














苏ICP备112451047180号-6
智能循迹小车设计
一、选题简介、意义
随着物联网的发展,智能化、自动化已成为电子产品发展的必然趋势。此课题(智能循迹小车)便是设计一款自动运行的小车,通过传感器采集轨迹信息,由单片机处理信息并控制小车自动运行,无需人为干预;而在这样一个信息化、自动化、智能化的时代,单片机以较强的信息处理和较高的性价比收到人们的关注,熟练掌握和运用单片机已经是电子信息专业学生的一项重要技能。此系统可用于停车场的自动停车、餐饮行业的智能服务员、以及危险区域和不利于人员工作的环境中进行作业,为生产生活提供便利。
二、课题综述(课题研究,主要研究的内容,要解决的问题,预期目标,研究步骤、方法及措施等)
智能循迹小车是一个基于单片机控制集传感器、通信和自动控制于一体的智能电子产品,主要有硬件电路设计和系统软件设计两大块。硬件电路方面主要有主控芯片(单片机)的选用、电源模块、电机及驱动模块、传感器模块、显示模块和其它人机接口电路;系统软件设计主要有系统相关参数设计、传感器信息采集控制、电机控制、通信及其它系统控制和信息处理。智能循迹小车设计需综合运用硬件电路基础知识和单片机软件设计知识,需将软硬件知识结合运用,小车的制作还需有较强的动手能力,在整个设计过程中还要查阅有关资料以及不断的调试修改。
整个系统的预期功能是:小车在无人为干预的情况下能按设计好的路线自动前进,并能实时显示运行时间和速度,在循迹过程中到达特殊定位点时能给出信号。
目录
引言 5
第一章、设计方案工作原理 6
1.1预期实现目标定位 6
1.2技术方案分析比较 6
1.2.1核心单片机的选择 6
1.2.2电源模块的选择 7
1.2.3电机的选择 7
1.2.4 电机驱动的选择 8
1.2.5循迹模块选择 9
1.2.6 显示模块的选择 10
1.2.7 电机转速测量模块 10
1.3系统结构工作原理 11
1.3.1 系统总工作原理 11
1.3.2 电感传感器工作原理 11
1.3.3 霍尔测速传感器工作原理 13
1.4系统相关参数设计 14
1.5测量控制分析处理 14
第二章、核心部件电路设计 14
2.1关键器件性能分析 14
2.1.1 STM32F103特性 14
2.1.2 LDC1000特性 15
2.1.3 TB6612驱动芯片特性 15
2.1.4 LM358特性 15
2.1.5 LM7805特性 16
2.1.6 LM1117T特性 16
2.2核心电路设计仿真 16
2.2.1 STM32单片机最小系统 16
2.2.2 电源模块电路设计 17
2.2.3 循迹模块电路设计 18
2.2.4 电机驱动模块电路设计 19
2.2.5 液晶显示电路设计 20
2.3关键电路驱动与单片机接口 20
第三章、系统软件设计分析 21
3.1主程序设计 21
3.2 信息采集子程序设计 22
3.3电机控制子程序设计 22
第四章、设计工作条件环境 23
4.1 设计工作分工 23
4.2设计分析软件环境 23
4.3仪器设备硬件平台 23
4.4 配套加工安装条件 23
4.5前期设计使用模块 23
第五章、作品成效总结分析 23
5.1 调试过程 23
5.1.1 电源模块调试 23
5.1.2 显示模块调试 24
5.1.3 电机驱动及转速采集模块调试 24
5.1.4 循迹模块调试 24
5.2 功能拓展 24
5.3 个人总结展望 24
第六章、附件 25
6.1 主程序 25
6.2 LDC模块子程序 26
6.3 LCD 1602显示子程序 34
6.4 设计成果展示 37
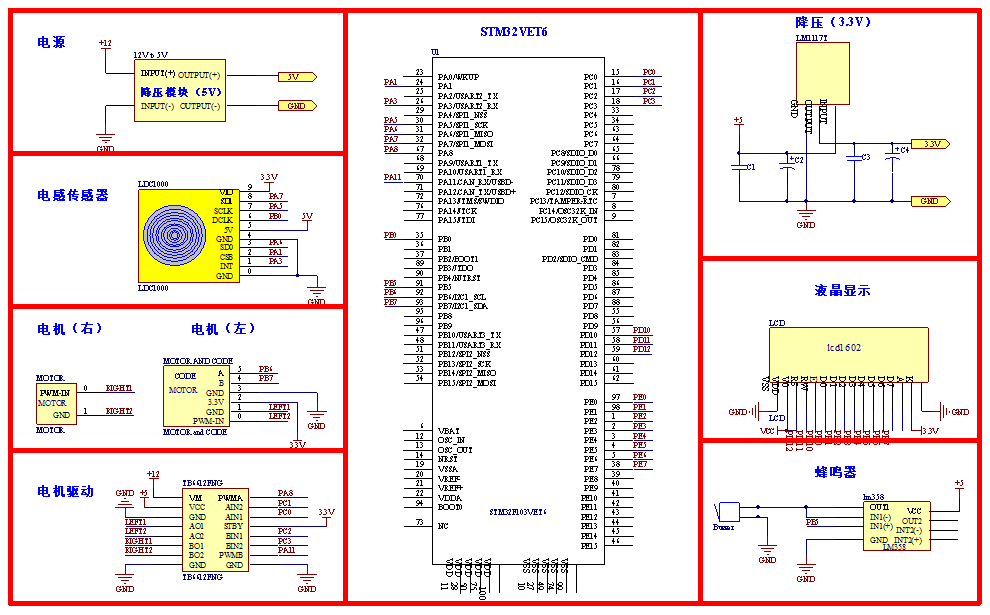
6.5 电路总原理图 37
第七章、参考文献 37
引言
智能循迹小车属于机器人领域,进入信息时代以来,机器人的设计开发一直是一个热门话题,机器人行业的产品也多种多样,任何一种智能化的、可代替人力劳动的机器都可以定义成机器人。随着信息时代的发展,机器人已经涉及到工业、农业、医疗、交通、航天、国防等各种领域;而且机器人的设计越来越智能化、人性化,人们不断更新设计技术,不断改良设计产品就是为了能制造出高智能的、可以完全代替人力劳动的、能更好的为人们的生产生活提供便利的智能机器人。智能小车更是其中的一个热门产品。智能小车的发展很快,产品也正在走向成熟阶段,比如现在的一些无人驾驶汽车便是一种智能车,无人驾驶汽车集定位系统、传感系统、控制系统于一体,可实现无人驾驶自动行驶,自动避障。智能车的关键技术之一是寻迹,自动行驶需要沿着铺设好的路线,而寻迹的方法有多种, 找寻最稳定、最耐用、性价比最高的寻迹传感器是系统设计的关键,也是竞争最大的部分。本设计智能循迹小车是一个基于单片机控制,集传感器、通信和自动控制于一体的智能电子产品,主要有硬件电路设计和系统软件设计两大块。硬件电路方面主要有主控芯片(单片机)的选用、电源模块、电机及驱动模块、传感器模块、显示模块和其它人机接口电路;系统软件设计主要有系统相关参数设计、传感器信息采集控制、电机控制、通信及其它系统控制和信息处理。智能循迹小车设计需综合运用硬件电路基础知识和单片机软件设计知识,需将软硬件知识结合运用,小车的制作还需有较强的动手能力,在整个设计过程中还要查阅有关资料以及不断的调试修改。
整个系统的预期功能是:小车在无人为干预的情况下能沿着铺设好的路线自动前进,并能实时显示运行时间和速度,在循迹过程中到达特殊定位点(放置在地面的硬币)时能给出提示(蜂鸣器响起 )。
参考文献
[1]黄智伟,王兵,朱卫华.STM32F 32位ARM微控制器应用设计与实践[M].北京:北京航空航天大学出版社,2012
[2]刘交凤.智能循迹小车,DOI:10.16589/j.cnki.cn11-3571/tn.2012.01.009
[3]王建平,卢杉,武欢欢.TB6612FNG在直流电机控制设计中的应用[A].电子设计工程,2010
[4]LDC1000使用手册.德州仪器半导体技术有限公司.
[5]杨景昱. LDC1000在硬币识别中的研究,DOI:10.15966/j.cnki.dnydx.2014.07.024
[6]吴炜,严利平,鲍志业,陈科.电感传感器金属探测定位系统设计[J].单片机与嵌入式系统应用.2015年5期
[7]梁晓磊.基于单片机的直流电机转速测量与控制系统设计[J].青春岁月.2015年10期