



苏ICP备112451047180号-6
基于PID的乒乓球吹浮位置控制实训装置的设计
一、选题简介、意义
毕业设计是电气自动化专业学生完成专业教学计划的最后一个极为重要的实践性教学环节,是综合运用所学过的基本课程、基本知识与基本技能去解决专业范围内的工程技术问题而进行的一次较为系统的综合训练。通过毕业设计,能够培养创新精神和实践能力,提高学生分析与解决实际问题的能力,使学生获得从事专业工作所必需的基本训练和科学研究工作的初步能力。
基于PID的位置控制实训装置设计与实现课题来自企业,是我校对企业开展的技术服务。基于PID的位置控制实训装置以PLC为控制器,采用玻筒内吹浮乒乓球做PID控制载体,利用HMI设备显示乒乓球位置变化暂态过程。与基于PID的温度、液位调节控制实训装置相比,基于PID的位置控制实训装置 —玻筒吹浮乒乓球位置控制实训装置系统的惯性环节较小,参数易于调节,调节周期较短,响应速度灵敏。实训装置制作成本较低,实训准备耗时较短,故障率较低,易于维修。基于PID的位置控制系统将自动化控制技术、信息化软件技术与集成技术有机的结合在一起,是“信息化”与“自动化”的深度融合。
基于PID的位置控制系统涵盖了软件技术、电气控制技术、通信技术、传感器检测技术等智能工业领域的主流技术。该课题是电气自动化专业的典型实践工程应用案例,课题设计与实现具有重要意义。
二、课题综述(课题研究,主要研究的内容,要解决的问题,预期目标,研究步骤、方法及措施等)
该毕业设计课题是结合学校与企业技术服务项目中的一部分,主要解决乒乓球位置的可调性与悬浮的稳定性和精确性。
首先熟悉毕业设计任务书的内容和要求,接着根据设计要求,查阅相关的文献、资料,完成实训平台的总体规划与方案设计,然后完成电气自动化控制系统原理设计、硬件接线设计、自动化控制系统接线安装、系统软件程序设计及HMI画面设计,最后进行系统联调。
该系统课题主要涉及到激光测距仪的研究与使用、乒乓球运动闭环控制系统的设计、PLC程序的编写、PID参数的设置和HMI画面制作以及系统联调。
本次毕业设计主要研究的内容:
1.激光测距仪的研究与使用;
2.工业以太网通信网络的组建;
3. 玻筒内吹浮乒乓球闭环控制系统的设计;
4. PLC程序的编写;
5. HMI画面制作与变量连接;
6. PID参数设置与调试;
7. 系统联调。
三、设计(论文)体系、结构(大纲)
第一章 绪论
1.1课题的背景及意义
1.2国内外研究现状
1.3 PID 控制技术特点
1.4课题研究的内容
第二章 系统总体方案设计
2.1控制方案设计
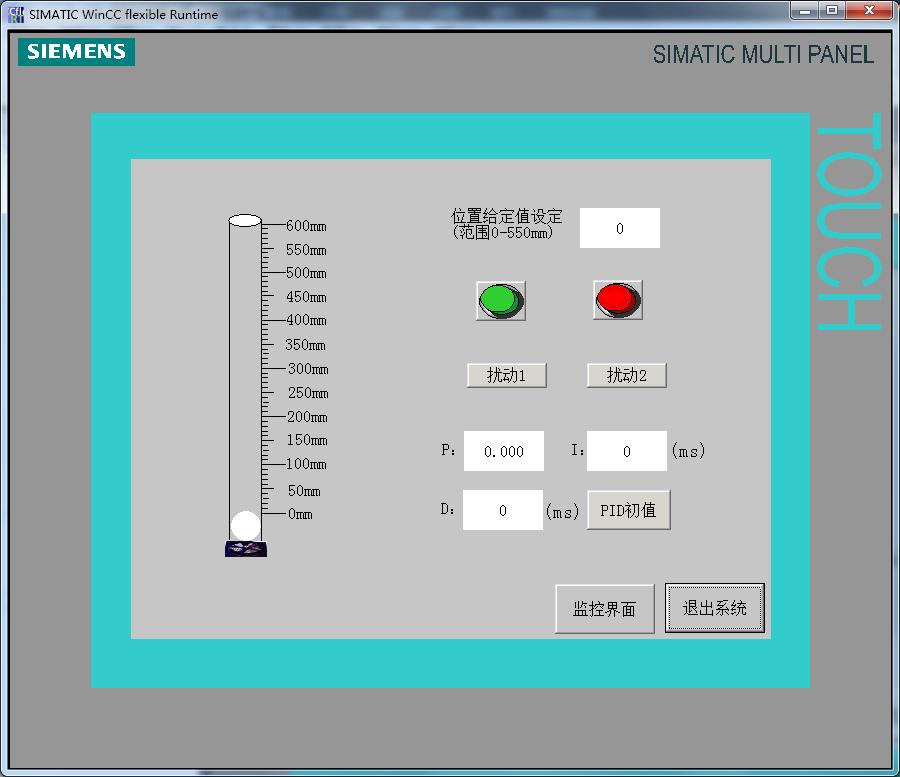
2.2 HMI界面设计
第三章 系统硬件设计
3.1控制器选择
3.2 HMI选型
3.3激光测距仪选型及参数设置
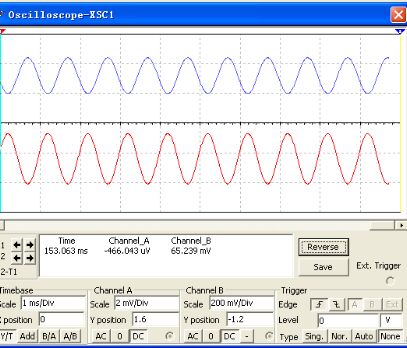
3.4 PWM脉宽调制
第四章 软件设计
4.1 项目硬件组态
4.2主程序设计
4.3 HMI程序设计
第五章 系统调试
5.1实验平台搭建
5.2 开环控制系统调试
5.3 闭环控制系统调试
5.4系统测试结果
第六章 总结与展望
小结
参 考 文 献
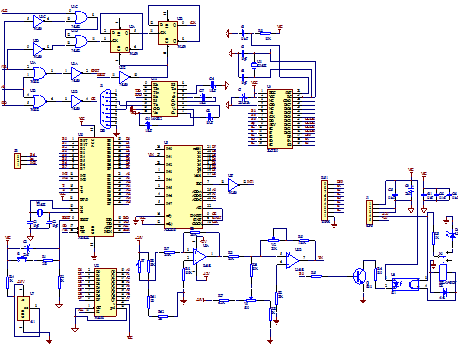
附录一 系统电路原理图
附录二 FB41功能块参数
附录三 系统程序
附录四 P整定曲线变化趋势图
附录五 实物图
总结与展望
为了让学生了解自动控制系统及PID控制核心思想,设计了一种基于PID的位置控制系统,实现了乒乓球位置的可调并且能够稳定停留在设定值处。
在研究中所搭建的实验系统可用于自动控制理论课程中的开环控制实验、闭环控制实验、传感器课程实验、PLC课程实验及触摸屏与组态技术课程实验,也可以根据PLC、HMI、PWM板的组合完成控制类的综合实训项目。完成的工作及优势表现在以下方面:
1.工业以太网通信网络的组建。整个位置控制系统采用工业以太网通信,工业以太网具有数据传输速率高、允许使用不同的物理介质和构成不同的拓扑结构、能在同一总线上运行不同的传输协议,从而可以建立企业的公共网络平台或基础架构等特点。
2.完成位置控制的硬件设计。使用激光测距仪测量乒乓球位置变化的实时数据、采用PWM板控制轴流风机的风速、使用HMI可视化界面显示乒乓球位置的暂态过程、采用西门子S7-300 PLC实现PID控制与管理。
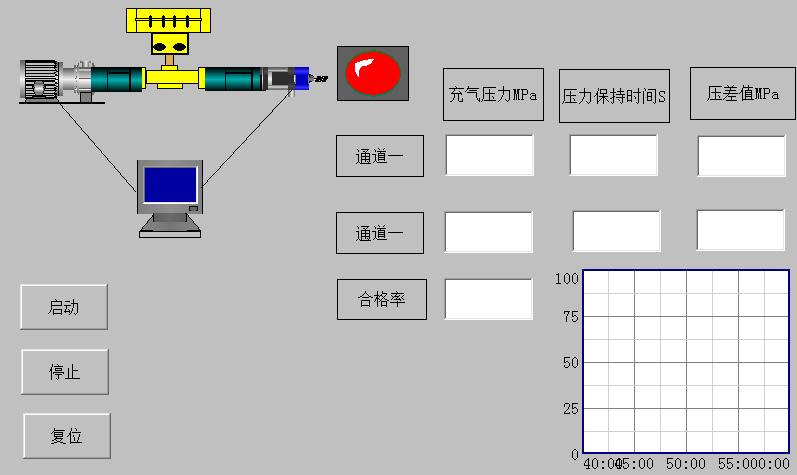
3.构建HMI可视化位置暂态过程监控系统。在HMI上设计了操作界面,使得PID参数可调并且增加了系统扰动,为了进一步方便学习者直观的了解各种参数变化及外部扰动对小球平衡位置的影响,还设计了监控界面,可以动态观察曲线实时变化情况,该曲线可以放大、暂停、查看历史数据,方便学习者研究和讨论。
由于时间有限以及水平有限,目前研制的基于PID的位置控制系统还存在许多不完善或有待改进的地方,需要进一步开发与完善的主要工作包括:
1. HMI监控中心的智能控制软件的功能还需进一步的开发。延长历史曲线查看的时间,有利于数据对比使得系统更加合理化。
2. 提高轴流风机与玻筒之间的装配效果,使得轴流风机提供的风量全部在玻筒内,没能有泄漏。
3.没有考虑整个系统的信息安全问题。
参 考 文 献
[1]PID控制_百度百科.
DZJhTBVKt5AXcgV2nAqQt1_JSvg6BPnMmr-7jH2VH
[2]SIMATIC Manager手册,西门子有限公司.
[3] 向晓汉.S7-300/400 PLC基础与案例精选[M].北京:机械工业出版社,2011.1
[4] 石学勇.S7-300 PLC控制系统的构成与调试[M].北京:化学工业出版社,2012.8
[5] 朱文杰.S7-300/400 PLC编程设计与案例分析[M].北京:机械工业出版社,2010.1
[6] 刘建昌.S7-300/400 PLC工业网络通信技术指南[M].北京:机械工业出版社,2009.5
[7] 周志敏,纪爱华.西门子PLC通信网络解决方案及工程应用实例[M].北京:机械工业出版社,2014.5
[8] 阳胜峰,吴志敏.西门子PLC与变频器触摸屏综合应用教程[M].北京:中国电力出版社,2013.5
[9]沈明新.西门子工业控制设备工程应用技能实训教程[M].沈阳:东北大学出版社,2012.5
[10]席巍.人机界面组态与应用技术[M].北京:机械工业出版社,2010.4
[11]廖常初.西门子工业通信网络组态编程与故障诊断[M].北京:机械工业出版社,2009.10
[12]孙立志.PWM与数字化电动机控制技术应用[M].北京:中国电力出版社,2008.1