



苏ICP备112451047180号-6
基于MotoSim EG的工业机器人虚拟示教编程设计
摘要:工业机械技术涉及的主题是相当广泛的。总结一下,是力学和机电一体化技术的电子设备的组合。第三代智能机器人不仅有各种传感器获得外部环境的信息,而且还具有记忆能力,语言能力,图像识别能力,判断推理能力,理解和人工智能,这些都是和微电子技术,特别是计算机技术的应用是密切相关的。其结果是,机器人技术的发展将导致其他技术的发展,机器人技术的发展和应用,也可以用来验证一个国家科技和工业技术的发展水平。在工业生产中的工业机器人可以代替人很长一段时间做一些单调,频繁和反复操作,或者是危险,恶劣的环境,如冲压,压铸,热处理,焊接,涂装,塑料成型,加工及简单的组装过程,并且在原子工业和其他部门完成的有害的过程的人体物质的处理和操作。在工业机器人应用广泛,不仅可以提高产品的质量和产量,而且可以保证人身安全,减轻劳动强度,提高生产效率,改善工作环境,节约原材料消耗,降低生产成本。因此,它是研究和设计机器人的应用,尤其是工业机器人和机器人实际意义。
关键词:工业机器人;示教;编程
目录
第一章 绪论 7
1.1课题的背景及意义 7
1.2国内外研究现状 7
第二章 示教编程介绍 10
2.1安川电机MOTOMAN机器人示教器功能 10
2.2基本操作 11
2.3程序与步骤 14
2.3.1示教程序编写 14
2.3.2示教前的准备 15
2.3.3 开始示教 16
2.4示教的基本步骤 17
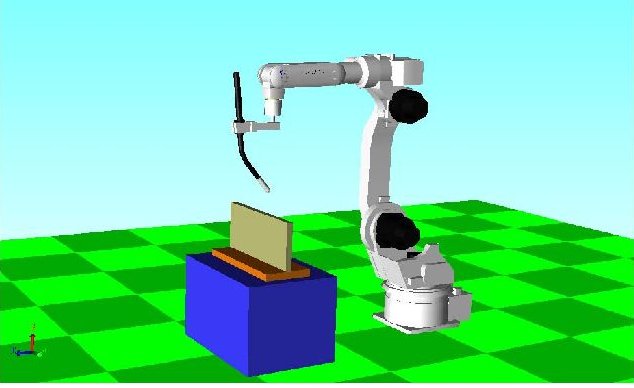
第三章 工业机器人虚拟示教操作 23
3.1概述 23
3.2构建焊接单元 24
3.3创建的模型 28
第四章 工业机器人虚拟示教实现 44
4.1设定的目标点(AXIS6模型) 44
4.2实践 46
4.3回放 53
4.4在线示教的实现 53
小结与致谢 56
参考文献 57
参考文献
1.张爱红,工业机器人应用与编程技术 2015
2.赵春霞,Y.F.LI,王树国等,虚拟现实的发展及在机器人系统中的应用研究,1995,21(5):395-400
3. 马香峰等工业机器人的操作设计,北京冶金出版社1996
4.YASNAC XRC OPERATORS MANUAL. YASKAWAEL ECTEIC CORPORA TION,1999
5.王晓丽 候媛彬.MOTOMAN工业机器人示教方法研究 .2012.西安科技大学
6.顾振宇.全球工业机器人产生现状与趋势.2006
7.牛宗宾.工业机器人交流伺服驱动系统设计.哈尔滨工业大学.2013
8.时国平.工业机器人示教盒系统的设计.江西理工大学.2006