





苏ICP备112451047180号-6
垦区农机作业GPS网络差分系统设计
第一章 前 言
1.1 背景及意义
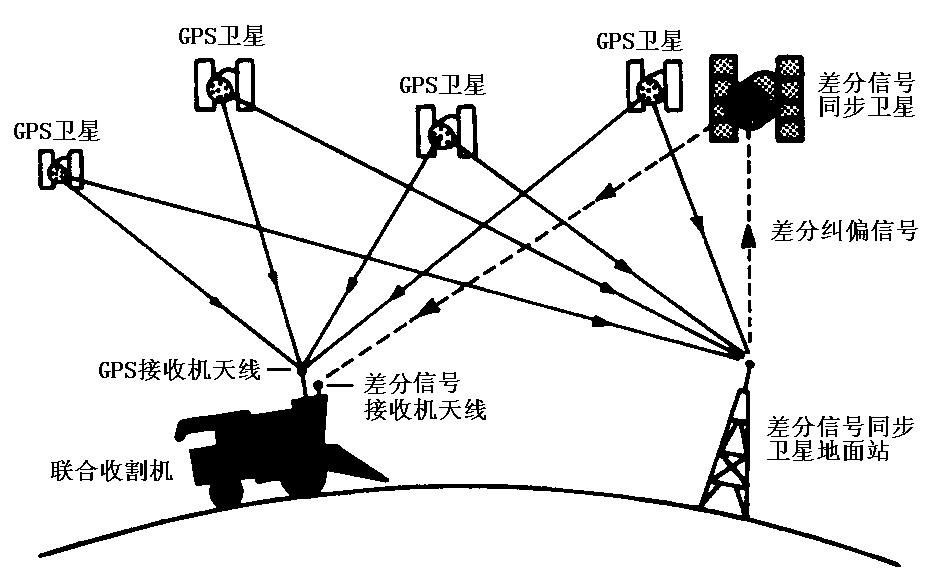
我国是人口大国,也是农业生产大国,我们用不足7%的土地养活了20%以上的人口。中国人民是勤劳的人民,我们曾经靠手工、靠人力、靠畜力完成了一个看似不可能完成的任务。进入21世纪,随着科技的发展,尤其是在通讯领域、GPS(全球卫星定位系统)、农机装备制造领域以及农艺技术的迅猛进步,为实现精准地进行农业生产、农机管理提供了可能。现代农业生产已经向着大农业和机械化道路不断发展。在未来的现代农业生产中,卫星导航自动驾驶技术必将发挥重要作用,特别是在平坦的进行规模化生产的地域。当前农业机械自动驾驶技术在国外,如:美国、欧洲等许多国家已经普遍使用。在我国黑龙江、新疆地区也得到广泛的应用,并且近年来江苏、山东等很多省份也开始了农机自动驾驶技术的应用。新疆地处祖国西部地区,面积广阔,土地的总面积能够达到166 万多平方公里,占中国陆地总面积的1/6,依靠得天独厚的自然环境和发展现代化农业的有利条件,而成为我国一个农业大区,田块地势平坦、田块方正、规划合理,连片规模种植,机械化作业基础好,基本实现全程机械化作业。黑龙江省农垦的土地总面积达到了5.76 万平方千米,土地以林地和耕地为主,其中耕地为206万公顷,林地为87万公顷,草原为36.6万公顷 ,水面为27.4 万公顷。黑龙江省垦区有广袤的黑土地,土壤肥沃,人均拥有的土地要远远高于国内的其他地区,土地连片,适合机械化作业。但人和土地的矛盾日渐激烈,增加土地的单位产出和提高农业经济效益是当前垦区农业生产的重要目标,因此现代农业生产走向大农业、大农机、智能化就显得非常关键。随着我国政府不断地出台政策,推进我国城镇化进程,以及鼓励土地流转,支持农业合作社、家庭农场的发展,不断加大对农机补贴的力度。我国的农业生产由原来依靠小马力拖拉机变成使用生产效率更高,作业质量更好的120马力以上大型拖拉机。特别是在新疆和东北地区,近年来农业机械发展势头日益旺盛,愈来愈多的农户在农业生产过程中只依赖于少数几台大功率的拖拉机,所以农民迫切地要求希望能够最大限度地提高这些大马力拖拉机的工作效率。使用农机GPS导航自动驾驶技术可以保证一致的行距、精确的作业路线,省去了划印器等农机部件,可以进行夜间作业,效率高,精度好,便于抢农时。农业机械GPS导航自动驾驶技术的关键在于GPS差分技术,因为,平常我们使用的GPS定位服务的定位精度在15米,甚至15米以上,不能够满足我们在田间作业过程中的定位精度要求,所以,我们要对其观测数据进行修正,使其精度达到我们的要求,此时就需要GPS差分技术。目前垦区已经在使用三种不同的GPS差分方法,无论是卫星差分,还是地面自主型差分覆盖的服务区域都不大,在30公里左右,无法进行跨区作业,在一些地形复杂的区域,信号较弱,易受干扰。而GPS网络差分系统后期使用成本低,服务区域广,入网便捷可实现跨区作业。这一系统的建立必将使得农业生产的各项管理工作进入到了信息化、数字化时代,既能够提升作业效率,又可以提高作业质量,将大大的推进农业技术的发展和社会的进步。
1.4 研究内容
网络差分系统能够提供高精度的差分定位服务,具有更大的覆盖面积。可以实现地区GPS的规模化的应用,可以使整个黑龙江垦区,甚至整个黑龙江省及周边地区都可以覆盖,满足农机用户对精准的导航定位服务要求的同时,可实现跨区作业。多参考站GPS网络差分系统包括参考站、数据控制与处理中心以及移动站三个部分,其中数据控制与处理中心是整个网络差分系统的首脑、神经中枢,既有通信控制的功能,也有数据处理的功能.多参考站GPS网络差分信息服务系统是网络差分系统数据控制与处理中心,中心能接收到各个参考站的实时观测得到的信息数据,并将这些数据进行解算,再结合移动站用户的实际观测到的信息数据,求解出移动站用户的改正信息数据,最终求解得到移动站用户的精确的位置坐标,并将此信息传送给移动站用户,进而实现农业机械的精准定位。在多参考站GPS网络差分信息服务系统中,主要重要的任务就是网络差分改正信息数据的生成。垦区农机GPS网络差分系统采用VRS网络差分技术,系统服务器收到移动站用户发送的位置数据后,会选择三个参考站作为基准,虚拟出一个参考站,虚拟参考站与移动站用户之间的基线很短,从而达到了提高定位精度的目的。本文详细介绍了虚拟参考站GPS伪距观测值、载波相位观测值的计算方法,依据自己本身坐标产生虚拟参考站RTK差分改正信息,实时通过GPRS网络实时发送给入网移动站用户,进而实现高精度网络差分。
目录
第一章 前 言 1
1.1 背景及意义 1
1.2 黑龙江省垦区农机作业GPS差分技术应用现状 2
1.3 GPS差分协议 4
1.3.1 位置差分 4
1.3.2 伪距差分 4
1.3.3 相位平滑伪距差分 6
1.3.4 载波相位差分 7
1.4 研究内容 8
第二章 多参考站GPS网络差分系统结构 10
2.1 网络差分技术原理 10
2.1.1 VRS网络差分技术 10
2.1.2 虚拟伪距观测值计算 11
2.2 网络差分系统结构 12
2.2.1 参考站 13
2.2.2 移动站 14
2.2.3 数据控制与处理中心 15
第三章 多参考站GPS网络差分信息服务系统设计 16
3.1 系统结构设计 16
3.1.1 总体设计 16
3.1.2 数据传输链路设计 18
3.2 基于Ntrip协议的网络应用 20
3.2.1 Ntrip协议分析 20
3.2.2 Ntrip协议在系统中的应用 21
5.1 结论 24
5.2 展望 24
参考文献 25
致 谢 27
参考文献
[1] 陈俊勇,党亚民.全球导航卫星系统的进展及建设CORS 的思考[M].地球空间信息,2009,7(3):1-4
[2] 潘一平,吴宇翔,王鸣霄,钟金宁.建立CORS连续运行基准站的探讨[M].现代测绘,2010,33(4):8-10
[3] 钟定福.浅谈连续运行GPS参考站网系统的建立[M].江西测绘,2008,75(4):31-32
[4] 中华人民共和国国家标准.GB/T 18314-2005, 全球导航卫星系统连续运行参考站网建设规范[S].北京: 中国标准出版社,2005.
[5] 李华,陈勇,张振宇.CORS的发展状况和建立CORS的必要性[M].信息技术,2009,5:121-123,125
[6] 王熙,王新忠,庄卫东.DGPS在友谊农场土壤取样中的应用[J].黑龙江八一农垦大学学报,2003(01):1-3
[7] 陈德恩,杨富江. 精准农业技术在八五二农场的示范应用[J].现代化农业,2008(4):12-15
[8] 王新忠,王熙,王智敏,庄卫东,汪春. 黑龙江垦区精准农业三种GPS差分方式比较研究[J].黑龙江八一农垦大学学报,2006(1):15-19
[9] 王新忠,王熙,王智敏,庄卫东,汪春.黑龙江垦区精准农业两种GPS差分方式比较研究[J].黑龙江八一农垦大学学报,2004,(6):22-25
[10] 王新忠,王熙,王智敏.差分GPS定位系统在友谊农场精准农业中的应用[J].现代化农业,2003(09):55-59
[11] 张多利,董德军,赵荔娜.精准农业与现代农业装备.农村牧区机械化[J].2011年.第1期.28-29.
[22] 王世明,吴爱平.精准农业装备新技术及其应用.2010国际农业工程大会论文集.2010年.第11卷.486-491.
[29] 程德明.农机作业卫星导航自动驾驶技术的应用.福建农技推广[J].2013年.第3期.13-15.
[30] 宋金虎.全球导航卫星系统连续运行参考站网(CORS)在农村集体土地确权中的应用研究.科技创新与应用[J].2014年.第8期.16-17.
[28] Xiang lin Liu,Christian Tiberius.Kees de Jong Modelling of differential single difference receiver clock bias for precise positioning[J].2004(07):14-22
[29] G Fotopoulos,M E Cannon.A Bogle Assessment of the LandStar Real-Time DGPS Service under Several Operational Conditions[J].1999(02):34-35
[30] Hisakazu Hada,Hideki Sunahara.Keisuke Uehara DGPS and RTK Positioning Using the Internet processingstrategy[J].2005(9):2-5