



苏ICP备112451047180号-6
立体仓库智能穿梭车PLC控制系统及S型速度曲线Matlab仿真
与本课题有关的国内外研究情况:
自动化立体仓库/冷库也称为高架库或高架仓库,一般是指采用几层、十几层乃至几十层高的货架储存单元货物,用相应的物料搬运设备进行货物入库和出库作业的仓库。
自动化立体仓库(AS/RS)是物流技术的革命性成果,它一般由高层货架、巷道堆垛机、输送机、控制系统和计算机管理系统(WMS)等构成,可以在计算机系统控制下完成单元货物的自动存取作业。
自动化立体仓库应用最早的国家是美国(1953年),而日本是应用最广的国家。
我国于1973年开始研制第一座由计算机控制的自动化立体仓库(高15米,机械部起重所负责),该系统1980年投入运行。据粗略统计,到2010年底,我国自动化立体仓库数量已超过1000座。
我国自动化立体仓库库应用范围很广,几乎遍布所有行业。目前已经取得应用的行业主要有机械、冶金、化工、航空 航天、电子、医药、图书、食品加工、烟草、印刷、配送中心、机场、港口等。
目前我国的自动化立体仓库技术已经基本成熟,并进入大量应用阶段。其技术水平与先进国家的差异主要在于高速性能、工艺、可靠性等方面。
自动输送系统:
自动输送机主要分为托盘式和箱式两大类。各自均有很多的种类。托盘式输送机包括链条式、辊筒式输送机,穿梭车,AGV,提升机等,一般与立体仓库配套使用。箱式输送机则包括皮带式、辊子式输送机,提升机等多种形式,在配送中心广泛应用。此外,机场行李系统采用的输送机是比较特殊的一类。我国自动输送系统的发展,要早于自动化立体仓库。其主要原因是生产线发展和邮政业务发展的需要,这在1980年代已经开始走向成熟。但作为重要的物流装备,尤其是随着大型配送中心的发展。
我国对穿梭车及智能仓储系统的相关研究起步较晚,目前主要是依托工业自动化 4.0 走自主研发的道路,其中形成的主要成果及较为成功的案例如下:
占少民对自动穿梭板的行走部分进行了结构设计,并对行进位置和速度的控制进行了研究;张恩贺对自动穿梭板的顶升系统进行了结构设计并完成了控制系统设计;张国轩进行了自动引导车的结构设计与分析;王荣本等设计的 JLUIV 型 AGV 将小车以模块化思想进行分别设计,其中的设计理念对于自动引导车及其控制系统有较高参考价值。
2001 年,昆明船舶公司研发设计了一种双轨直线型穿梭车,就往复穿梭车在立体仓库中的实际运用进行了阐述,同时提出了往复式穿梭车输送能力的设计计算方法。2002 年国内自主设计的单轨环行穿梭车,其改进方案通过采用单工位单轨环形的铝合金轨道,使得穿梭车的工作效率在一定程度上得到了提高。2003 年国内优化设计的直线型双工位穿梭车,其最大的改进特性是由两个工位同时完成货物的装卸,对穿梭车的输送效率提升很大。
2004 年,太原一家公司研发设计了一款多功能穿梭车,其特点是:在一般直线型穿梭车的基础上,添加了可对货物和托盘进行外形检测的装置,并且新增了拆盘功能 。这款穿梭车有效解决了一般直线双轨穿梭车控制复杂、效率低下、易故障报错等弊端。
2010 年,天津万事达公司研发设计了改进的往复式顶升穿梭车。通过将顶升轴与行走轴之间调整为滑动副的关系,使得顶升运动和行走运动相互独立,这种方式下穿梭车的顶升效率较高,顶升轴只需旋转半圈即可实现顶推功能,不足在于顶升轴是空心的,因此受力性能不好,一般适用于载荷较轻的应用场合。
2017 年 11 月,唯品会正式对外曝光了其最新上线的自动化仓储系统蜂巢式电商 4.0 系统。该仓储系统位于唯品会在广东肇庆的华南物流中心 13号仓库,设备占地面积 2500 平方米,仓库设备和系统提供方为兰剑物流科技股份有限公司。唯品会未来将把这套仓储系统更多地开放给平台商家,提高订单处理效率。除了唯品会,兰剑物流已经与著名零食品牌商三只松鼠达成合作,其位于安徽芜湖的自动化仓储系统已处于试运行阶段。
本课题研究的主要内容及方法:
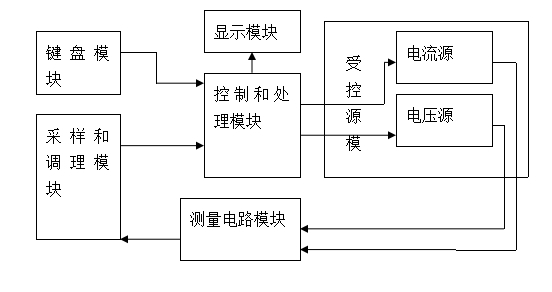
本文所研究的智能穿梭车结构及其控制系统主要针对电商用智能物流仓储系统应用方向进行设计,属于巷道式自存取穿梭车,其主要研究内容是进行穿梭车的结构及伺服控制系统的设计。工业自动化领域中,常规 PID 控制系统由被控对象及 PID 控制器共同组成。PID 控制器是一种线性控制器,通过给定值 r(t)减去实际输入值(即反馈值)y(t)所得到的偏差值,再将偏差值按比例、积分和微分通过线性组合得到控制量,最终实现对被控对象的控制。
本课题所需要解决的问题:
1、 穿梭车的机械结构的设计:
智能穿梭车是自动化立体仓库的核心,其自动化程度决定了立体仓库的效率,因此穿梭车的机械结构设计是穿梭车系统设计的基础和重点。
2、 穿梭车的控制系统的设计:
将智能穿梭车应用于仓储物流可以提高存储空间的利用率以及降低物流运输的成本,作为核心载体的巷道式穿梭车,必须设计成以可编程的逻辑控制器为主体,以可接收控制信号并完成相应动作的机械结构或模块为执行机构,具有灵活、安全、稳定性高等特性的运载工具。穿梭车设计的合理性决定了仓储物流的使用效率,在优化的机械结构设计的基础上,需要配套有相应的控制系统才能发挥穿梭车作为核心载体的智能仓储物流的优点。因此智能穿梭车的控制系统是整个仓储物流体系的核心关键。
预期结果及其意义:
通过PID控制技术实现对穿梭车的控制,解决了自动化立体仓储现阶段自动化程度不足、效率低下等问题,使得穿梭车在运输、搬运环节完全取代人力,提升穿梭车应用带来的便捷性,也提高了市场对于穿梭车应用的热情 。
通过对穿梭车关键部位机械结构的改进设计,可以实现穿梭车车体在结构层面的自动化基础;除了基本的运输功能外,与自动化立体仓库及巷道式存储结构相匹配的自动装卸机构也应实现完全的自动化,这一机构需要针对穿梭车实际工作环境和需求来设计。而在控制部分,巷道式穿梭车由于其轨道运输特性,需要较高的行走定位精度以保证运输货物相对于货架位置的精确性,在以托盘码或光电门作为辅助定位设备的同时,穿梭车自身在高速运行下的运动定位精度也显得尤为重要,因此基于穿梭车运动电机的精确位置定位控制研究具有重要意义。
目录
第1章 绪论 1
1.1 课题研究背景和意义 1
1.2 国内外研究概况 2
1.2.1 自动化立体仓库研究现状 2
1.2.2穿梭车研究现状 4
1.3 论文主要研究内容 8
第2章 穿梭车机械结构设计 9
2.1 穿梭车需求分析 9
2.2 穿梭车的基本结构 10
2.2.1 电动机模块选型分析 10
2.2.2 常见电动机类型 10
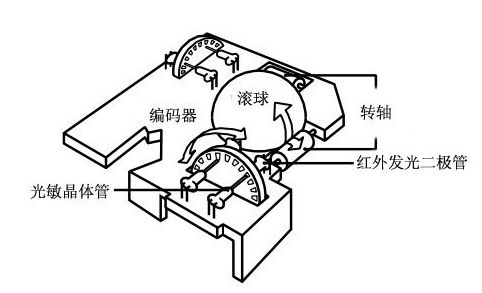
2.2.3行走模块选型分析 11
2.2.4 伸叉模块选型分析 13
2.2.5机械传动方案分析与选择 13
2.3 本章小结 16
第3章 穿梭车控制程序设计 17
3.1手动控制程序 17
3.2自动控制程序 18
3.2.1自动放货程序 18
3.2.2自动取货程序 19
3.3加减速控制程序 20
3.4 本章小结 21
第4章 智能穿梭车控制系统速度控制优化设计 22
4.1 现有S型速度曲线加减速算法 22
4.2优化S速度曲线加减速算法 24
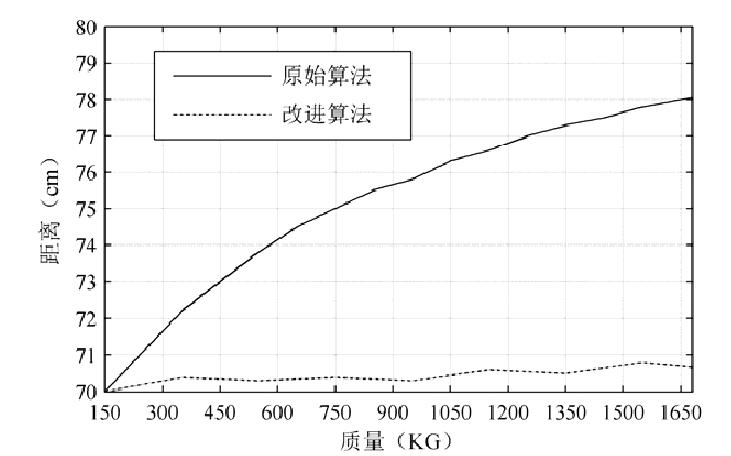
4.3 MATLAB 仿真及结果分析 25
4.4 本章小结 26
结论 27
致谢 28
参考文献 29
参考文献
[]瞿清萍. 某自动仓储系统控制系统软件设计[D]. 南京:南京理工大学, 2008:2-3.
[] De Donno D, Catarinucci L, Tarricone L. A Battery-Assisted Sensor-Enhanced RFID TagEnabling Heterogeneous Wireless Sensor Networks [J]. IEEE Sensors Journal, 2014,14(4):1048-1055.
[] 廖理. 仓储机电设备运行状态监测系统的设计与实现[D]. 兰州交通大学.2015.
[] Marculescu D, Marculescu R, Park S, et. Ready to Ware [J]. IEEE Spectrum, 2003,40.
[] 杨映. 基于分类随机策略的自动化立体库存取优化研究[D]. 天津科技大学.2015.
[]中国自动化立体仓库行业现状调查分析及市场前景预测报告(2017 年版).
[]陈旭.浅析堆垛机货叉机构设计[J].科技创新与应用,2016(16):106.
[] Archetti,F. , Schionmachen,A , Gaivoronski,A.Optimal control policies for automatedstorage/retrieval system using PN models and stochastic optimization[C]. FourthInternational Workshop on Petri Nets and Performance Models,1991,Melbourne, Vic.,Australia,258-267.
[] Kyung Joon Sohn,Hyun Yong Lee,Joonyeob Song.Development of Operating Software forAS/RS including Communication Protocol.IE Interfaces,1995,Vol.8,No.1,pp.45-52.
[] 董皓. 基于排队论理论的自动化立体仓库系统的规划设计及仿真研究[D]. 兰州交通大学.2010
[] Philipp.J. Hortig. Steven M. DeMan. Shuttle for Automated Warehouse[P]. US PATENT: 13/246, 160.
[]胡金昌.多层穿梭车分拣系统的订单分配优化[D].山东大学,2016.
[]王均馗,张韵曾. 现代机械设计理论及其方法研究[J]. 机械与工艺,2016,23;279.
[] 汪朝波. 火电厂中直流电动机的使用、维护和检修[J]. 张家口发电厂.2017.
[]李杲.有轨巷道式堆垛机动力学仿真分析[J].洛阳理工学院学报(自然科学版),2016(26):48-51.
[] 李仕龙 王志坤 汪振毅 姚辉帅 尤兴举. 冲床机械抖料机的设计[J]. 德州学院机电工程学院.2018.
[] 赵洪河. 基于水泥构件的3D打印控制系统的分析与设计[D]. 齐鲁工业大学.2018.