




��ICP��112451047180��-6
���ڶഫ��������������Ͱ���
һ��ѡ���Ŀ�ĺ�����
Ϊ�˼�������������������������ˮԴ����Ⱦ����ֹ�������������ǵĽ������Σ�������һ�������Ч������������պ������õĻ��ڶഫ��������������Ͱ��ʮ���б�Ҫ�ġ�ʹ�û��ڶഫ��������������Ͱ�����ڱ������ǵ���̬������ά�����õ�������ò��������Դ���˷ѡ��ഫ������������Ͱ�ܹ���֪�����ĸ߶Ȳ���ʱ����ʹ����Ա������������ʵ����������������Դ������Ҫ;�����ֶΣ�����Ч����������һ�ֿ�ѧ������������ˣ���չ���ڶഫ��������������Ͱ��ƾ�����Ҫ����ʵ�����һ�����ƹ�Ӧ�ü�ֵ��
�����������������1000�����ң�����Ҫ�ο�����Ӧ��
Ϊ�˴���ƵĿ�ѧ�Ժ��Ͻ��ԣ�ҲΪ������ƹ����жԶഫ������������Ͱ������ԭ������չ��״�Լ�������̬�����˽⣬���˲����˴�����������ף����磺�����ڵȣ�2022��“����NB-IoT�������������Ͱ���”��ë���ǵȣ�2022��“��Ƭ��ԭ�����ӿڼ���”������ȣ�2022��“����SqueezeNet-Tiny�Ŀɻ���������������Ͱ��Ƽ�ʵ��”�ȡ�
��������2022�귢����“����NB-IoT�������������Ͱ���”�У�����STM32Ϊϵͳ������оƬ���������ģ�顢������ģ�顢ˮλ��������ֱ�������ˮ�õ���Ϊ��Χ����������NB��IoTģ��ʵ����������Ͱ�ն���Զ�̼��ƽ̨ͨ�ţ����������Ҫʵ�ֵĹ��ܶ�����Ͱ�ĽṹҲ�������Ż���ơ��ڶ�����Ͱ���нṹ���ʱ�����ʹ�û����ͽṹ��������Ͱ�Ľṹ�������Ż���ƣ���������Ͱ������ڡ�����Ȧ������Ͱ�ǡ���������������������ϵͳ��ִ��������ɡ��ڽ���ϵͳ���ʱ�����ǵ���������Ͱϵͳ�ɶ������Ͱ�ն˺ͼ��ƽ̨��ɣ�����ͨ��NB��IoT����Զ��ͨ�š���ƵĻ�����������������������Ͱ������Զ�����Զ��رչ��ܣ�ͬʱ�ܽ��������Ͱ��״̬��Ϣ���͵�Զ�̼��ƽ̨��������Ͱ���м���Զ�̼�أ��Ա�������Ӧ�ľ��ߡ�
ë���ǵ���2022�귢����“��Ƭ��ԭ�����ӿڼ���”�У���Ե�Ƭ�����ݳ����������⣬�����̵��������˴���ͨ�Ų����ڿ����ݵ�������ʵ�����ݵĸĸͨ���Ը�����ѧϰ���ҶԵ�Ƭ�����пڵĽṹ�����пڿ��ƼĴ����������ʷ����������пڵĹ�����ʽ�����пڵ��ж����룬����ͨ�ŵĴ���У������˸�����̵��˽����ʶ�����������˵�Ƭ��ϵͳ��Ƶ���Ӳ����������֪ʶ������Ӳ����ϵͳ��Ƽ��ܡ�������Щ֪ʶ�ں�����ƶഫ������������Ͱʱ������Ӧ�á�
�������2022�귢����“����SqueezeNet-Tiny�Ŀɻ���������������Ͱ��Ƽ�ʵ��”�У�����SqueezeNet�ĸĽ�ģ�ͣ������SqueezeNet-Tiny�����ģ�ͽϴ���ɵĹ�ҵӦ�����ѡ��ɻ�������ͼ������̫������ɵ�ģ�ͷ���������������⡣�����ƵĿɻ����������ݼ���Recyclable Waste Dataset����ʵ�飬��֤�����ڲ��������ٵ������Ҳ�������õķ���������������ָ������ͼ��ʶ��Ĺ����У���ͳ�ľ�������������ͨ�� �Ķѵ������������ȡ�ϸߵ�ģ����ȷ�ʣ�����AlexNet��VGG16Net��GoogleNet�ȣ�����������������ӵ�����ģ�����Ӵ���������������С�����ݼ����׳��ֹ����������ģ����ȷ�ʲ���������ͬʱ���Ĵ���ѵ��ʱ�䣬�����ڶ���������Ż��ͺ�����Ӳ����������Ϊ�˱�֤ģ�����ܵ�ͬʱ��Сģ�͵IJ�������������������������ģ�͵����������Ե���Ϊ��Ҫ�����л���SqueezeNet-TinyǶ������ݮ���ϣ�����ʵ���˿ɻ������������ܷ��ࡣ
ͨ������������ѧϰ�����˶��ڶഫ��������������Ͱ���������ʵ��֪ʶ�������ڶ�ǰ������������Ͱ����ƽ�����������о��������ڶ�ܷ������в��㡣��ˣ����ľ����о���ֵ��һ������ʵ���塣
���������
�Ի��ڶഫ��������������Ͱ�о���Χ���н綨���Ѽ�����о����������ϣ��˽���ڶഫ��������������Ͱ�������̡�ͨ�����У�ȷ������Ŀ�о���Χ����������Ŀ����������Լ�Ҫʵ�ֵ���Ҫ���ܡ����յ�Ƭ������ϵͳ�������Ʒ������г���ѡ������ʵ�ֶ�����Ͱ�ǵ��Զ����ƺͶ������߶ȵļ�⡣
1 ����
1.1 ѡ������ݼ�����
1.2 ��������Ͱ�ķ�չ�ſ�
1.3 �������Ҫ�о�����
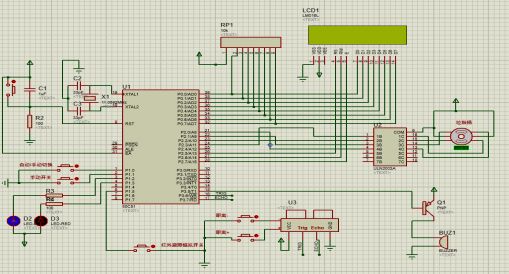
2 ϵͳ�������
2.1 ϵͳ�����ͼ
2.2 STC89C52RC ��Ƭ��
2.3 Һ����ʾ��оƬ
2.4 ��λ��·
2.5 �����·
3 Ӳ����·���
3.1 �����Ӧģ��
3.2 �������ģ��
3.3 ���������ģ��
3.4 ������ģ��
3.5 ��Դģ��
4 ϵͳ�������
4.1 ϵͳ������������ͼ
4.2 ���������ģ��ij������
4.3 ���Ƶ������ת�ij������
4.4 Һ����ʾ�������
5 ϵͳ���������
5.1 ϵͳ����
5.2 ʵ�����
�ġ��о����������輰��ʩ��
��һ���о�����
1.���۷���ͨ�����ϲ�����ۿ���صĽ�����Ƶ���������Լ���������뵽�Լ�������У��ڼ������ʻ�����ѧ���ϵ����⣬��ʱ��ָ����ʦ����������Լ������⡣
2.�����о�����ͨ��ͼ��ݽ�������鼮�������ռ��Ƽ�ǰ����Ϣ���˽�����������о��ɹ�����������������ϣ��˽���Ʒ��������֪ʶ�����ռ����������з���������ѡȡ��������Ҫ�IJ��֣������������ơ�
3.�Ա��о�����ͨ�������������е���������Ͱ���бȽϣ�ȡ�侫��ȥ�����ɣ���ȷ�������Ʒ�����
�����������
��һ�Σ����ݱ�ҵ����������Ҫ����Ϥ���˽����������ݣ���ͼ��ݣ������ϴ����������ϣ�Ȼ��ʼд���ⱨ�棻���ָ����ʦ��������������ɿ��ⱨ����ģ���Ժ����ʼ��ҵ��ơ�
�ڶ��Σ�ͨ��֮ǰ��ͼ��ݡ�֪���������ϲ�ѯѧϰ���������������֪ʶ��
�����Σ����÷ż�ʱ�䣬�Լ�����֮ǰ���õ��IJ��ϣ����з��淢�������ڵ����Ⲣ��ʱ������
���ĽΣ�ʵϰ�ڼ���ɱ�ҵ���ģ���ҵ���Ķ��壻����硣
�������о���ʩ
1.����ѧУͼ��ݲ���������ϡ�
2.���������������������Ͱ�������о��乤��ԭ���ͽṹ��
3.����Proteus 8 Professional���Խ�������������Ͱģ�ͽ��н��з���ʵ�顣
�塢���Ȱ���
2022.10.20—2022.11.04 �������ϡ�д���ⱨ�棻
2022.11.5—2022.11.20 ���ⱨ��д������鼰���ģ�
2022.11.05—2022.12.22 ������ƣ�������ij��壻
2022.12.23—2022.12.31 ��չ���ڼ�飻
2022.12.23—2023.04.06 ������ƣ�������Ķ��塢���أ�
2023.04.7—2023.04.14 ��չ��ҵ������ģ�
2023.04.15—2023.04.30 ���б�ҵ��ƴ�磻
2023.05.01—2023.05.06 �ύ�ɼ���
2023.05.06—2023.05.30 ��ҵ��ƹ鵵��
������Ҫ�ο�����
[1]������.����NB-IoT�������������Ͱ���[J].�Զ����������DZ�,2022(09):124-127+131.
[2]ë����,����,������.��Ƭ��ԭ�����ӿڼ���[M].����:�����ѧ������,2022.
[3]���,�ຣ��,�����,��h��,̷����.����SqueezeNet-Tiny�Ŀɻ���������������Ͱ��Ƽ�ʵ��[J].�ִ���Ϣ�Ƽ�,2022,6(17):75-77.
[4]�⽣Ӣ,ƽѩ��,������,��.���ƶ���������Ͱ��λ����⼼��[J].��е�������Զ���,2020,49(04):162-164.
[5]̷��÷,����.���ڵ�Ƭ������������������������[J].����ʦ��ѧԺѧ��,2020,40(03):96-103.
[6]��׳׳,��ΰ��,�뺣��,��.��������������������Ͱ[J].����������,2021,11(3):62��63+67.
[7]�²���,����,����ǿ.����MSP430F149�������¶Ȳɼ�ϵͳ���[J].�Զ����������DZ�,2020,(4):93��96��
[8]�����,������,�Ű���,��.�������ѧϰ���������������[J].���������,2022,48(2):1-9.
[9]����,��ѫ,����.����NB-IoT����������Ͱϵͳ�����ʵ��[J].�������������ܴ�����Ӧ��,2021(5):97.
[10]ʢ����,������,����,����ͯ.����STM32��������Ͱ�����[J].��������.����Ӧ��,2021(07):48.
ժ Ҫ
����Ͱ�����ǵ��ճ������бز����٣�Ŀǰ���г��ϵ�����Ͱ�����廨���ţ����Ǵ�����Ͱ�������Ǵ�ͬС��ĽŲ�ʽ���ֶ�����ʽ�Ŀ���ʽ����Ͱ�����ܵ�һ��ʹ����Ա���ܼ�ʱ��Ϥ���������������ִ��Ƽ��ķ��ٷ�չ�����ഫ�����������죬���ڴ������������豸Ҳ���������������������һ����ڶഫ��������������Ͱ���������õķ�չǰ����
���α�ҵ��ƻ��ں�������ͳ�������������չ��������Ͱ���о������Ȼ���������������ϵͳ������ơ���������Ͱ����ϵͳ������Ͱ�����⣬��STC89C52RC��Ƭ����LCD1602Һ����ʾ��оƬ�������Ӧģ�顢�������ģ�顢���������ģ�顢������ģ�顢��Դģ��Ȳ�����ɡ�Ȼ���ϵͳ�ĺ����Ӧģ�顢�������ģ�顢���������ģ�顢������ģ��͵�Դģ���Ӳ����·��������ơ������ڷ���ϵͳ����ʱ��Ļ����ϣ�����˳��������ģ�顢���Ƶ������ת��Һ����ʾ�ȳ�����ơ��������Proteus 8 Professional������ϵͳ���з����������������ʵ����ԡ�
�����ʵ����Խ��������������Ƶ���������Ͱʵ���˸�Ӧ�������Զ����ظǡ������߶ȼ�ⱨ���ȹ��ܣ�ʵ����ǿ������������Ͱ��������ǵĻ�����ʶ��һ���Ĵٽ����ã����нϺõ��ƹ��ֵ��
�ؼ��ʣ���������Ͱ����Ƭ����������
1 �� ��
1.1 ѡ������ݼ�����
��������������������������ٵ���Ҫ����֮һ��������Σ���������ԣ�ȫ��Χ�ڵĹ��Ҷ����������ӡ��ԴӸĸ↑���������ҹ�����Ѹ�����������л���־Խ��Խ���ԣ���ҵ������ҵ���չ����������϶�������������������ǷŴ��ط�����Դ������Ҫ��������Σ���ԣ�ÿ�ղ��������������������������ǽ����������Ź��õĿ��ٷ�չ���������ϵ��������ܼ�ʱ���ٵ���������ɵĻ���Σ��������������ҲԽ��Խ���أ�������������Ͱ�ij����DZ�Ҫ�ġ�
�����ִ��Ƽ��IJ��Ϸ�չ�Լ�������������IJ�����ߣ����ǿ�ʼ��������������Ȼ��г�ദ������������л�����������Խ��Խ�������ǵĸ߶����ӡ��ֶ�����ʽ����Ͱ����ʹ�ú�ά����������⣬�����ң����׳�ʪ���������ζ����ϸ�������ֶ�����ʽ����Ͱ���ױ���ά�ɱ��ߣ������ڿɳ������á���������ַ������Ų�ʽ��������Ͱ���������ڽŲ����Ȳ��˿��ƣ��������������̤����̤�������������̣���Ҫ����ά�ޣ�������������ʱ��Ҫһֻ�Ų���̤���ϣ��������岻�ȣ�������ɰ�ȫ���⣬ʮ�ֲ����㡣����������������һ����������Ͱ�����и�Ӧ�����Զ����ǡ����������Զ��رո��ӡ�����װ����ʱ������ֹ�����ѻ��Ĺ��ܡ��ɴ˻��ڶഫ��������������ͰӦ�˶������������õ���ʵ���塣���ij��ֱ�־�����ǶԻ����ı�����ʶ�������һ����Σ�ͬʱҲ�����ڵĿƼ������ṩ��һ���ܺõ�չʾƽ̨��
1.2 ��������Ͱ�ķ�չ�ſ�
����Ͱ��Ϊ�����ճ������ȱ�ٵ�װ�ã����ڷŵĵص�ɷ�Ϊ��������Ͱ�ͼ�������Ͱ����������ʿɷ�Ϊ��������Ͱ��ľ������Ͱ�Լ���������Ͱ�������������ͥΪ�����ۣ���ѡ�����ݻ��ϴ���ۼ���������Ͱ���������з�����Ŀǰ�����ϵ�����Ͱ��Ҫ�������д��Ľ��ĵط���
��1������Ͱ�ܷ��Բ�ǿ����û�иǰ壬������Χɢ��������ζ������������ϸ�����Ի��������嶼��һ����Σ���ԡ�
��2�����Զ��ǰ壬Ϊ�������ߵ��û��������㡣
Ŀǰ���г����кܶͬ������Ͱ��������ƶ��ԣ�����ֻ�������ýŲȿ��ǵĻ�ֱ���DZ�¶�����ģ�û�м��ܡ��ڴ������������ٷ�չ��ʱ�������и��ֹ��ܵ������������DZ����Զ����豸�������������ճ������С��ڲ��õĽ��������ܼ������Զ����������õ����㷺��Ӧ�ã���˿���������������佫��һ����Ȼ�����ơ����˴�ͳ�Ŀ���ʽ�����䣬����г���Ҳ�в�ͬ���ͺ��ܵ����������䡣����г�������������������ʹ�ú�������������豸�����һЩ���⡣ͨ�����ɵ�·�����������źŲ����䷢�͵������·����������������������ǵĴرգ��Դﵽ���ܴر������ǵ�Ŀ�ġ����˺�������Ͱ��⣬��������������Ϣ������Ͱ���пɹ㲥����������������װ������Ͱ�ײ���Ͱ���ϣ��������ֶ����ư�ť�������㡣����Ͱ��Ϊ�����ճ������в��ɻ�ȱ��һ���֣���Ȼ������ʱ���Ľ����ͼ����ķ�չ�����º�ȡ������ø������ܺͷ��㡣��������Ͱ�Ѿ����������������һ��С���ԣ����������ǵ�����״̬���кܳ���·Ҫ�ߡ�
1.3 �������Ҫ�о�����
�������Ҫ����STC89C52RC��Ƭ����Ϊϵͳ�ĺ�����ƣ�����һ��������������ϵͳ��ϵͳ���ջ��Զ�ʶ�������߶ȣ��������Ƿ������档����Ʋ�����ͨ���������̽��������ǰ��������Ա����������Ϊ�������ġ��������������Ȼ����������ת��Ϊ�ǶȻ��ߣ������������Ľ���ת�Է��������䲢�ر������䡣�������������ȷ�������Ƿ�������������Ͱ��������������������Ծ�����������Ͱ�ѱ������������о��������£�
��1������ָʾ�Ƶ�����������жϺ����Ӧ�Ƿ�����壻
��2��Ͱ�������ĸ߶ȿ���ͨ�����������ģ������⣻
��4��LCD1602Һ���ܹ���������ʾ����ǰ����Ͱ��״̬��
��5���������ܹ������������Ǵ���������