 系统概述 4
3.1系统功能描述 4
3.2系统方案设计 5
3.2.1系统设计流程图 5
3.2.2系统设计原理图 5
3.2.3材料清单 6
3.3系统设计思路和步骤 7
3.3.1 系统设计 7
4. 芯片工作原理及其介绍 7
4.1 PT2262-R4/ PT2272-M4的简介 7
5. 智能遥控小车硬件设计 8
5.1 ARDUINO主控模块简介 8
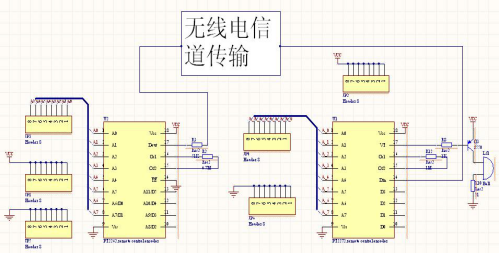
5.2 PT2272-M4与PT2262-R4收发模块简介 9
6. 结 论 9
参考文献 9
致谢 10
附录 调试程序代码 10
本作品是基于Arduino Uno技术的一款智能遥控拖地小车,是由六个部分组成:PT2262发射模块、PT2272接收模块、Arduino Uno板主控模块、L298N电机驱动模块、直流电机模块、充电电源模块。阳丽涛负责PT2262发射模块与PT2272接收模块组成无线通讯功能,喻容负责L298N电机驱动模块与直流电机模块组成控制小车运作,杨媚负责Arduino Uno板主控模块与充电电源模块组成主控系统以及电源供电系统。
PT2262发射模块共四个按键S1、S2、S3、S4,其中S1控制小车前进,S2控制小车后退,S3控制小车左转,S4控制小车右转,S1和S2控制小车停止;S1和S3控制小车开始拖地,S3和S4控制小车停止拖地。
1. 绪论
据调查,无论你认不认可,我们都得承认智能扫地机已经在逐渐普遍开来,而将来的发展会越来越好。从传统的扫帚到吸尘器在到智能化扫地机器,其中最大的改变不就是“智能”这两个字所带来的巨大变化,智能拖扫地在智能化的热潮下为人所知道并了解。跟传统的扫帚与吸尘器相比,智能拖地机只需亲自动手来操作遥控,就能控制小车的智能系统,然后使其能够智能拖扫。遥控控制似乎是一个折中的选择,在某些清扫情况下,遥控控制即比手动来的更轻松,又比智能更高效。同可以利用智能拖地小车清楚家庭死角和道路上清扫。
2.智能遥控拖地小车
2.1智能遥控拖地小车的优点
1)价格低廉,材料容易购买到,适用于很多的家庭、小朋友等。
2)制作简单,采用ARDUINO Uno板,L298N电机驱动,还有PT2262/PT2272芯片控制距离也比较远。
3)环保节约,并且车身可以用家庭里丢弃的东西做,可以废物利用。
4)使用方法简单,并且小孩子玩的同时能清除屋内死角。
2.2智能遥控拖地小车的特点
1)能帮助缓解压力劳力,既能玩又能清除垃圾。
2)电池使用时间长,并且是可充电电池,从而循环利用。
3)使用寿命长。
3.系统概述
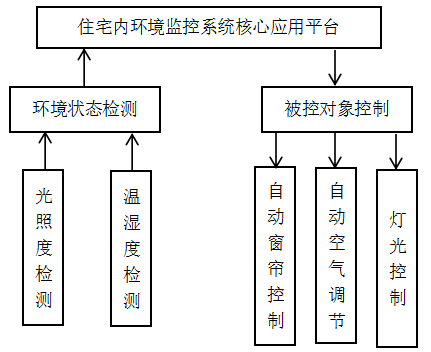
3.1系统功能描述
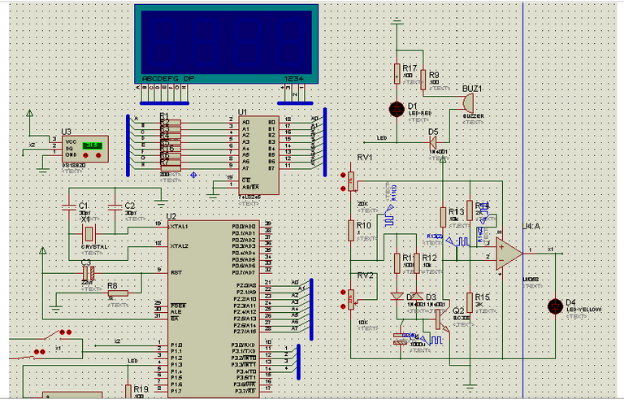
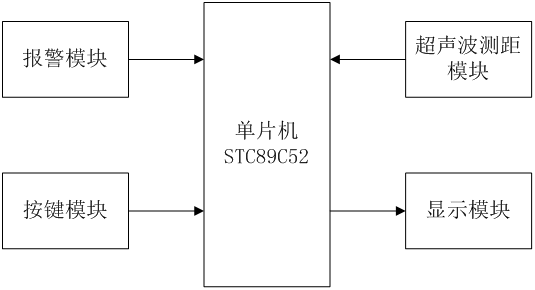
智能遥控小车在打开开关之后,我们按下遥控上面的按键,使得PT2262-R4发射模块读取到按键的变化,与此同时,编码芯片PT2262发出的编码信号由:地址码、数据码、同步码组成一个完整的码字,解码芯片PT2272接收到信号后,其地址码经过两次比较核对后,输出一个信号给ARDUINO Uno板。
而当ARDUINO Uno板接收到2262/2272 四路无线遥控模块的信号时,通过ARDUINO Uno板通过执行程序代码,再做出信息处理以及相应的反应信号,反应信号输出L298N电机驱动模块具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。同时给直流电机相应的电平,最后直流电机再做出前进/后退/左转/右转/拖地等相应动作。
参考文献
[1]冯锡生 朱荣《无线数据通信,中国铁道出版社》1997年12月
[2]李文元:《无线通信技术概论》,国防工业出版社,2006年04月
[3]模拟电子技术基础------清华大学电子学教研组编
[4]张永瑞等编,电子测量技术基础,西安电子科技大学出版社,2004.
[5] 《ARDUINO程序设计基础(第二版)》等