


苏ICP备112451047180号-6
基于自动循迹的智能公交车系统
一、研究背景
当今世界,传感器技术和自动控制技术正在飞速发展,机械、电气和电子信息已经不再明显分家,自动控制在工业领域中的地位已经越来越重要,“智能”这个词也已经成为了热门词汇。现在国外的自动控制和传感器技术已经达到了很高的水平,特别是日本,比如日本本田制作的机器人,其仿人双足行走已经做得十分逼真,而且具有一定的学习能力,还据说其智商已达到6岁儿童的水平。
二、国内外现状
无容置疑,机电一体化人才的培养不论是在国外还是国内,都开始重视起来,主要表现在大学生的各种大型的创新比赛,比如:亚洲广播电视联盟亚太地区机器人大赛(ABU ROBCON)、全国大学生“飞思卡尔”杯智能汽车竞赛等众多重要竞赛都能很好的培养大学生对于机电一体化的兴趣与强化机电一体化的相关知识。但很现实的状况是,国内不论是在机械还是电气领域,与国外的差距还是很明显的,所以作为机电一体化学生,必须加倍努力,为逐步赶上国外先进水平并超过之而努力。
为了适应机电一体化的发展在汽车智能化方向的发展要求,提出简易智能小车的构想,目的在于:通过独立设计并制作一辆具有简单智能化的简易小车,获得项目整体设计的能力,并掌握多通道多样化传感器综合控制的方法。所以立“基于自动循迹的智能公交车系统”一题作为尝试。
三、研究方案
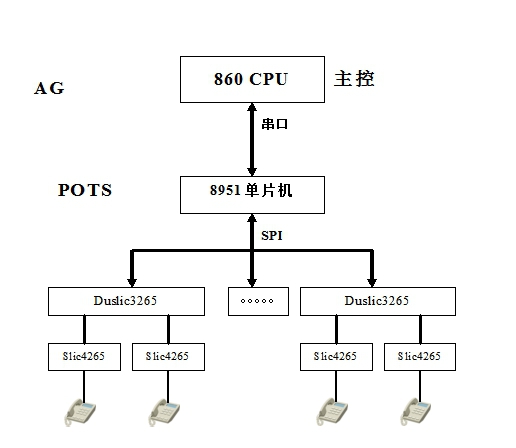
此项设计是在以胡老师提供的小车为基础上,采用凌阳16位单片机和STC89C52作为控制核心,逐步实现循迹行走、无线收发、语音报站、测距、液晶显示等功能。
本次设计主要解决利用凌阳单片机强大的语音功能实现语音报站,NRF2401模块实现无线收发,红外发射和接收管实现自动循迹和测距,1602液晶显示。最后完成硬件实物制作与组装,并编制相关程序,使其实现功能的融合,做出具有预先要求功能的实物。
目录
第 1 章 绪论 1
1.1 课题研究的目的意义 1
1.2 国内外研究现状 1
1.3 研究内容 2
第 2 章 方案选择 3
2.1 控制核心的选择及其简介 3
2.1.1 SPCE061A,STC89C52RC单片机选择和简介 3
2.1.1.1 SPCE061A单片机简介 4
2.1.1.2 STC89C52RC单片机简介 4
2.1.2 61板简介. 4
2.1.2.1 61板结构. 4
2.1.2.2 SPCE061A单片机功能区块作用 5
2.1.3 集成开发环境IDE和KEIL简介 7
2.1.3.1 集成开发环境IDE简介. 7
2.1.3.2 集成开发环境KEIL简介 8
2.2 小车驱动方式选择 8
2.3 光电检测模块 8
2.4 测距模块 9
2.5 无线收发模块 9
2.6 液晶显示模块 9
2.7 语音报站模块. 10
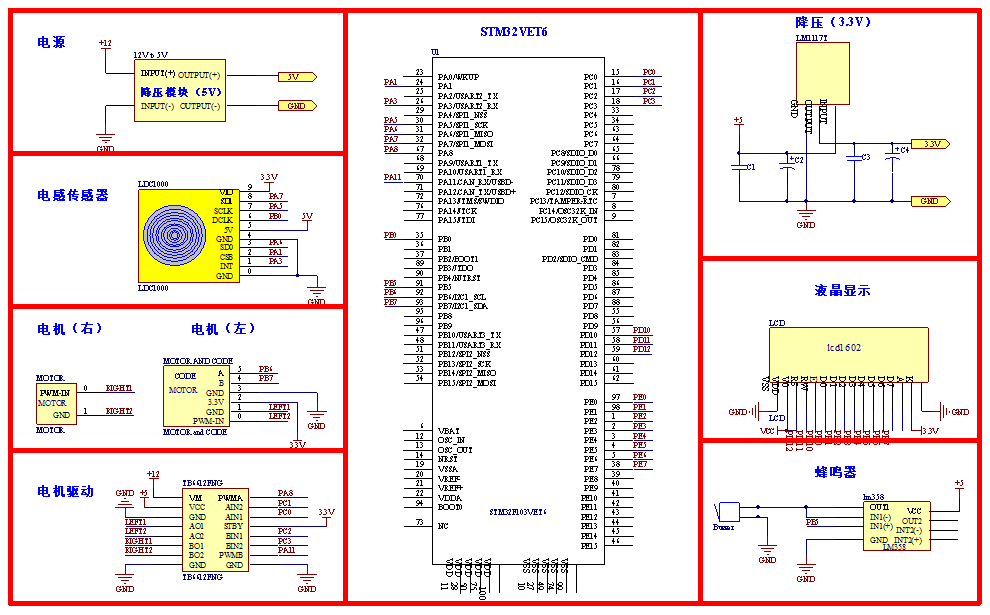
第 3 章 系统硬件设计. 11
3.1 车体结构及其驱动电路. 11
3.2 循线模块. 13
3.2.1 循线硬件电路的设计. 13
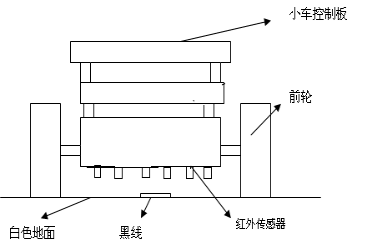
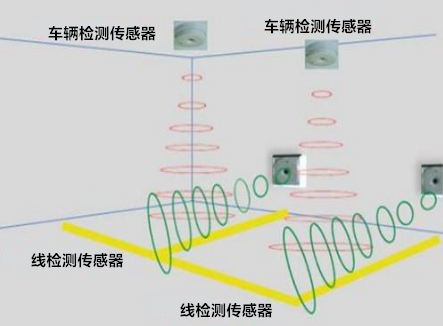
3.2.2 循线传感器的安装. 14
3.3 测距模块. 15
3.3.1 测距硬件电路的设计.15
3.3.2 测距传感器的安装.16
3.4 无线收发模块. 17
3.4.1 无线收发模组NRF2401详细说明.17
3.5 语音报站模块. 21
3.5.1 语音报站模块说明. 21
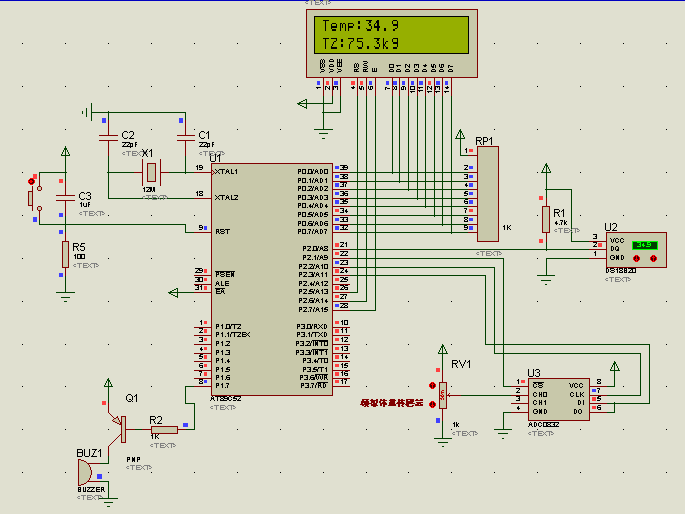
3.6 液晶显示模块. 22
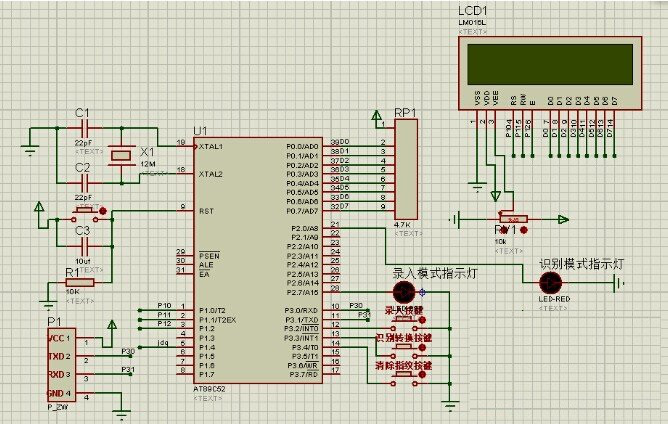
3.6.1 晶模块的电路设计. 22
第 4 章 实验调试. 24
第 5 章 结论与展望. 26
5.1 结论. 26
5.2 展望. 27
参考文献 28
致谢 29
附录A 30
附录B 42
参考文献
[1] 罗亚非.凌阳16位单片机应用基础[M].北京:北京航空航天大学出版社,2003.
[2] 侯媛彬.凌阳单片机原理及其毕业设计精选[M].北京:科学出版社,2005.
[3] 卢胜利.基于凌阳SPCE061A设计实验平台的专业综合设计教程[M].北京:机械工业出版社,2007
[4] 吴建平.红外反射式传感器在自主式寻迹小车导航中的应用[M].北京:机械工业出版社,2005
[5] 吴斌华.基于路径识别的智能车系统设计[M].北京:电子工业出版社,2007.
[6] 杨素行.微型计算机系统原理及应用[M].北京:清华大学出版社,2004.
[7] 李正军.计算机控制系统[M].机械工业出版社,2005.
[8] 实验仪使用说明书[J].凌阳科技网站:http://www.unsp.com/,2007.
[9] 毕业设计指导书V2.0[J].凌阳科技网站:http://www.unsp.com/,2007.
[10] 陈言俊.大学生创新竞赛实战-凌阳16位单片机应用[M].北京:北京航空航天大学出版社,2010.
[11] SPCE061A 16bit sound contorller with 32K*16 FLASH MEMORY.SUNPLYS[J]. 凌阳科技网站:http://www.unsp.com/,2006.